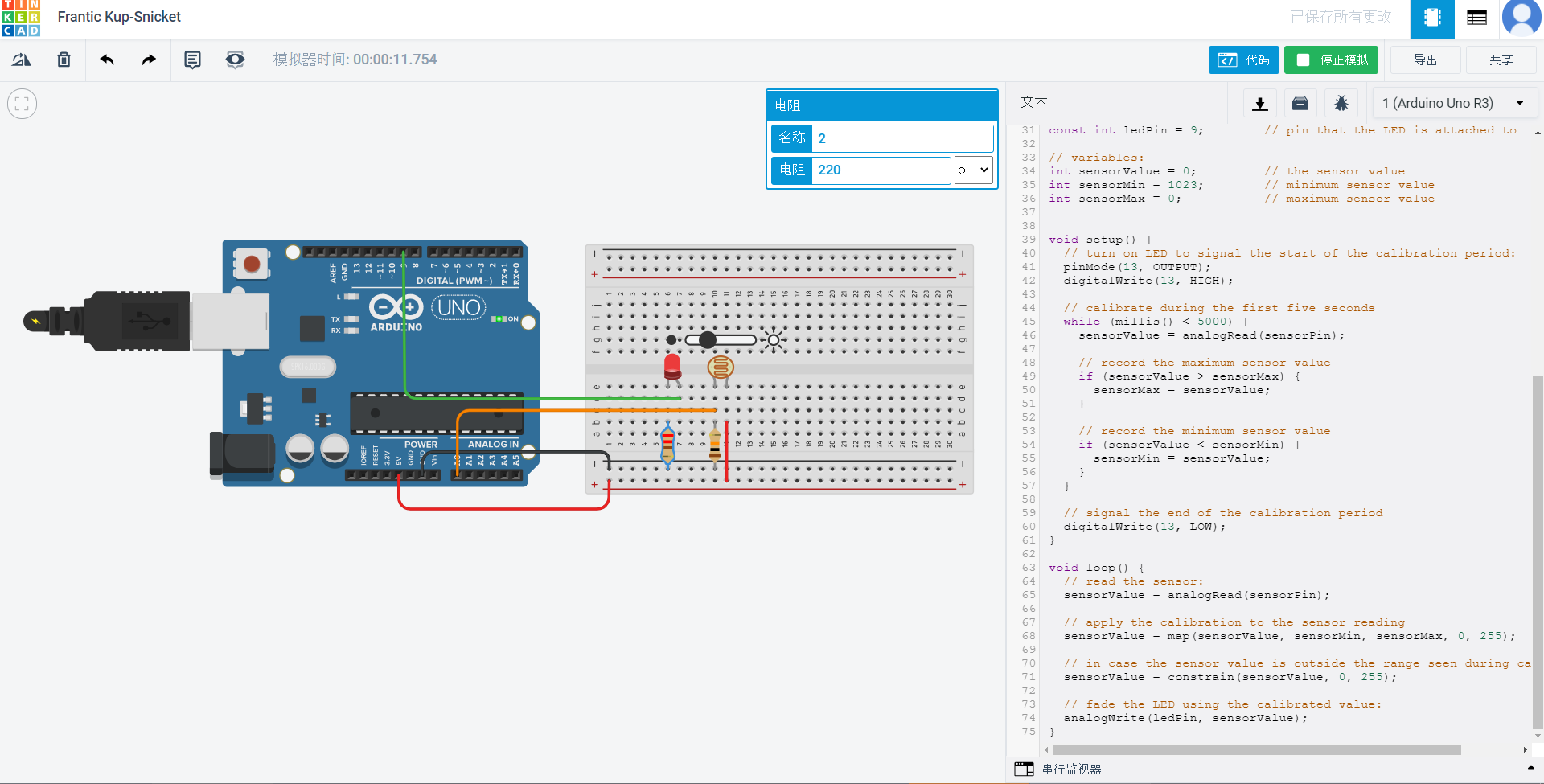
/* Calibration 校准 Demonstrates one technique for calibrating sensor input. The sensor readings during the first five seconds of the sketch execution define the minimum and maximum of expected values attached to the sensor pin. 演示了一种用于校准传感器输入的技术。 传感器读取光敏电阻前五秒内的读数 定义了连接到传感器的引脚的最小值和最大值。 The sensor minimum and maximum initial values may seem backwards. Initially, you set the minimum high and listen for anything lower, saving it as the new minimum. Likewise, you set the maximum low and listen for anything higher as the new maximum. 传感器的最小和最大初始值似乎向后。 最初,您设置了最低的高音并聆听任何声音 降低,将其另存为新的最小值。 同样,您将 最大低,并听取任何新的最大。 The circuit: * Analog sensor (potentiometer will do) attached to analog input 0 * LED attached from digital pin 9 to ground 电路: *模拟传感器(电位计可用)连接到模拟输入0 * LED从数字引脚9接地 * * created 29 Oct 2008 By David A Mellis modified 30 Aug 2011 By Tom Igoe http://www.arduino.cc/en/Tutorial/Calibration This example code is in the public domain. */ // These constants won't change: const int sensorPin = A0; // pin that the sensor is attached to const int ledPin = 9; // pin that the LED is attached to // variables: int sensorValue = 0; // the sensor value int sensorMin = 1023; // minimum sensor value int sensorMax = 0; // maximum sensor value void setup() { // turn on LED to signal the start of the calibration period: pinMode(13, OUTPUT); digitalWrite(13, HIGH); // calibrate during the first five seconds while (millis() < 5000) { sensorValue = analogRead(sensorPin); // record the maximum sensor value if (sensorValue > sensorMax) { sensorMax = sensorValue; } // record the minimum sensor value if (sensorValue < sensorMin) { sensorMin = sensorValue; } } // signal the end of the calibration period digitalWrite(13, LOW); } void loop() { // read the sensor: sensorValue = analogRead(sensorPin); // apply the calibration to the sensor reading sensorValue = map(sensorValue, sensorMin, sensorMax, 0, 255); // in case the sensor value is outside the range seen during calibration sensorValue = constrain(sensorValue, 0, 255); // fade the LED using the calibrated value: analogWrite(ledPin, sensorValue); }