近期在接触Ros的时候遇到了一些问题,如何将rosbag中的信息提取出来进行进一步处理呢?
如三维点位置信息,视频信息(如果有的话)等等。
我采用的是MATLAB
读取bag信息
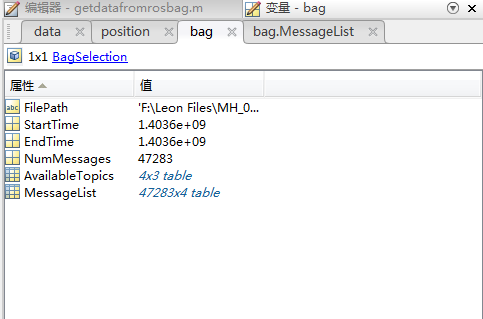
- filepath=fullfile('F:','Leon Files','MH_01_easy.bag')
- bag=rosbag(filepath)
对matlab中读取文件不熟悉的朋友可以参考我之前看到的一片不错的博文:
http://blog.sina.com.cn/s/blog_632947d60102uxo4.html
@亮亮的博客
点击工作区的bag,得到如下信息(针对我所使用的bag文件)
点击AvailableMessages可以看到bag中存在的信息,如下所示
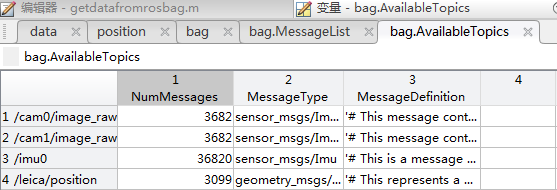
我要提取的是信息4,空间几何位置信息。所以我们要对信息进行选择。
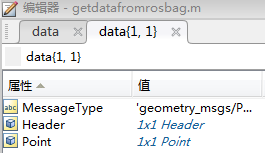
- geometry_message=select(bag,'MessageType','geometry_msgs/PointStamped')
- data=readMessages(geometry_message)
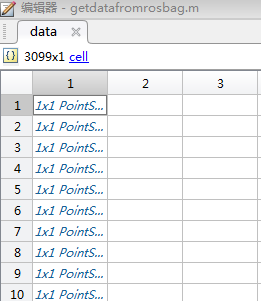
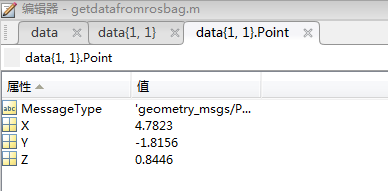
这里的point信息里面有x,y,z信息,下图显示的是X的信息。注意下图中4.7823上面的一行字:data{1,1}.Point.X,表示的是X的读取方式。
接下来我将建立一个三维数组,将所有数据读入position数组。
- position=zeros(3099,3);
- for i=1:3099
- position(i,1)=data{i,1}.Point.X;
- position(i,2)=data{i,1}.Point.Y;
- position(i,3)=data{i,1}.Point.Z;
- end
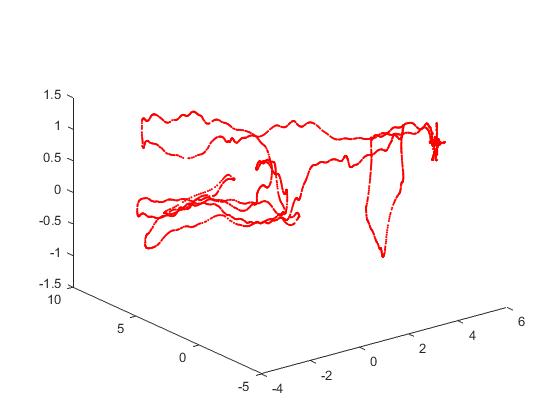
- for i=1:3099
- plot3(position(i,1),position(i,2),position(i,3),'r.','markersize',5);
- hold on
- end