获得相机内参矩阵
roscore
roslaunch realsense2_camera rs_rgbd.launch
rostopic echo /camera/color/camera_info
运行之后显示如图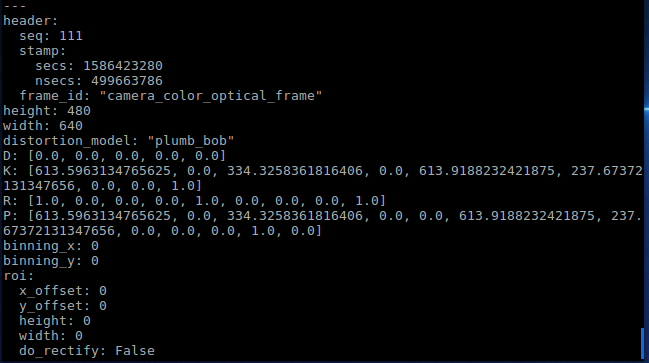
K就是我们得到的内参矩阵写成了向量模式。
K = [fx 0 cx 0 fy cy 0 0 1 ]
然后就是baseline,根据官方datasheet,
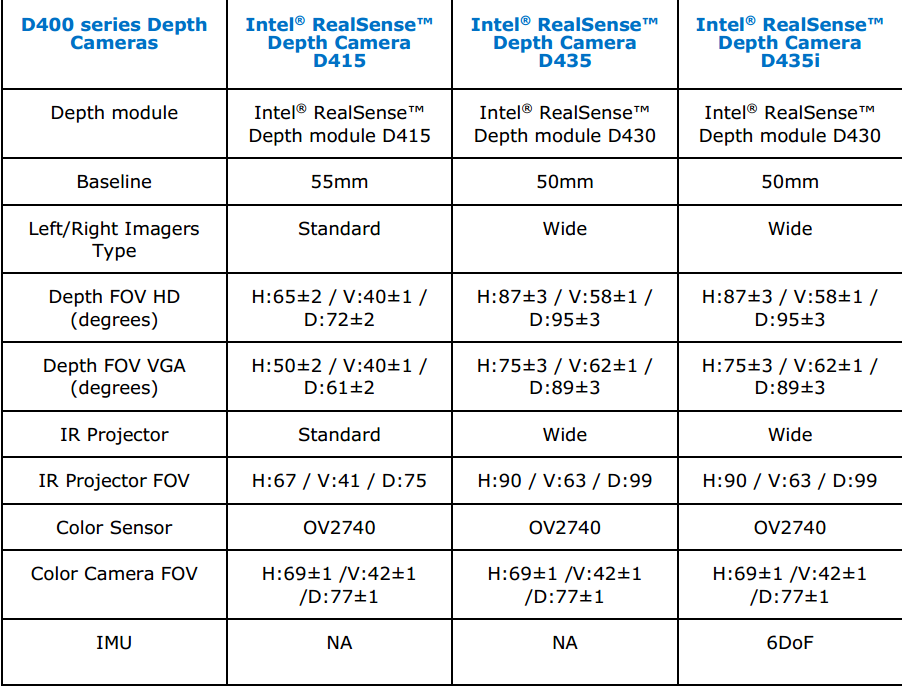
D435 的baseline为50mm,bf的值为bf = baseline (in meters) * fx。
给出根据相机参数得到的新的yaml文件
%YAML:1.0 #-------------------------------------------------------------------------------------------- # Camera Parameters. Adjust them! #-------------------------------------------------------------------------------------------- # Camera calibration and distortion parameters (OpenCV) Camera.fx: 613.5963134765625 Camera.fy: 613.9188232421875 Camera.cx: 334.3258361816406 Camera.cy: 237.67372131347656 Camera.k1: 0.0 Camera.k2: 0.0 Camera.p1: 0.0 Camera.p2: 0.0 Camera. 640 Camera.height: 480 # Camera frames per second Camera.fps: 30.0 # IR projector baseline times fx (aprox.) Camera.bf: 30.6798156738 # Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale) Camera.RGB: 1 # Close/Far threshold. Baseline times. ThDepth: 50.0 # Deptmap values factor DepthMapFactor: 1000.0 #-------------------------------------------------------------------------------------------- # ORB Parameters #-------------------------------------------------------------------------------------------- # ORB Extractor: Number of features per image ORBextractor.nFeatures: 1000 # ORB Extractor: Scale factor between levels in the scale pyramid ORBextractor.scaleFactor: 1.2 # ORB Extractor: Number of levels in the scale pyramid ORBextractor.nLevels: 8 # ORB Extractor: Fast threshold # Image is divided in a grid. At each cell FAST are extracted imposing a minimum response. # Firstly we impose iniThFAST. If no corners are detected we impose a lower value minThFAST # You can lower these values if your images have low contrast ORBextractor.iniThFAST: 20 ORBextractor.minThFAST: 7 #-------------------------------------------------------------------------------------------- # Viewer Parameters #-------------------------------------------------------------------------------------------- Viewer.KeyFrameSize: 0.05 Viewer.KeyFrameLineWidth: 1 Viewer.GraphLineWidth: 0.9 Viewer.PointSize: 2 Viewer.CameraSize: 0.08 Viewer.CameraLineWidth: 3 Viewer.ViewpointX: 0 Viewer.ViewpointY: -0.7 Viewer.ViewpointZ: -1.8 Viewer.ViewpointF: 500
realsense发布(publish)的camera data 在/camera/color/image_raw 和 depth data 在 /camera/depth/image_rect_raw ,所以我们要更改 ~/ORB_SLAM2/Examples/ROS/ORB_SLAM2/src/ros_rgbd.cc下接收的位置
之后要再运行./build_ros.sh
最后运行
roscore rosrun ORB_SLAM2 RGBD ./ORB_SLAM2/Vocabulary/ORBvoc.txt ./ORB_SLAM2/Examples/ROS/ORB_SLAM2/my_rs_D435i.yaml roslaunch realsense2_camera rs_rgbd.launch