第三章 线性系统的时域分析方法
3-1 系统时间响应的性能指标
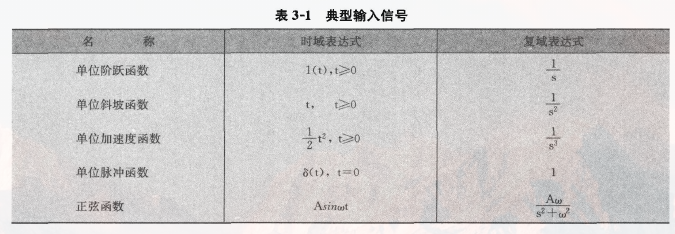
1. 典型输入信号
2. 动态过程与稳态过程
动态过程:指系统在典型输入信号下,系统输出量从初始状态到最终状态的响应过程。根据系统结构和参数选择情况,动态过程表现为衰减、发散或等幅振荡形式。
稳态过程:系统在典型输入信号下,当时间t趋向于无穷时,系统输出量的表现形式。
3. 动态性能
- 上升时间:响应从终值10%上升到90%所需的时间;对于有振荡的系统,亦定义为响应从零第一次上升到终值所需要的时间。上升时间越短,响应速度越快。
- 峰值时间:响应超过其终值到达第一个峰值所需的时间
- 调节时间:响应到达并保持在终值 $pm$5% 内所需的最短时间
- 超调量 (sigma\%):响应的最大偏离量 (c(t_p)) 与终值 (c(infty)) 的差与终值 (c(infty)) 比的百分数。若 (c(t_p)<c(infty)),则响应无超调。
3-2 一阶系统的时域分析
系统对输入信号导数的响应,等于系统对于输入信号响应的导数。
跟踪能力:
时间常数越小,响应速度u越快。
阶跃输入:无稳态误差;斜坡输入:稳态误差等于时间常数T
当传递函数为 (Phi(s) = frac1{Ts+1})时,一阶系统对典型输入信号的输出响应:
| 输入信号 | 输出响应 |
|---|---|
| (1(t)) | (1-e^{-t/T},quad tge0) |
| (delta(t)) | (frac1Te^{-t/T}quad tge0) |
| (t) | (t-T+Te^{-t/T}quad tge0) |
| (frac12t^2) | (frac12t^2-Tt+T^2(1-e^{-t/T})quad tge 0) |
3-3 二阶系统的时域分析
标准二阶系统微分方程
闭环传递函数
(omega_n) —— 无阻尼自然振荡频率
(zeta) ——阻尼比(相对阻尼系数)
开环传递函数
标准二阶系统的特征方程和特征根
令闭环传递函数的分母等于0就得到了标准二阶系统的特征方程
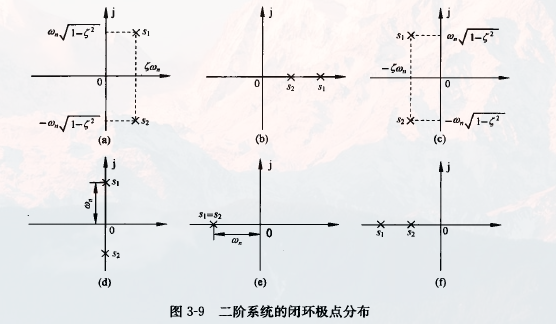
(zeta) 的取值决定特征根在 (s) 平面的位置。
称:
(0<zeta<1) —— 欠阻尼
(zeta = 1) —— 临界阻尼
(zeta > 1) —— 过阻尼
(zeta = 0) —— 无阻尼
二阶系统单位阶跃响应
1. 欠阻尼的单位阶跃响应
其中
是一个稳态值为1的振荡衰减过程。
2. 无阻尼
为一个等幅振荡过程。
3. 临界阻尼
4. 过阻尼

欠阻尼二阶系统的性能分析
上升时间 (t_r)
令 (h(t) =1)得
其中 (omega_d=omega_nsqrt{1-zeta^2}) 被称为阻尼振荡频率。
( heta = arccoszeta) 称为阻尼角。
峰值时间 (t_p)
令 (frac{mathrm dh(t)}{mathrm dt} = 0)得
超调量
调节时间(从振荡开始到回归到一定误差范围内的正常值)
延迟时间
振荡次数
过阻尼系统的性能分析
上升时间
高阶系统的时域分析
当已知高阶系统的各个闭环极点后,可以将其化为以下形式:
实部为负的极点
越靠近虚轴,衰减速度越慢,对过渡过程的影响越大。
闭环极点约靠近虚轴,超调量越大;
二阶系统的单位斜坡响应
欠阻尼
临界阻尼
过阻尼
稳态分量恒为 (t-frac{2zeta}{omega_n})
二阶系统性能改善
(1)比例-微分控制
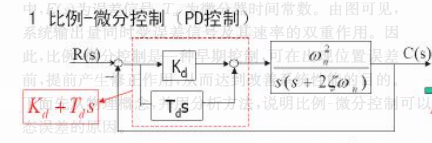
则闭环传递函数变为
使用比例-微分控制后,既可以减小系统在斜坡输入时的稳态误差,又可以使系统在阶跃输入时有满意的动态性能。
(2)测速反馈控制
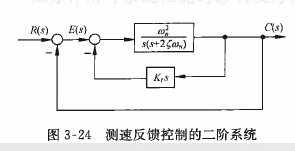
通过将输出的速度信号反馈到输入端,并与误差信号比较,可以增大系统阻尼,改善系统性能。
与微分-控制系统不同的是,测速反馈会降低系统的开环增益,从而加大系统在斜坡输入时的稳态误差。
3-5 线性系统的稳定性分析
稳定性是指系统在受到扰动下偏离原始状态,在扰动消失后恢复到原平衡状态的性能。
如果系统受到扰动后,无论初始偏差有多大,都能恢复到原始平衡状态,则这种系统称为大范围稳定的系统;如果初始偏差只在小于某一范围时才能恢复到初始平衡状态,则称这种系统为小范围平衡的系统。
稳定的充要条件
当且仅当系统的特征根全部具有负实部时,系统才具有稳定性;若有一个正实部根,不稳定;若有一个或一个以上零实部,则具有临界稳定性。
赫尔韦斯判定
劳斯判定
劳斯表的计算:对于上面的那个四元素矩阵:负对角线减去主对角线除以左下角的值。
劳斯判定的特殊情况
-
劳斯表中的某行的第一列项为零,而其余各项不为零,或不全为零
可以用因子 ((s+a)) 乘以原特征方程,其中 (a) 为任意正数。
-
劳斯表中出现全零行
根据上一行的系数构建一个辅助方程,求导后作为系数写入。
3-6 线性系统的稳态误差计算
误差的時域表达式为
如果 (sE(s)) 的极点均位于 (s) 左半平面(包括坐标原点),根据拉氏变换的终值定理,可方便地求出稳态误差
这里要注意拉普拉斯变换终值定理的应用条件:(sE(s)) 的全部极点位于 (s) 平面的左半平面。
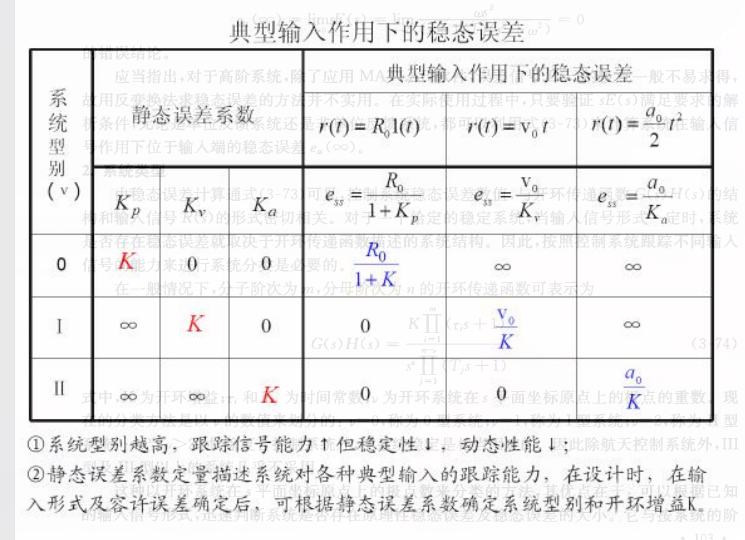
系统类型
在一般情况下,分子阶次为 m, 分母阶次为 n的开环传递函数为
其中 (K) 为开环增益
我们通过 (v) 的数值来称呼相应系统的类型,比如 (v = 0) 就是零型系统,(v=1)就是I型系统。
3-7 扰动作用下的稳态误差
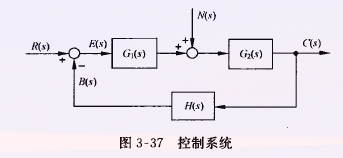
如图为有扰动作用下的信号流图
令输入 (R(s)=0),得扰动的传递函数
扰动输入的稳态误差