- 开发环境:Linux(Ubuntu16.04)+ Python3 + flask + serial + putty
- 先附上龙芯机器人控制器的连线方法:




- 电源的规格:12V/3A
- 龙芯机器人控制电源板开关说明(红色接线那张图),左边的是舵机电源开关,右边是开发板的电源开关,推进去是打开开关。
- 注意,舵机的棕色线接GND。
- 图4 USB转TTL的线连接方法:白色、绿色和黑色线,分别对应开发板中的TX2、RX2和GND。
- 使用命令 :
ls /dev
结果如下图,出现USB设备:ttyUSB0

- 给这个端口赋予一定的权限,不然没办法工作,可以使用下面两种方法中的任意一种。
- 第一种:
sudo chmod 777 /dev/ttyUSB0
修改端口的权限,但重启之后可能失效
- 第二种:
sudo usermod -aG dialout captain
其中captain是我的用户名,改成你想使用USB的用户即可,讲此用户加入到dialout用户组,注销电脑即可,下次也不需要重启。
- 使用putty工具进行通信:
sudo putty
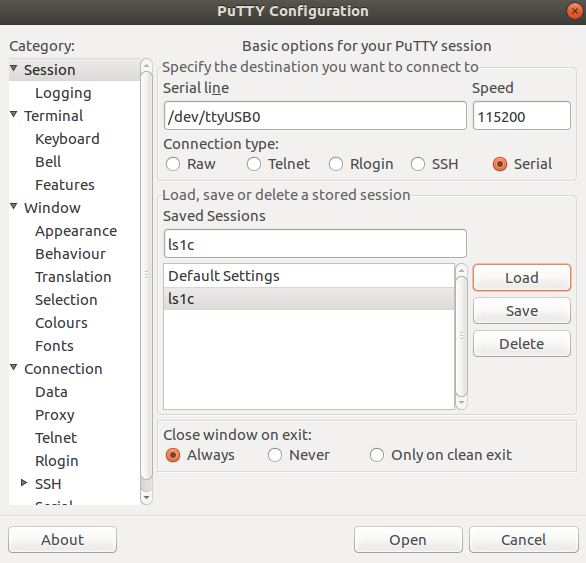
- 安装上面的参数进行设置,打开之后,开发板上电:

- 如果你拿到的机械手臂在 /home/servo/下存放了某些脚本,下面的内容可以跳过,否则请自行创建,记得权限更改为可执行。
- 创建一个文件来存放脚本,并创建激活和关闭端口的脚本:
mkdir /home/servo
cd /home/servo
touch init.sh
touch close_pwm.sh脚本的内容在我的github上,文件名为shell,等下附上地址。
- 到这里基本上和开发板通信已经没有问题了,下面上位机的简单说明:
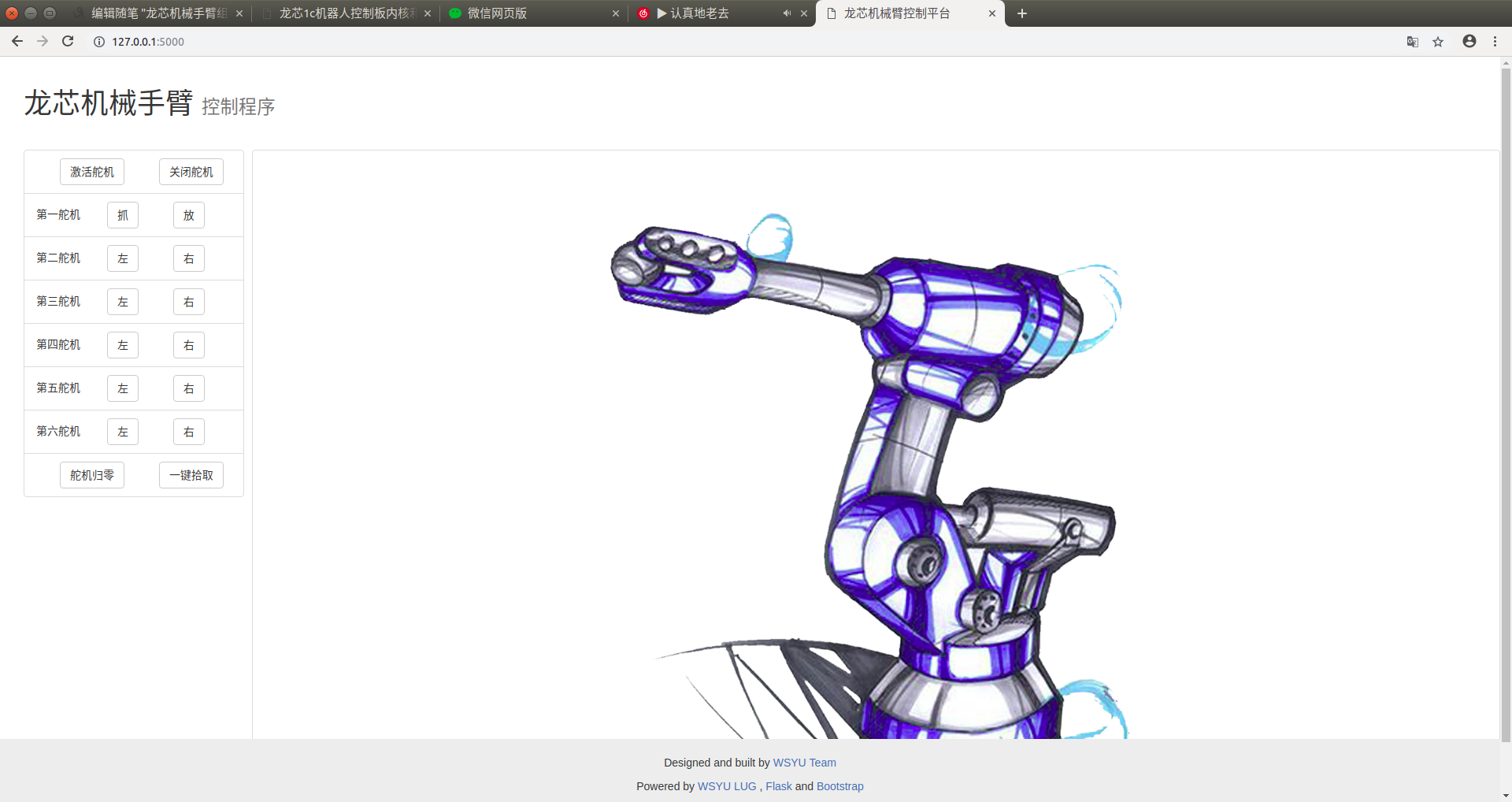
- 先点击激活舵机,然后可以进行舵机操作,退出时点击关闭舵机,
 点击激活之后的状态,也是归零的状态。
点击激活之后的状态,也是归零的状态。 一键拾取的物品大概放置的位置,之后会顺时针旋转90度之后将物品放下,之后会回归原位。
一键拾取的物品大概放置的位置,之后会顺时针旋转90度之后将物品放下,之后会回归原位。- 注意!!!请注意点击按钮之间的间隔在1s以上!!!
- 源代码在github上:https://github.com/longbigbeard/loongson-arm
- 有问题可以联系我。
- 以上。