在上一篇文章中,我们得到的轨迹并不是很好,与路径差别有点大,我们期望规划出的轨迹跟路径大致重合,而且不希望有打结的现象,而且希望轨迹中的速度和加速度不超过最大限幅值。为了解决这些问题有两种思路:
思路一:把这些”期望“加入到优化问题中。
思路二:调整时间分配,来避免这些问题。
1.corridor
1.1 corridor是什么?
为了限制轨迹的形状,引入了corridor的概念,corridor可以理解为可行通道,如下图,规划出的轨迹必须在corridor内。直观的思路是:如果能把corridor当作约束加入到QP问题中,那么解得的轨迹自然就在corridor内了。 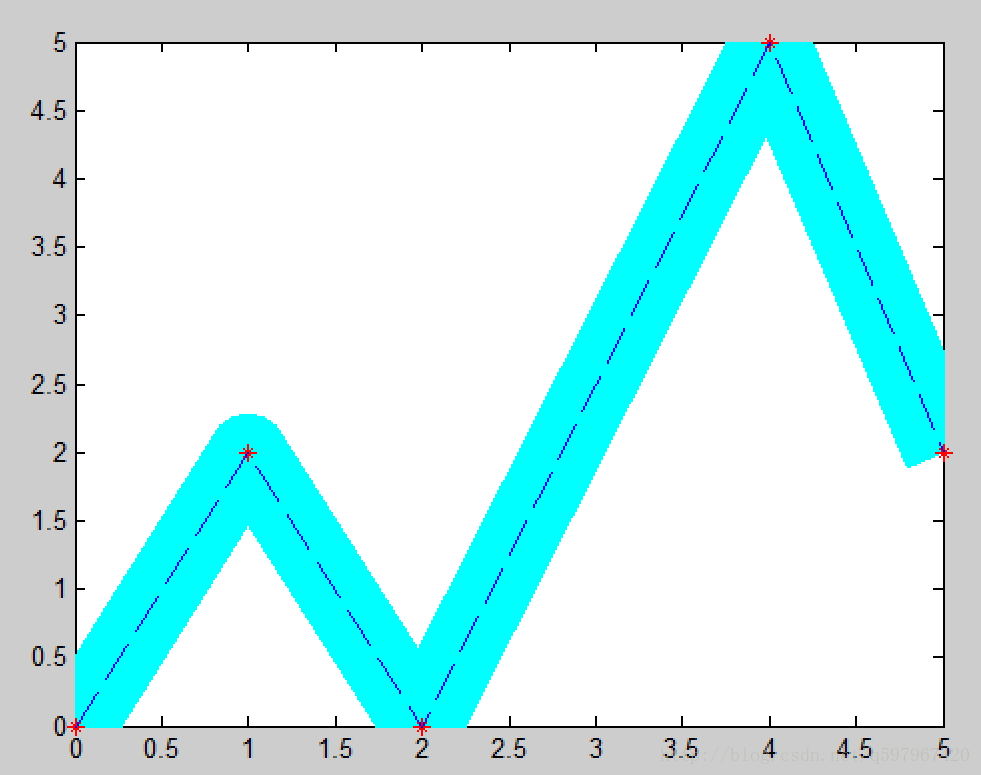
1.2 corridor约束怎么加?
很容易想到,把之前的等式约束 改成不等式约束
改成不等式约束 和
和 。然而,不管是等式约束还是不等式约束,都是针对一个特定的时刻,而实际希望的是对所有时刻
。然而,不管是等式约束还是不等式约束,都是针对一个特定的时刻,而实际希望的是对所有时刻
,都需要在corridor中。
一个简单粗暴的思路:在路径上多采样一些中间点,每个中间点都加corridor约束。尽管这种方法理论上只能保证采样点在corridor中,但实际过程中,如果corridor大小和采样步长设置得合理,而且不Fix
waypoints,能work的比较好。这里不fix
中间点的位置,是为了去掉中间点的强约束,尽量避免轨迹打结,实际中,我们也是不一样要求轨迹完全经过中间点,只要在那附近(corridor)内就行。
1.3 构造corridor不等式约束
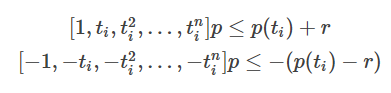
为了方便构造,对于每一个采样点pt,我们施加一个矩形的corridor,即

这里用矩形corridor是因为斜线corridor(平行四边形)不好构造,而且我们只需要大致在corridor里面就好,没有必要非弄一个严格的斜线corridor。对于每个采样点,设矩形corridor的边长为2r,增加两个位置不等式约束:
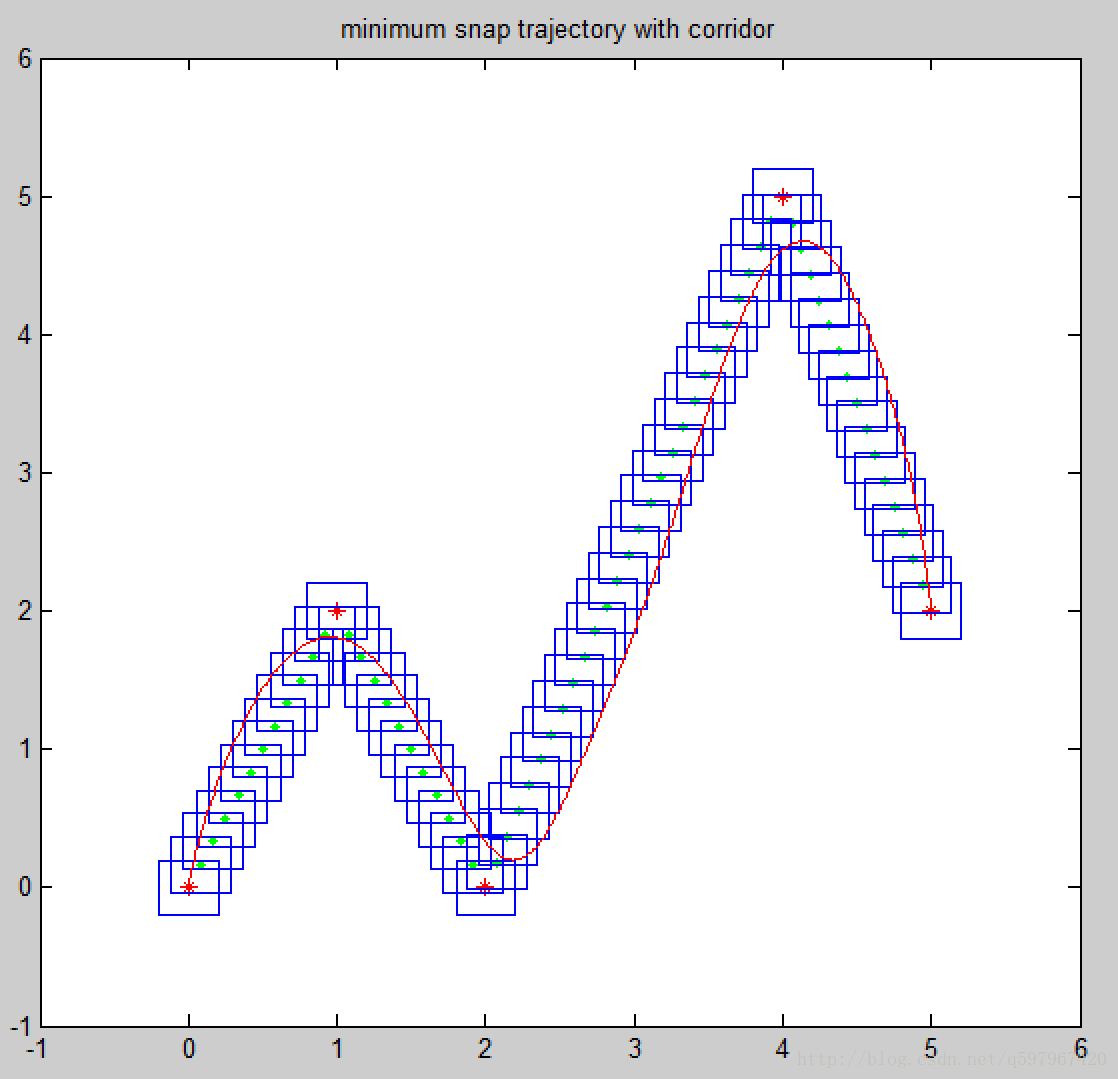
1.4 实验结果
代码见这里
优化列表in
- min:snap
- 等式约束:起点pva(3)+终点pva(3)+中间点pva连续(3*(nploy-1))
- 不等式约束:中间点位置corridor(2*(nploy-1))
优化结果如下图所示,绿色的点为按固定步长新采样的中间点,每个中间点都有一个矩形corridor,红色为优化后的轨迹。可以看到,去掉中间点的位置强约束(等式约束)改成弱约束(corridor不等式约束)后,轨迹比之前要好很多,而且尽管轨迹有小部分超出了corridor(因为只加了采样时刻的位置corridor约束),但基本不会超出太多。
但这带来的一个问题是,为了保证轨迹不超出corridor,需要采样比较密,但这样轨迹的段数就上来的(轨迹段数=waypoint数量-1),优化参数变多了,计算效率会下降。
- 一种解决思路是通过corridor合并来减少中间点轨迹段数,从而提高计算效率;
- 另一种解决思路是,不采样中间点,直接规划出轨迹以后,找到轨迹的极值点(波峰、波谷),若极值点位置超出corridor,在极值点上添加一个corridor或者位置强约束(俗称”压点“,把极值点压到corridor以内),以此迭代。实验证明:压有限个(不超过路径点总数)点就能把整段轨迹压到corridor以内。
1.5 广义corridor
上面实验介绍了位置corridor,也就是位置不等式约束,但同样也可以扩展到速度corridor、加速度corridor乃至更高阶。
诶~是不是有点灵感?上一篇文章中实验得到的轨迹的另一个问题是速度、加速度超过了最大限幅,所以同样的思路每个waypoint都增加速度、加速度corridor,是不是就能解决了?
然而,并不能!!! 为什么呢?举个简单的例子,假设一维空间规划一条轨迹从0到10,给定总时间T=1s,要求最大限速2m/s,满足要求的轨迹根本不存在,即使你加很多中间点并加速度corridor,得到的轨迹在采样点中间肯定会速度蹭的巨高。
速度、加速度之所以很大,是因为时间给的不合理(时间太小),所以这种情况光靠加corridor是行不通的,还是要从时间分配的层面来解决。
2. 时间分配
时间分配是轨迹规划中很关键的一个问题,它直接影响规划结果的好坏。
2.1 初始时间分配
总时间给定:通常给一个平均速度,根据总路程计算得到总时间
各段时间分配:
匀速分配:假设每段polynomial内速度恒定不变,这样各段poly的时间比就等于路程比。
梯形分配:假设每段polynomial内速度曲线为:以恒定加速度a从0加速到最大速度vmax,再以−a减速到0。a和vmax事先给定,就能得出每一段所需要的时间。
设各段时间分别为t′1,t′2,...,t′n,求前k项和可以得到轨迹分段的时刻向量t0=0,t1=t′1,t2=t1+t′2,...,tn=tn−1+t′n。
2.2 feasibility check
有了时间分配,就可以规划得到轨迹参数,对于轨迹参数,求速度和加速度曲线的极值,判断是否超过最大限幅,如果所有极值都小于最大限幅,则得到可行轨迹。如果不满足,则需要调整该段的时间。
调整的方法是:增大unfeasible段poly的时间,显然,增大时间会使得速度和加速度都变小。通常以一个固定的比例来调整时间如(k=1.2~1.5),并进行迭代,每调整一次,重新规划轨迹并check feasibility,如若不满足,再次加大时间,直至满足为止。
2.3 corridor与时间分配的关联
不等式corridor约束实际上也有时间分配的效果,可以这么想,polynomial的分段点(轨迹中间点)在corridor内移动,实际上就相当于分段点的时刻在移动,中间点在corridor内移动,也就变相调整了前后两段poly分配的时间。
举个简单的例子,如下图所示,
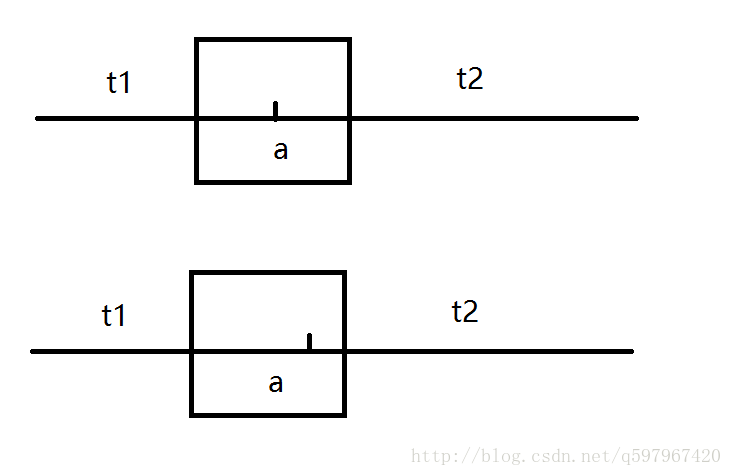
两段轨迹的分段点为a,初始时间分配为t1,t2,比如说想减少前一段的时间t1,加大后一段的时间t2,其实就相当于把分段点a向右挪。也就是说,还是前段poly仍然分配t1时间,但走的路程更多了(相当于原来路程所用的时间减少了),后一段poly在t2时间走的路程更少了(相当于原来的路程所用时间增加了)。所以如果corridor比较大的话,时间调整的空间就会更大,规划出的轨迹就会更平滑。
3. 归一化时间参数
轨迹规划中容易出现一些数值问题,比如需要求t的高阶指数,如果t比较大,计算数值就会很大,而且最终轨迹的参数会很小,特别是高阶项系数,比如很有可能小于float的精度,所以一般计算过程中最好用double。
但还有一种办法,是把轨迹参数做时间归一化,将时间归一化到[0,1]之间。设未归一化的轨迹为 ,令时间
,令时间 ,则
,则
其中, ,T为轨迹总时间,
,T为轨迹总时间, 就是归一化时间的轨迹参数,它们不会像非归一化参数那么小,便于参数传递。
就是归一化时间的轨迹参数,它们不会像非归一化参数那么小,便于参数传递。
归一化参数如何求pva?
对于任一时刻t,先除以总时间T得到归一化时间
注意:归一化事件参数后,位置计算和原来相同,但速度计算需要除以T,加速度需要除以T2,即每求一阶导需要除以一个T。
实验过程中,用Matlab求解,如果一开始就用归一化时间参数,会解不出来,不知为何?所以,在求解过程中,仍然用的非归一化时间参数,而求解完以后,参数传递出去时,转换成归一化时间参数。
参考链接:https://blog.csdn.net/q597967420/article/details/77623235