如果QP问题只有等式约束没有不等式约束,那么是可以闭式求解(close form)的。闭式求解效率要快很多,而且只需要用到矩阵运算,不需要QPsolver。
这里介绍Nicholas Roy文章中闭式求解的方法。
1. QP等式约束构建
闭式法中的Q
矩阵计算和之前一样(参照文章一),但约束的形式与之前略为不同,在之前的方法中,等式约束只要构造成[...]p=b的形式就可以了,而闭式法中,每段poly都构造成

其中d0,dT为第i段poly的起点和终点的各阶导数组成的向量,比如只考虑PVA: ,当然也可以把jerk,snap等加入到向量。注意:这里是不管每段端点的PVA是否已知,都写进来。
,当然也可以把jerk,snap等加入到向量。注意:这里是不管每段端点的PVA是否已知,都写进来。
块合并各段轨迹的约束方程得到
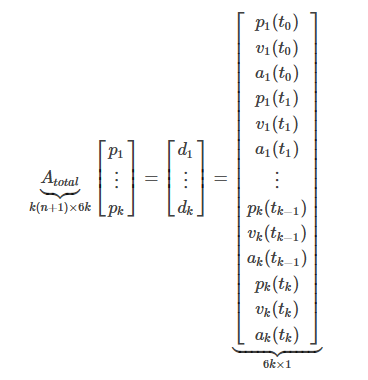
k为轨迹段数,n为轨迹的阶数,设只考虑pva,Atotal的size为 。这里为了简化,没有把每段poly的timestamp都改成从0开始,一般,为了避免timestamp太大引起数值问题,每段poly的timestamp都成0开始。
。这里为了简化,没有把每段poly的timestamp都改成从0开始,一般,为了避免timestamp太大引起数值问题,每段poly的timestamp都成0开始。
由上式可以看到,Atotal是已知的(怎么构造可参见文章一中的等式约束构造方法),而d中只有少部分(起点、终点的pva等)是已知的,其他大部分是未知的。如果能够求出d,那么轨迹参数可以通过p=A-1d很容易求得。
2. 如何求d?
闭式法的思路是:将向量中的变量分成两部分:”d中所有已知量组成的Fix部分dF”和”所有未知量组成的Free部分dP”。然后通过推导,根据dF求得dP,从而得到d,最后求得p。
下面介绍整个推导过程,
2.1. 消除重复变量(连续性约束)
可以会发现,上面构造等式约束时,并没有加入连续性约束,连续性约束并不是直接加到等式约束中。考虑到连续性(这里假设PVA连续),d
向量中很多变量其实重复了,即

因此需要一个映射矩阵将一个变量映射到两个重复的变量上,怎么映射?
- 如
[aa]=[11]a
,将变量a映射到左边向量中的两个变量。
所以构造映射矩阵

即d=Md'd。
2.2 向量元素置换
消除掉重复变量之后,需要调整d'中的变量,把fix部分和free部分分开排列,可以左乘一个置换矩阵C,使得

C矩阵怎么构造?
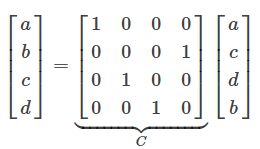
- 举个例子,设
 ,其中a,b,c是已知(dF),b未知(dp),构造一个4×4的单位阵,取dF所在的(1,3,4)列放到左边,再取dp所在的(2)列放到右边,就构造出置换矩阵C:
,其中a,b,c是已知(dF),b未知(dp),构造一个4×4的单位阵,取dF所在的(1,3,4)列放到左边,再取dp所在的(2)列放到右边,就构造出置换矩阵C:
abcd