排序(sorting)是算法家族里比较重要也比较基础的一类,内容也是五花八门了: 1、有“基于比较”的,也有“不基于比较”的; 2、*有迭代的(iterative)也有递归的(recursive); 3、有利用分治法(divide and conquer)思路解决的;(除了显而易见的“二路归并”算法,*“代入法(substitution method)”也是分治的一种,如快速排序/插入排序)
再进入正文之前,我想推荐大家一个很好的可以可视化学习算法的网站VisuALgo
判断算法的“好坏”,我们一般借助时间(空间)复杂度为依据,包括最好情况/最坏情况/和平均情况的复杂度。
| 排序方法 | 平均情况 | 最好情况 | 最坏情况 | 辅助空间 | 稳定性 |
|---|---|---|---|---|---|
| 冒泡排序 | O(n²) | O(n) | O(n²) | O(1) | 稳定 |
| 简单选择排序 | O(n²) | O(n²) | O(n²) | O(1) | 不稳定 |
| 直接插入排序 | O(n²) | O(n) | O(n²) | O(1) | 稳定 |
| 希尔排序 | O(nlogn)~O(n²) | O(nlogn) | O(n²) | O(1) | 稳定 |
| 堆排序 | O(nlogn) | O(nlogn) | O(nlogn) | O(1) | 不稳定 |
| 归并排序 | O(nlogn) | O(nlogn) | O(nlogn) | O(n) | 稳定 |
| 快速排序 | O(nlogn) | O(nlogn) | O(n²) | O(logn)~O(n) | 不稳定 |
1*、迭代的(iterative)与递归的(recursive)的区别 迭代(iterative)指循环反复执行某操作,由旧值递推出新值,每一次对过程的重复称为一次“迭代”,而每一次迭代得到的结果会作为下一次迭代的初始值; 递归(recursive)指程序在运行过程中直接或间接调用自己。递归算法要求有边界条件、递归前段和递归返回段。当边界条件不满足时,递归前进;当边界条件满足时,递归返回。 我们以阶乘(factorial)为例,看看两类算法是如何操作的:
#迭代iterative
def factorial(number):
product = 1
for i in range(number): #主体是循环
product = product * (i+1)
return product
m = factorial(5)
print(m)
#递归recursive
def factorial(number):
if number <= 1: #递归的边界条件(出口)
return 1
else:
return number * factorial(number-1) #调用自身
n = factorial(5)
print(n)我们来看一下两个算法运行过程:
对于这个问题来说,迭代比递归的时间效率更高。 不过在真正使用的时候,还需要根据情况讨论两类算法的优劣。
2*、分治法(devide and conquer)中的代入法(substitution method) 分治法,简而言之就是把大问题拆分成小问题,通过递归的求解小问题,最终得到大问题的解。
- 这里插上一小句,分治法与动态规划(Dynamic Programming)看上去很像,都是拆大问题为小问题求解,不过动态规划“更聪明”也更灵活,已求解的子问题会被保存起来,避免重复子问题的反复求解。 另外,动态规划与数学的递归分析法有着很深的渊源,算法的思路往往能够被表示成数组递归的等式。 代入法具体的做法与“数学归纳法”的思路不谋而合: 给出递推过程中第n+1项与第n项的关系; 从第0项开始将每一项的参数带入这个递推公式求解。 重点就在于这个适用于任一个阶段的“递推关系”的确定,这也是
神仙算法“快速排序”的精髓。
时间复杂度O(N²)的基于比较的排序算法
通过两两条目进行比较,决定是否将两个条目进行交换(swap)。 这类算法是最容易理解和应用的,但同时并不那么高效,它们的时间复杂度通常为O(N²)。
冒泡排序(Bubble Sort)
算法过程: 1、比较相邻的两个条目(a,b); 2、如果两个条目的大小关系与排序目标不符,则将两个条目交换;(假设我们想要建立升序序列) 3、重复以上两个步骤直到队尾; 4、这时,队尾条目就为队列中的最大值;这时我们再从步骤1开始重复,交换至倒数第二位;直到队列中所有条目都有序。 时间复杂度: 有内外两个循环,时间复杂度为O(N²)。
改进:提前终止的冒泡排序 如果在内层循环中没有进行交换,那么就意味着该队列已经有序,便可以终止排序操作。 因此对于一个已经有序的序列,其最好情况的时间复杂度为O(n)。 不过这一点改进并不能改变冒泡排序的
阶级属性平均时间复杂度。
简单选择排序 (Selection Sort)
算法过程: 1、在[i,N-1]范围内寻找最小的条目的位置X(初始时i=0); 2、将条目x与条目i交换; 3、将i加1,重复步骤1、2,直到所有条目有序。
void selectionSort(int a[], int N) {
for (int i = 0; i <= N-2; i++) { 外层循环 O(N)
int X = min_element(a+i, a+N) - a; //内层循环 O(N),找到最小条目的位置
swap(a[X], a[L]); // O(1) 而知也可能相等(并不真正交换)
}
}时间复杂度: 同样是内外两层循环,时间复杂度为O(N²)。
插入排序(Insertion Sort)
算法过程: 插入排序的算法思路很像我们在打牌时调整牌序的做法: 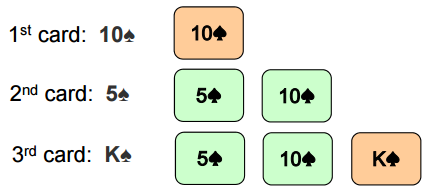
1、开始的时候手里只有一张牌; 2、拿到下一张牌,将牌放到手中牌组的合适位置; 3、每张牌都重复上面的步骤。
void insertionSort(int a[], int N) {
for (int i = 1; i < N; i++) { // 外层循环 O(N)
X = a[i]; // X 是将插入的对象
for (j = i-1; j >= 0 && a[j] > X; j--) //从后往前在已经有序的前i-1个条目中找到应当插入的位置
a[j+1] = a[j]; // 为X的插入腾出位置
a[j+1] = X; // 将X插入j+1位
}
}时间复杂度: 显然,外层循环的时间复杂度为O(N) 而内层循环的时间复杂度则与待排序序列的有序状况有关:
- 最好情况下,待排序序列已经是有序的,这时候内层循环压根不用找(待排序条目始终比已排序的最后一个条目大)所以这种情况下内层循环的时间复杂度为O(1);
- 最坏情况下,待排序序列是逆序的,这时候内层每次都要遍历到开头才能找到该插入的位置,这时内层循环的时间复杂度就为O(N); 综上而言,最好情况下的时间复杂度为O(N),最坏情况下为O(N²),平均情况下的时间复杂度为O(N²)。
时间复杂度O(NlogN)的基于比较的排序算法
归并排序(Merge Sort)
算法过程: 1、将两个条目分为一组,合并成为有序的长度为2的序列; 2、将两个已排序的长度为2的序列分为一组,合并成为有序的长度为4的序列; 重复该步骤... 3、最终,将两个已排序的长度为(N/2)的序列合并成为有序的长度为N的序列,排序完成。
以上只是大体的思路,去进一步了解归并排序,我们先从“合并”(merge)这个操作谈起: 从两个待合并序列的首部开始,边比较边向后移(取出两边指针所指的较小条目的到辅助队列中去,并将指针向后移一位)
void merge(int a[], int low, int mid, int high) {
// 子序列1 = a[low..mid], 子序列2 = a[mid+1..high], 都是有序的
int N = high-low+1;
int b[N]; // 一个辅助数组
int left = low, right = mid+1, bIdx = 0; //初始化子序列和辅助序列的指针
while (left <= mid && right <= high) // 合并过程
b[bIdx++] = (a[left] <= a[right]) ? a[left++] : a[right++];
while (left <= mid) b[bIdx++] = a[left++]; // 处理余下的部分
while (right <= high) b[bIdx++] = a[right++]; // 处理余下的部分
for (int k = 0; k < N; k++) a[low+k] = b[k]; // 将辅助数组中的内容粘贴回去
}以上就是归并排序算法的灵魂核心所在了。 还记得之前提到过的“分治法”(Divide and Conquer)吗? 将大问题拆分正小问题,通过解决小问题递归的解决大问题。
归并排序就是一个典型的利用“分治法”思路的算法: “分”的过程很容易:将待排序的序列一分为二,一直分到不能再分(单个条目),再通过迭代的思路回溯着求解; “治”的部分就是我们刚刚介绍的合并(merge)的过程。
完整算法过程:
void mergeSort(int a[], int low, int high) {
// 待排序的序列是a[low..high]
if (low < high) { // 迭代的出口是单个条目或空(low>=high)
int mid = (low+high) / 2;
mergeSort(a, low , mid ); // 将序列一分为二,迭代求解(recursive)
mergeSort(a, mid+1, high);
merge(a, low, mid, high); // “治”的部分,合并子序列
}
}时间复杂度:
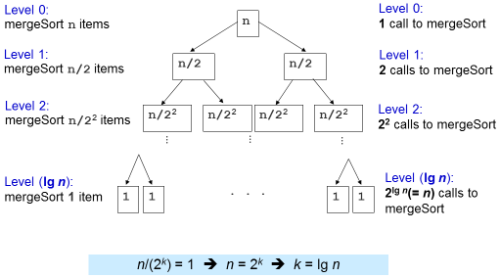
对于每一次长度为k的序列的合并(merge)操作来说,它的时间复杂度是O(k)。(最多有k-1次比较,当两个待合并的序列正好“镶嵌”时) 由上图可知,在第k层,每一个待合并的序列长度为n/(2^(k-1)),需要执行合并的次数为2^(k-1)。 所以可以得到,在第k层,合并的总的时间复杂度为O[N/(2^(k-1))]*O[2^(k-1)] = O(N); 易知该归并树一共有logN层,所以可得归并排序总的时间复杂度为O(NlogN)。
归并排序的一个很大优点就是,无论待排序的序列情况如何,其时间复杂度都是O(NlogN)。 这种性质使得其适用于大规模的排序。(NlogN的增长速度远小于N²)
不过,归并排序也有一些弱势的部分: 1、算法稍显复杂;(不过我们也不需要从底层写起(from scratch)) 2、需要O(N)的空间复杂度(一个辅助队列),使得这个算法不是就地算法。
快速排序(Quick Sort)
快速排序也是一个使用“分治法”思路的算法。 算法过程: 我们用“分治法”的思路来分析算法: “分”的部分: 选择一个条目p(相当于一个中央标杆) 然后将待排序序列a[i...j]分为三部分:a[i...m-1],a[m],a[m+1...j]
- a[i...m-1](可能为空)中的条目都小于刚才选定的标杆a[p]的值;
- a[m]的值为标杆的值(可以认为这里是把标杆a[p]移动到了排序后正确的位置上)
- a[m+1...j](可能为空)中的条目都大于标杆的值。 接下来,将该过程应用在左右这两个子序列中,迭代下去。
“治”的部分: ...什么都不做。
是不是感觉和之前讨论的“归并排序”完全相反呢?
我们先从重要的“分”的部分(经典版本)开始讨论: 为了分隔a[i...j],我们先选择a[i]作为中央标杆p。 余下的元素被分到到三个区域: ① S1 = a[i+1...m] 其中元素都 < p; ② S2 = a[m+1...k-1] 其中元素 ≥ p; ③ 未知区域 = a[k...j] 尚未分配至S1/S2。
初始时,S1区和S2区都是空的;即除了p自身,所有的元素都在“未知区域”中。 对于每一个在未知区域中的元素a[k],我们将其与p比较,决定其分到S1还是S2。
先通过图片来对“分组”的操作有一个直观的认识:
情况一:a[i] ≥ p
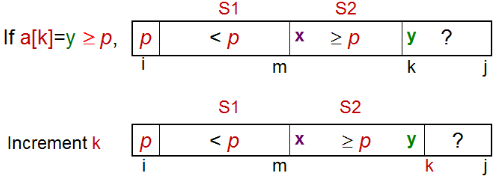
情况二:a[i] < p
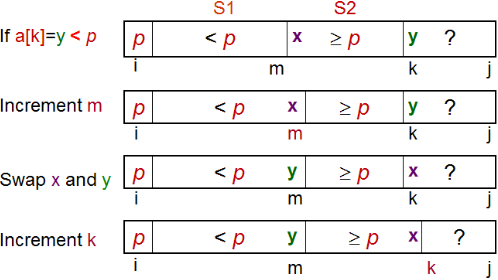
算法实现:
int partition(int a[], int i, int j) {
int p = a[i]; // 选择a[i]作为中心轴
int m = i; // S1和S2初始情况下都是空的
for (int k = i+1; k <= j; k++) { // 遍历未知区域
if (a[k] < p) { // 情况2
m++;
swap(a[k], a[m]);
} // 对于情况1: a[k] >= p,仅仅k++,无额外操作
}
swap(a[i], a[m]); // 最后一步,将a[m]与a[i]交换,将中心轴放在最终位置
return m; // 返回p最终位置的下标
}
void quickSort(int a[], int low, int high) {
if (low < high) {
int m = partition(a, low, high); // 时间复杂度 O(N)
// m为low最终的位置
quickSort(a, low, m-1); // 迭代求解左边分组
quickSort(a, m+1, high); // 迭代求解右边分组
}
}复杂度分析: 首先,分析每一次“分组”(partition)的复杂度: 对于partition(a,i,j),只需要递归执行(j-i)次(将未分组的条目一一分组),所以它的时间复杂度是O(N)。
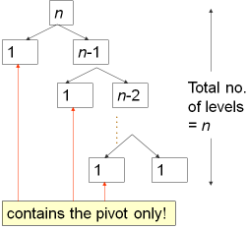
最坏的情况下,即如果序列本来就是有序的,那么每次都选择第一个条目作为“中心轴”的结果就是,分组的左半边只有p(x≤p),而余下的条目都在右半边(x>p)。 这种情况下一共需要执行n-1次“分组”的操作。总的时间复杂度为O(N²)。
而最好的情况下,每一次选择的p都能够将序列分为相等大小的两部分。 这种情况下,递归的深度只有O(logN)(与归并排序相类似),每一层的时间复杂度为O(N),得到总的时间复杂度为O(NlogN)。
随机快速排序(Random Quick Sort)
随机快速排序与快速排序不同的一点就是,相对于从“固定”的位置选择p(比如一直选择起始部分的元素作为p),p的选择是随机的。
为什么这个随机快速排序的时间复杂度为O(NlogN)呢?解释起来可能稍显繁琐,不过我们可以建立一种直观的感受: 如果是随机选择p的话,我们遇到极端情况的概率(完全正序)就会很小,(可以把它想象成符合一种温和的正态式的随机分布)那么这种“较好情况”和“较差情况”碰撞叠加相平均,结果便会得到O(NlogN)的时间复杂度。
不基于比较的排序算法
基于比较的排序算法时间复杂度的下限为O(NlogN),也就是说,能够做到最坏情况的时间复杂度也为O(NlogN)的算法就可以被视作最优算法了。
然而,如果使用不基于比较的排序方法,我们可以“变得更快”,甚至达到O(N)的时间复杂度。(不过待排序列需要满足一些前提条件)
计数排序(Counting Sort)
前提条件:如果待排序的序列为小范围内的整型数(Integer),我们只需记下每个整型数出现的频次,再按序输出就行了。
例如,待排序序列的范围是[1,9],只需要记录下“1”出现了多少次,“2”出现了多少次……再按从1到9的顺序输出就行了。
基数排序(Radix Sort)
前提条件:待排序的序列可以是较大范围的整型数,但是位数不能太大。
基数排序又被称为“桶子法”(Bucket Sort)。在基数排序中,我们将每个待排序的数视作一个 w 长的字符串(如果长度不够可以在前面添零)
① 先从最右位(最小位)开始,将待排序的数根据最小位的数值分到(0~9)这十个“桶子”中去,再从“0号桶”开始,依次将每个桶子中的数取出来,排成一个最小位有序的序列。 ② 接着,根据倒数第二位的数值,“依序”将各数再次分到十个“桶子”中去,然后将每个桶子中的数取出排列成新的序列。(注意取出的时候要维持放入桶中的顺序)这个时候得到就是后两位有序的序列了。 ③ 重复这个操作,直到最左位,便可得到有序的数列了。
不难看出,这个排序方法是“稳定”的。其时间复杂度为O(w*(N+k))
“放”的时间复杂度为O(N),“取”的时间复杂度为O(k)(这里指有k个“桶”),一共需要操作w次(共有w位)。
堆排序(Heap Sort)
背景知识 堆有以下两个性质:
- 是一棵完全二叉树(就是只有最下一层的右侧可为空的满二叉树)
- 堆中某个节点的值总是不大于(大根堆)或不小于(小根堆)其父节点的值
一个完全二叉树能够被存储成为一个数列A(从根节点开始,层序遍历入队),由此一来,我们能够很容易得到节点之间的关系: 1、父节点 parent(i) = i>>1 (1/2) 2、左子节点 left(i) = i<<1 (i2) 3、右子节点 right(i) = i<<1 + 1 (i2+1)
一般步骤
1、初始建成一个大根堆; 2、将堆顶元素取出,并将堆末尾(对应的数列的末尾元素)移至堆顶处; 3、调整堆中的元素位置,再次构成大根堆,回到第一步,直到所有元素被取出。
添加元素 insert(v)
为了保证堆的完全二叉树的特性,添加元素只能在末尾添加。 添加元素之后,可能会破坏堆的顺序,因此要进行相应的交换调整。 时间复杂度为O(logN)
初始化堆 heapify()
有两种时间复杂度不同的初始方式:
- siftUp: O(NlogN)初始为空,每在末尾添加一个元素,都要进行交换排序;
- siftDown:O(N)初始是一个没有经过排序的二叉树,在其基础上进行排序调整;
从直观上看一下这两种初始化方式的时间复杂度区别:
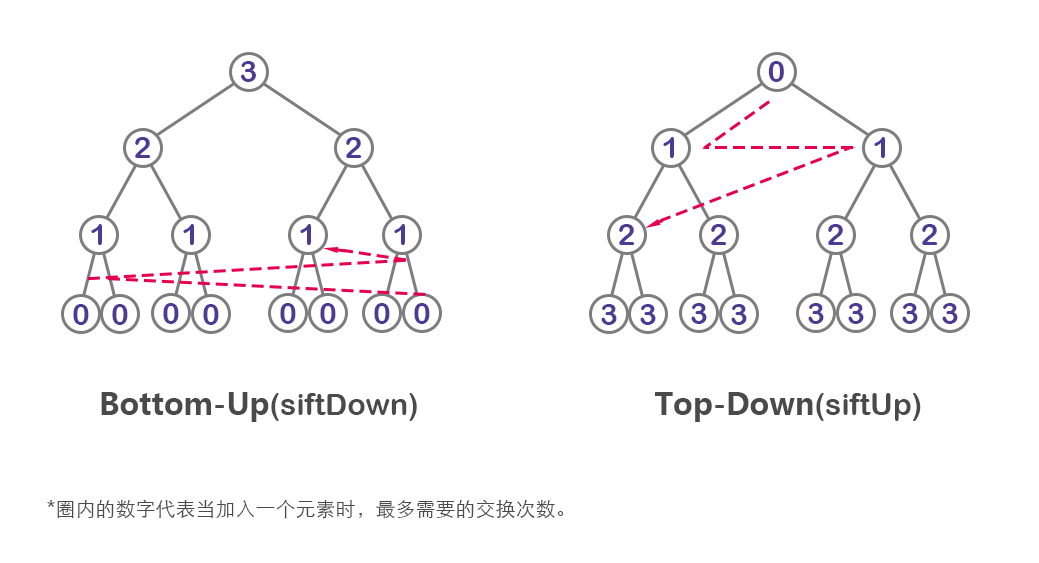
- siftUp的每添加一个元素,相当于在当时的高度h上进行了一次顺序调整;然而这个高度h随着元素的添加在不断升高,高度越高,调用“调整”的次数就越多,“调整”的时间复杂度近似向最末层的时间复杂度O(logN)靠拢,故总的时间复杂度为O(NlogN);
- 而siftDown与之相反,需要“调整”的次数由下层至上层递增,“调整”的时间复杂度像下靠拢(O(1)),得到总的时间复杂度为O(N)。
调整 siftDown()
在元素数为K时,可得其调整的时间复杂度为O(h) = O(logK) 因为底层的元素较多,所以我们可以认为整体的时间复杂度向下靠拢(O(logN)) 因此可以得到堆排序的总的时间复杂度为O(N)[初始堆]+O(NlogN)[调整] = O(NlogN)