数据结构-图
概念
定义
- 图G由点集V和边集E组成,记为G=(V,E)。
- 点集不能为空,边集可以为空。
- |V|,(V=v_1,cdots,v_n)表示图点的个数,也称为图的阶。
- |E|,(E={(u,v),uin V,vin V})表示图边的个数。
有向图
- 弧是点的有序对,记做<v,u>。
- <v,u>中,v 为弧尾,w 为弧头,称点 v 到点 u 的弧,或 v 邻接到 u。
无向图
- 边是点的无序对,记做(v,u)或(u,v)。
- (v,u)中,称 v 和 u 互为邻接。
分类
简单图,图G满足:
- 不存在重复边。
- 不存在点到自身的边。
多重图,非简单图即为多重图。
属性
路径,点 u 到 点 v 的路是,u,a,b,c,d,...,v 的一个点序列。
路径长度,路径上边的个数。
回路(环),路径中,第一个点和最后一个点相同。
简单路径,路径中,点序列不重复。
简单回路,回路中,点序列不重复。
距离,点 u 到 点 v 的最短路径。若不存在则路径为无穷大(∞)。
子图,有两个图 G=(V,E) 和 G'=(V',E'),(V'in V,E'in E) 则 G' 是 G 的子图。
生成子图,子图满足 V(G')=V(G)。
生成树,连通图中包含所有点的一个极小连通子图。
- 若图中点为 n 则其生成树有 n-1 条边。
生成森林,非连通图中所有连通分量的生成树。
带权图(网),边上有数值的图。
无向图属性
完全图或简单完全图,无向图中,任意两个点都存在边。
- 无向完全图中,n 个点有 n(n-1)/2 条边。
连通,无向图中,点 v 到 点 u 之间有路径存在,则 v,w 是连通的。
连通图,图中任意两点都连通。
连通分量,非连通图中的极大连通子图为连通分量。
- 若一个图有 n 个点,但是只有 n-1 条边,那么必为非连通图。
点的度,与该点相连边的个数。记为TD(V)。
- 无向图全部点的度之和等于边数量的两倍,因为每条边与两个点相连。
有向图属性
有向完全图,在有向图中,任意两个点之间都存在方向相反的弧。
- 有向完全图中,n 个点 n(n-1) 条边。
强连通、强连通图、强连通分量,有向图中与无向图相对的概念。
出度,入度,出度为是以点为起点的弧的数量,记为 ID(v)。入度是以点为终点的弧的数量记为 OD(v)。TD(v)=ID(v)+OD(v)。
- 有向图全部点的出度之和与入度之和等于弧的数量。
存储
邻接矩阵
概念
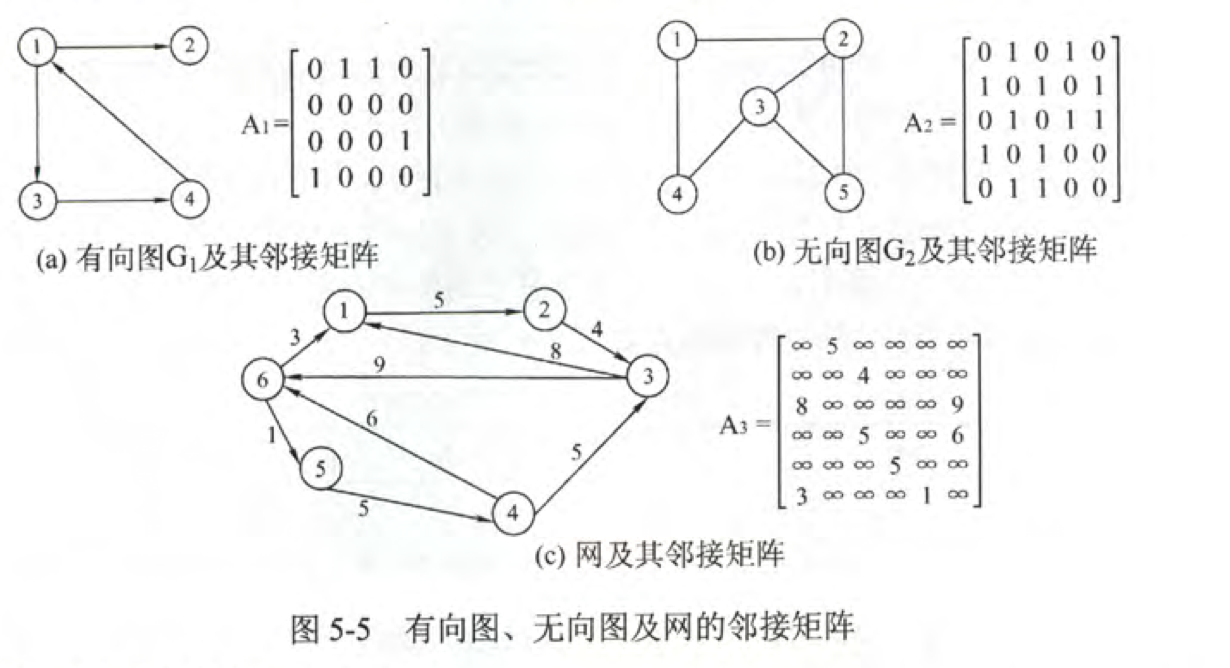
邻接矩阵即使用一个矩阵来记录点与点之间的连接信息。
对于结点数为 n 的图 G=(V,E)的邻接矩阵A 是 nxn 的矩阵。
- A[i][j]=1,若(vi,vj)或<vi,vj>或(vi,vj)是E(G)中的边。
- A[i][j]=1,若(vi,vj)或<vi,vj>或(vi,vj)不是E(G)中的边。
对带权图而言,若顶点vi,vj相连则邻接矩阵中存着该边对应的权值,若不相连则用无穷大表示。
- A[i][j]=(w_{ij}),若(vi,vj)或<vi,vj>或(vi,vj)是E(G)中的边。
- A[i][j]=0或∞,若(vi,vj)或<vi,vj>或(vi,vj)不是E(G)中的边。
定义
# define MAXSIZE
typedef struct {
int vexs [MAXSIZE];
int edges[MAXSIZE][MAXSIZE];
int vexnum, arcnum; // 点和边的数量
}MGraph;
性质
- 无向图的邻接矩阵为对称矩阵,可以只用上或下三角。
- 对于无向图,邻接矩阵的第 i 行(列)非零元素的个数正好是第 i 个顶点的度 。
- 对于有向图,邻接矩阵的第 i 行(列)非零元素的个数正好是第 i 个顶点的出度(入度)。
- 邻接矩阵容易确定点之间是否相连,但是确定边的个数需要遍历。
- 稠密图适合使用邻接矩阵。
邻接表
概念
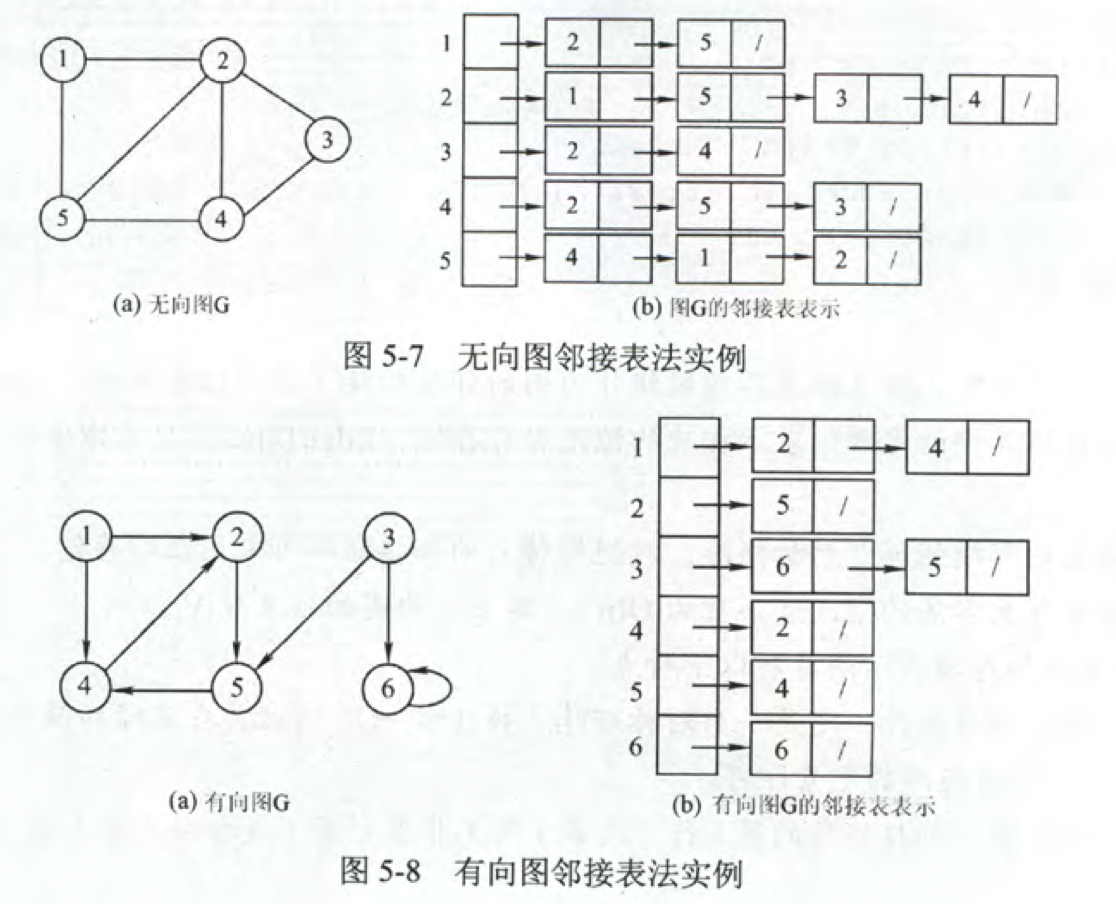
对每个顶点建立一个单链表,然后所有顶点的单链表使用顺序存储。
顶点表由顶点域(data)和指向第一条邻边的指针(firstarc)构成。
边表,由邻接点域(adjvex)和指向下一条邻接边的指针域(nextarc)构成。
定义
typedef struct ArcNode{ // 边结点
int adjvex; // 边指向的点
struct ArcNode *next; //指向的下一条边
}ArcNode;
typedef struct VNnode{ //顶点节点
int data;
ArcNode *first;
}VNode, AdjList[MAX]
typedef struct { //邻接表
AdjList vertices;
int vexnum, arcnum;
} ALGraph;
性质
- 若G为无向图,则所需的存储空间为O(|V|+2|E|),若G为有向图,则所需的存储空间为O(|V|+|E|)。前者倍数是后者两倍是因为每条边在邻接表中出现了两次。
- 邻接表法比较适合于稀疏图。
- 点找边很容易,点找边不容易。
- 邻接表的表示不唯一
十字链表
概念
有向图的一种表示方式。
十字链表中每个弧和顶点都对应有一个结点。
- 弧结点:tailvex, headvex, hlink, tlink, info
- headvex, tailvex 分别指示头域和尾域。
- hlink, tlink 链域指向弧头和弧尾相同的下一条弧。
- info 指向该弧相关的信息。
- 点结点:data, firstin, firstout
- 以该点为弧头或弧尾的第一个结点。

定义
typedef struct ArcNode{
int tailvex, headvex;
struct ArcNode *hlink, *tlink;
//InfoType info;
} ArcNode;
typedef struct VNode{
int data;
ArcNode *firstin, *firstout;
}VNode;
typeder struct{
VNode xlist[MAX];
int vexnum, arcnum;
} GLGrapha;
邻接多重表
概念
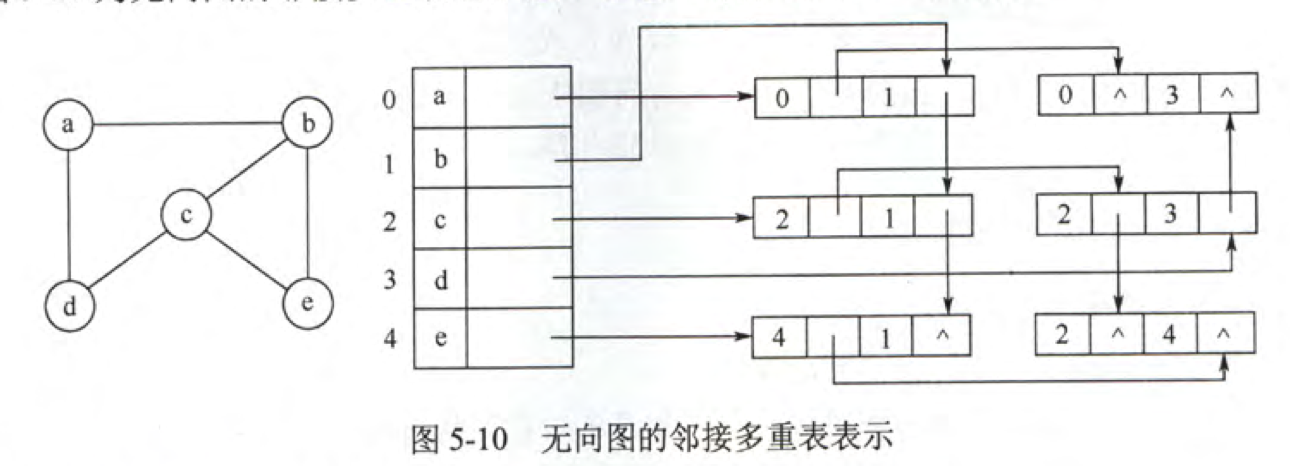
邻接多重表是无向图的一种链式存储方式。
边结点:
- mark 标志域,用于标记该边是否被搜索过。
- ivex, jvex 该边的两个顶点所在位置。
- ilink 指向下一条依附点 ivex 的边。
- jlink 指向下一条依附点 jvex 的边。
- info 边相关信息的指针域。
点结点:
- data 数据域
- firstedge 指向第一条依附于改点的边。
邻接多重表中,依附于同一点的边串联在同一链表中,由于每条边都依附于两个点,所以每个点会在边中出现两次。
定义
typedef struct ArcNode{
bool mark;
int ivex, jvex;
struct ArcNode *ilink, *jlink;
// InfoType info;
}ArcNode;
typedef struct VNode{
int data;
ArcNode *firstedge;
}VNode;
typedef struct {
VNode adjmulist[MAX];
int vexnum, arcnum;
} AMLGraph;
基本操作
Adjacent(G,x,y),判断图是否存在边(x,y)或<x,y>。Neighbors,列出图中与 x 邻接的边。InsertVertex(G,x),在图中插入顶点 x。DeleteVertex(G,x),在图中删除顶点 x。AddEdge(G,x,y),如果(x,y)或<x,y>不存在,则添加。RemoveEdge(G,x,y),如果(x,y)或<x,y>存在,则删除。FirstNeighbor(G,x),求图中顶点 x 的第一个邻接点。存在返回顶点号,不存在返回-1。NextNeighbor(G,x,y),返回除x的的下一个邻接点,不存在返回-1;GetEdgeValue(G,x,y),获得(x,y)或<x,y>的权值。SetEdgeValue(G,x,y),设置(x,y)或<x,y>的权值。
遍历
广度优先
广度优先搜索(BFS)有点类似于二叉树的层序遍历算法。从某个顶点 v 开始遍历与 v 邻近的 w1,w2,3...,然后遍历与 w1,w2,3...wi 邻近的点。
由于 BFS 是一种分层的搜索算法,所以必须要借助一个辅助的空间。
//初始化操作
bool visited[MAX];
for(int i=0;i<G.vexnum;i++) visited[i]=FALSE;
void BFSTraverse(Graph G){
InitQueue(Q);
for(int i=0;i<G.vexnum;i++){
if(!visited[i])
BFS(G, i);
}
}
void BFS(Graph G, int v){
visit(v);
visited[v]=TRUE;
Enqueue(Q,v);
while(!isEmpty(Q)){
Dequeue(Q,v);
for(w=FirstNeighbor(G,v);w>=0;w=NextNeighbor(G,v,w)){
if(!visited[w]){
visit[w];
visited[w]=TRUE;
EnQueue(Q,w);
}
}
}
}
时间复杂度分析:
邻接表:O(|V|+|E|)
邻接矩阵:O(|V|^2)
深度优先
//初始化操作
bool visited[MAX];
for(int v=0;v<G.vexnum;v++) visited[v]=FALSE;
void DFSTraverse(Graph G){
for(int v=0;v<G.vexnum;v++){
if(!visited[v])
DFS(G,v);
}
}
void DFS(Graph G,int v){
visit(v);
visited[v]=TRUE;
for(w=FistNeighbor(G,v);w>=0;w=NextNeighbor(G,v,w))
if(!visited[w])
DFS(G,w)
}
最小生成树
一个连通图的生成树是图的极小连通子图,即包含图中所有顶点,且只包含尽可能少的边的树。
对于一个带权的连通图,生成树不同,对应的权值也不同,权值最小的那棵生成树就是最小生成树。
对于最小生成树,有如下性质:
- 最小生成树不唯一,但是对应的权值唯一。
- 边数为顶点数减一。
构造最小生成树有多种算法,但是一般会用到以下性质:
若 G 是一个带权连通无向图,U 是 点集 V 的一个非空子集。若(u,v)其中 u∈U,v∈V-U,是一条具有最小权值的边,则必定存在一棵包含边(u,v)的最小生成树。
通用算法如下:
MST(G){
T=NULL;
while T未形成生成树;
do 找到一条最小代价边(u,v)且加入 T 后不会产生回路;
T=T∪(u,v)
}
Prim
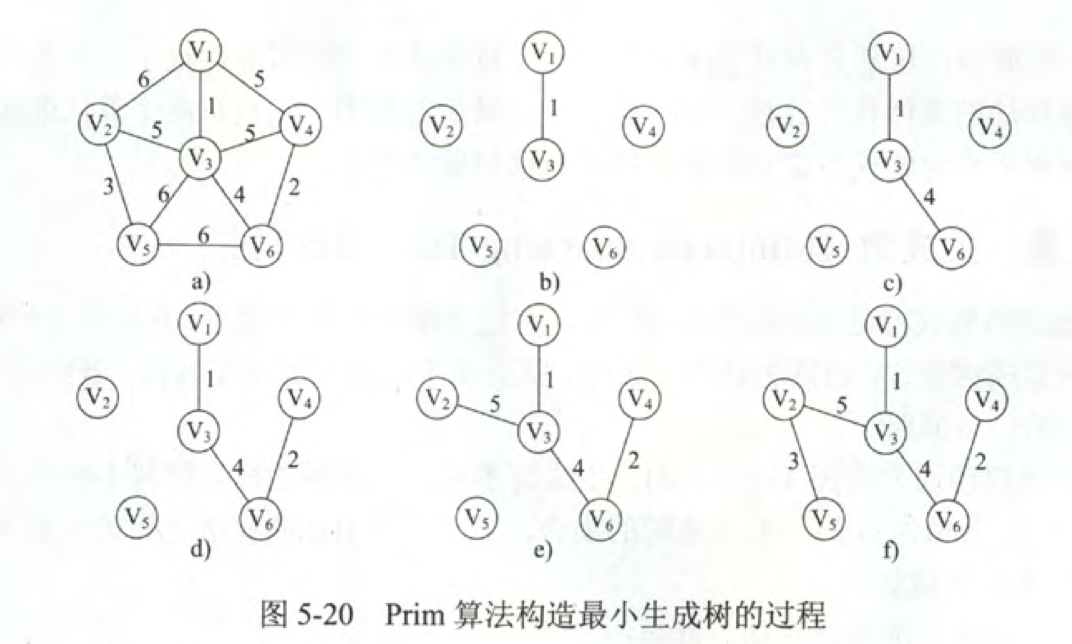
Prim算法的执行非常类似于寻找图最短路径的Dijkstra算法。
从某个顶点出发遍历选取周围最短的边。
//伪代码描述
void Prim(G,T){
T=∅;
U={w}; //w为任意顶点
while((V-U)!=∅){
找到(u,v),u∈U,v∈(V-U),且权值最小;
T=T∪{(u,t)};
U=U∪{v}
}
}
以邻接矩阵为例:
void Prim(MGraph G)
{
int sum = 0;
int cost[MAXSIZE];
int vexset[MAXSIZE];
for(int i=0;i<G.vexnum;i++) cost[i]=G.edges[0][i];
for(int i=0;i<G.vexnum;i++) vexset[i] = FALSE;
vexset[0]=TRUE;
for(int i=1;i<G.vexnum;i++)
{
int mincost=INF;
int minvex;
int curvex;
for(int j=0;j<G.vexnum;j++)
{
if(vexset[j]==FALSE&&cost[j]<mincost)
{
mincost=cost[j];
minvex=j;
}
vexset[minvex]=TRUE;
curvex = minvex;
}
sum+=mincost;
for(int j=0;j<G.vexnum;j++)
if(vexset[j]==FALSE&&G.edges[curvex][j]<cost[j])
cost[j]=G.edges[curvex][j]
}
}
Prim算法的复杂度为O(|V|^2)不依赖于|E|,所以适合于边稠密的图。
构造过程:
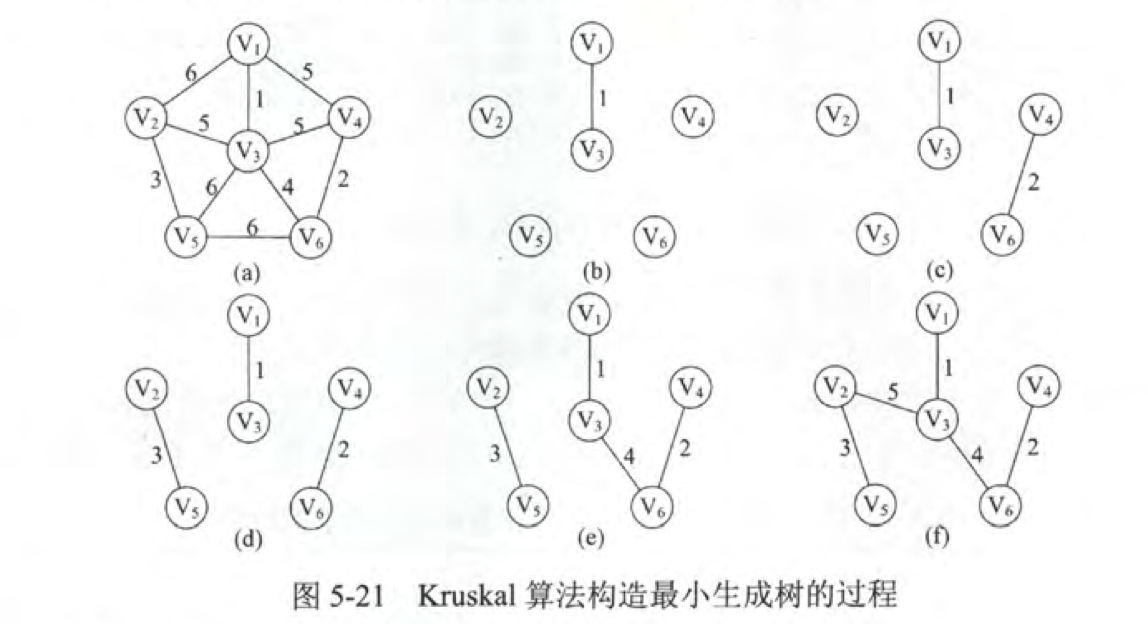
kruskal
kruskal所做的事情跟prim是反过来的,kruskal算法对边进行排序,依次选出最短的边连到顶点上。
//伪代码描述
void Kruskal(V,T){
T=V;
numS=n; //连通分量数
while(nums>1){
从E选出权值最小的边(v,u);
if(v和u属于T中不同的连通分量){
T=∪{(v,u)};
nums--;
}
}
}
同样以邻接矩阵为例。
typedef struct
{
int v1,v2;
int w;
} Road;
Road road[MAXSIZE];
int v[MAXSIZE];
int getRoot(int x)
{
while(x!=v[x]) x=v[x];
return x;
}
void Kruskal(MGraph G, Road road[])
{
int sum=0;
for(int i=0;i<G.vexnum;i++) v[i]=i;
sort(road,G.arcnum);
for(int i=0;i<G.arcnum;i++)
{
int v1=getRoot(road[i].v1);
int v2=getRoot(road[i].v2);
if(v1!=v2)
{
v[v1]=v2;
sum+=road[i].w;
}
}
}
kruskal算法的复杂度为O(|E|log|E|)适合边少点多的图。
构造过程:
最短路径
最短路径算法一般会利用最短路径的一条性质,即:两点间的最短路径也包含了路径上其他顶点间的最短路径。
Dijkstra
Dijkstra 算法一般用于求单源最短路径问题。即一个顶点到其他顶点间的最短路径。
这里我们需要用到三个辅助数组:
dist[vi],从 v0 到每个顶点 vi 的最短路径长度。path[vi],保存从 v0 到 vi 最短路径上的前一个顶点。set[],标记点是否被并入最短路径。
执行过程:
- 初始化:
- 选定源点 v0。
- dist[vi]:若 v0 到 vi 之间若存在边,则为边上的权值,否则为∞。
- path[vi]:若 v0 到 vi 之间存在边,则 path[vi]=v0,否则为-1。
- set[v0]=TRUE,其余为 FALSE。
- 执行:
- 从当前的 dist[]数组中选出最小值 dist[vu]。
- 将 set[vu] 置为TRUE。
- 检测所有 set[vi]==FALSE 的点。
- 比较 dist[vi] 和 dist[vu]+w 的大小,w 为 <vu,vi>的权值。
- 如果 dist[vu]+w<dist[vi]
- 更新 path[] 并将 vu 加入路径中
- 直到遍历完所有的顶点(n-1次)
结合图来理解就是:


void Dijkstra(MGraph G, int v)
{
int set[MAXSIZE];
int dist[MAXSIZE];
int path[MAXSIZE];
int min;
int curvex;
for(int i=0;i<G.vexnum;i++)
{
dist[i]=G.edges[v][i];
set[i]=FALSE;
if(G.edges[v][i]<INF) path[i]=v;
else path[i]=-1;
}
set[v]=TRUE;path[v]=-1;
for(int i=0;i<G.vexnum-1;i++)
{
min=INF;
for(int j=0;j<G.vexnum;j++)
{
if(set[j]==FALSE;&&dist[j]<min)
{
curvex=j;
min=dist[j];
}
set[curvex]=TRUE;
}
for(int j=0;j<G.vexnum;j++)
{
if(set[j]==FALSE&&(dist[curvex]+G.edges[curvex][j])<dist[j])
{
dist[j]=dist[u]+G.edges[curvex][j];
path[j]=curvex;
}
}
}
}
复杂度分析:从代码可以很容易看出来这里有两层的for循环,时间复杂度为O(n^2)。
适用性:不适用于带有负权值的图。
Floyd
floyd算法是求图中任意两个顶点间的最短距离。
过程:
- 初始化一个矩阵A,(A^{(-1)})[i][j]=G.edges[i][j]。
- 迭代n轮:(A^{(k)})=Min{(A^{(k-1)})[i][j], (A^{(k-1)})[i][k]+(A^{(k-1)})[k][j]}
(A^{(k)})矩阵存储了前K个节点之间的最短路径,基于最短路径的性质,第K轮迭代的时候会求出第K个节点到其他K-1个节点的最短路径。
图解:

void Floyd(MGraph G, int Path[][MAXSIZE])
{
int A[MAXSIZE][MAXSIZE];
for(int i=0;i<G.vexnum;i++)
for(int j=0;j<G.vexnum;j++)
{
A[i][j]=G.edges[i][j];
Path[i][j]=-1;
}
for(int k=0;k<G.vexnum;k++)
for(int i=0;i<G.vexnum;i++)
for(int j=0;j<G.vexnum;j++)
if(A[i][j]>A[i][k]+A[k][j])
{
A[i][j]=A[i][k]+A[k][j];
Path[i][j]=k;
}
}
复杂度分析:主循环为三个for,O(n^3)。
适用性分析:允许图带有负权边,但是不能有负权边构成的回路。
拓扑排序
概念
- DAG,有向无环图。
- AOV网,用<Vi,Vj>表示 Vi 先于 Vj 的关系构成的DAG。即每个点表示一种活动,活动有先后顺序。
- 拓扑排序,满足以下关系的DAG,即求AOV网中可能的活动顺序:
- 每个顶点只出现一次。
- 若顶点 A 在顶点 B 之前,则不存在 B 到 A 的路径。
算法
一种比较常用的拓扑排序算法:
- 从DAG图中选出一个没有前驱的顶点删除。
- 从图中删除所有以该点为起点的边。
- 重复1,2。直到图为空。若不为空则必有环。

最终得到的拓扑排序结果为:1,2,4,3,5。
关键路径
概念
在带权有向图中,若权值表示活动开销则为AOE网。
AOE网的性质:
- 只有顶点的的事件发生后,后继的顶点的事件才能发生。
- 只有顶点的所有前驱事件发生完后,才能进行该顶点的事件。
源点:AOE 中仅有一个入度为0的顶点。
汇点:AOE 中仅有一个出度为0的顶点。
关键路径:从源点到汇点的所有路径中路径长度最大的。
关键路径长度:完成整个工程的最短时间。
关键活动:关键路径上的活动。
算法
先定义几个量:
ve(k),事件 vk 最早发生时间。决定了所有从 vj 开始的活动能开工的最早时间。- ve(源点)=0。
- ve(k)=Max{ve(j)+Weight(vj,vk)}。
- 注意从前往后算。
vl(k),事件 vk 最迟发生的时间。保证所指向的事件 vi 能在 ve(i)之前完成。- vl(汇点)=ve(汇点)。
- vl(k)=Min{vl(k)-Weight(vj,vk)}。
- 注意从后往前算。
e(i),活动 ai 最早开始的时间。- 若边<vk,vj>表示活动 ai,则有 e(i)=ve(k)。
l(i),活动 ai 最迟开始时间。- l(i)=vl(i)-Weight(vk, vj)。
d(i),活动完成的时间余量。- d(i)=l(i)-e(i)。
- l(i)=e(i)则为关键活动。
求关键路径算法如下:
- 求 AOE 网中所有事件的 ve()
- 求 AOE 网中所有事件的 vl()
- 求 AOE 网中所有活动的 e()
- 求 AOE 网中所有活动的 l()
- 求 AOE 网中所有活动的 d()
- 所有 d()=0的活动构成关键路径
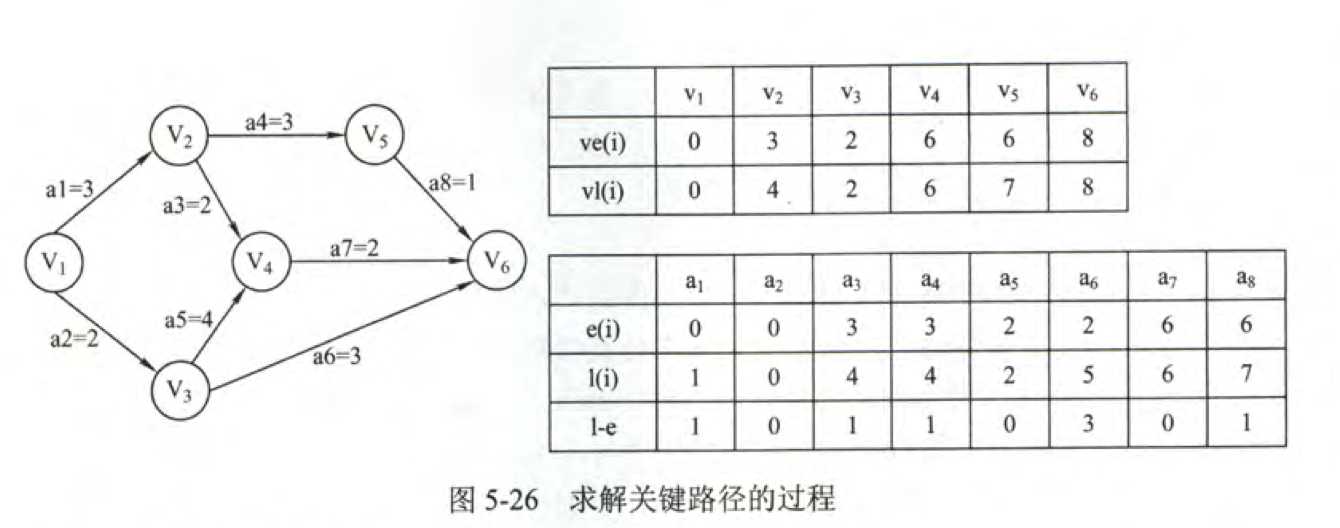
可以求得关键路径为(v1,v3,v4,v6)