在运用ros进行3D建模过程中对其坐标系的建立有不解,所以今天了解了一下
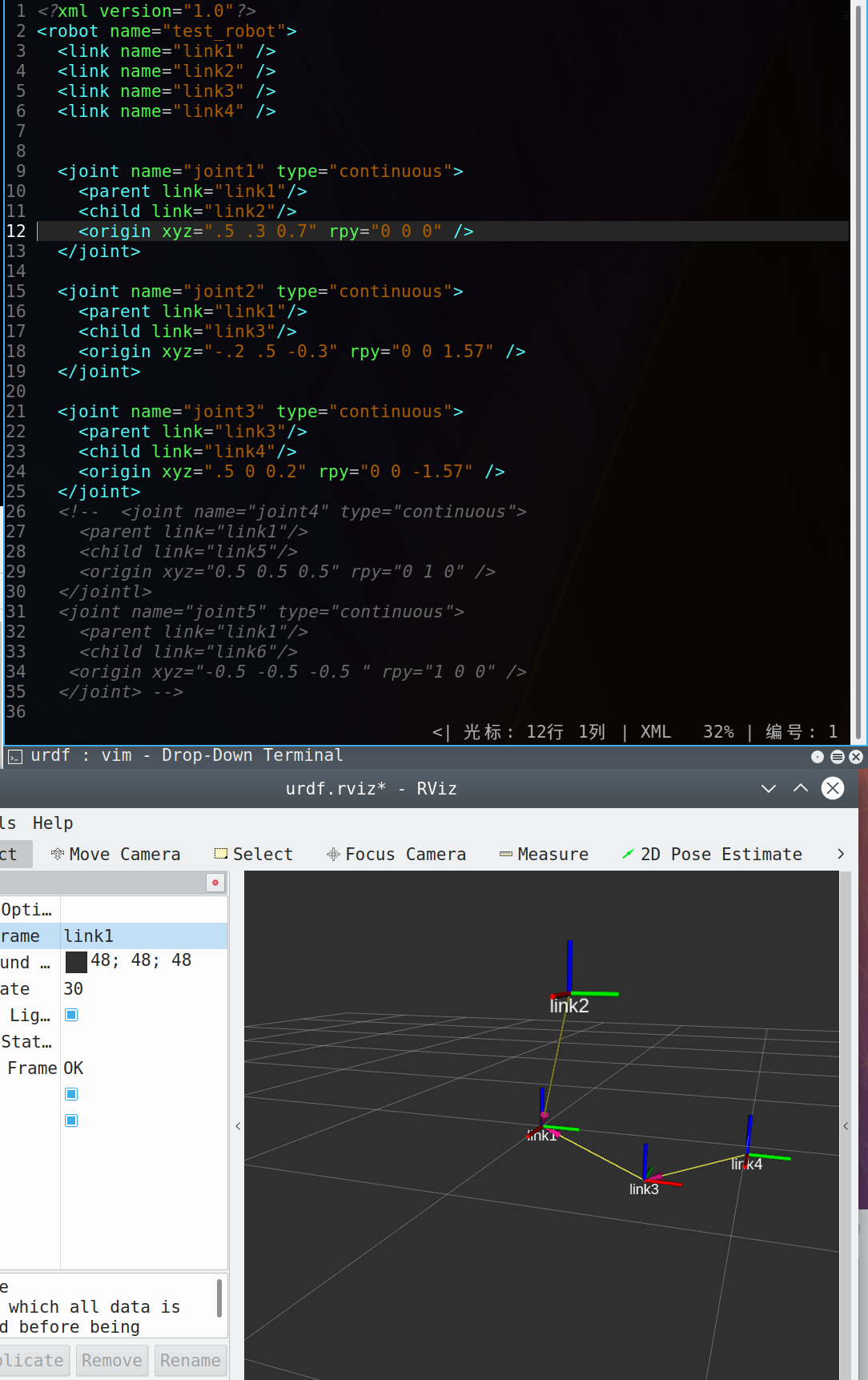
结合图中代码和模型可以看出红色为x轴,绿色为y轴,蓝色为z轴
代码中标签 <origin xyz=".5 .3 0.7" rpy="0 0 0">
其中xyz即以link1为原点按坐标进行移动,绕x轴滚动(Roll), 绕y轴旋转称为俯仰(Pitch), 绕z轴旋转称为偏转(Yaw)
并且测试过程中可以观察到关节默认都是围x轴旋转
看代码joint2和joint3和模型可知 数值是弧度1.57即90度, 且是绕z轴
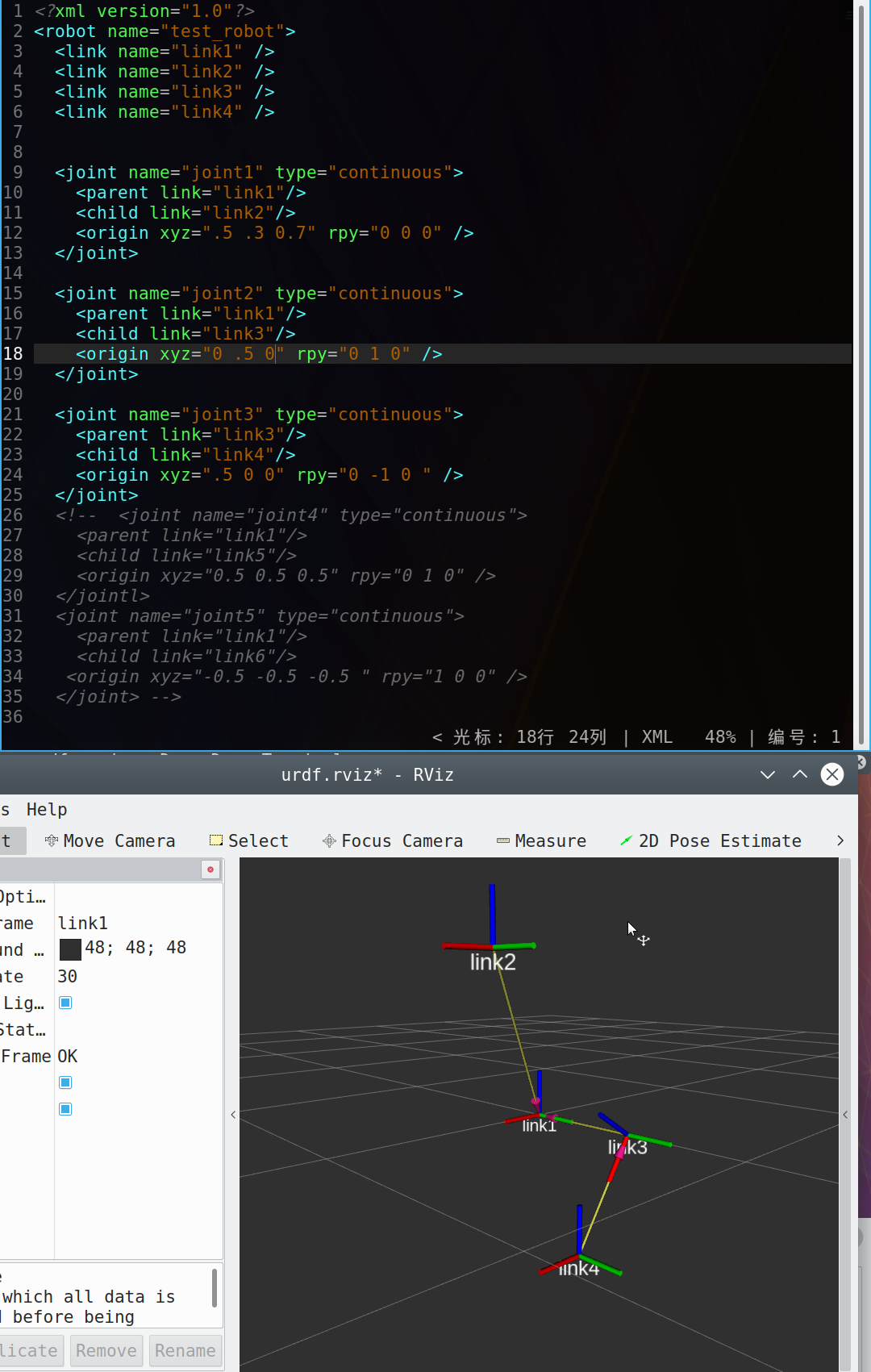

由上图可以看到当joint2发生滚动后子连杆link3坐标轴发生变换并且link3的子连杆link4坐标轴也发生变化
可以看出连杆的动作都是以子连杆根据关节的设置进行的
关节和连杆的坐标设置相互不影响,栏杆的动作都是以关节的坐标为基准
https://blog.csdn.net/sunbibei/article/details/52297524
https://blog.csdn.net/bbtang5568/article/details/105329049