NIOS II spi详解
1、说明
本文是依据笔者阅读《Embedded Peripherals (ver 9.0, Mar 2009, 4 MB).pdf》参考文档所作的个人理解,可以看做是笔记吧。
本文只讲NIOS II嵌入式外设SPI的原理与使用,关于IP-CORE的使用,请读者参考 《SPI Slave JTAG to Avalon Master.pdf》。
在下一篇文章中将用实例说明如何用SPI驱动ADS1256。
2、功能描述
Spi通讯包括两条数据线(进、出)、一条同步时钟线和一条控制线。
(1)Master Out Slave In (mosi)—主设备输入数据到从设备的数据线。
(2)Master In Slave Out (miso)—从设备输出数据到主设备的数据线。
(3)Serial Clock (sclk)—主设备驱动从设备的同步时钟。
(4)Slave Select (ss_n)—主设备驱动,用于选择从设备。置低时有效。最多可以设置32个从设备。
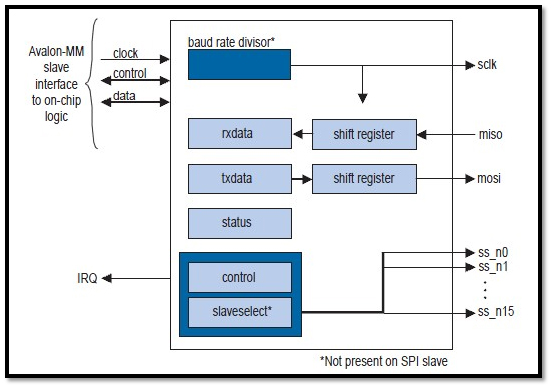
Sclk与Avalon—MM是同步的。当配置为主设备,spi-core将Avalon—MM的时钟分频得到sclk。若配置为从设备,接收逻辑是与sclk的输入同步的。
3、发送逻辑
发送逻辑包含发送保持寄存器(txdata)和发送移位寄存器,各有n位宽度,可配置1~32位。当某主外设写txdata,值会自动被复制到移位寄存器,并在下个操作开始时传输。
Txdata和移位寄存器提供两个存储空间。当有数据在移位寄存器传输时,可以往txdata中写入数据,并且在移位寄存器处理完当前数据时会自动加载txdata中数据,并发送。
在主设备模式传输移位寄存器直接驱动mosi,在从设备模式,传输移位寄存器直接驱动miso。
数据传输时,LSB或者MSB在前,由配置时用户指定。指定之后,不可软件更改。
4、接收逻辑
接收逻辑包含接收保持寄存器(rxdata)和接收移位寄存器,各有n位宽度,可配置1~16位。在接收移位寄存器捕获满n位数据后,主外设可以从rxdata中读取接收到的数据。
同发送逻辑类似,接收逻辑同样具有提供两个存储空间的功能。Rxdata可以保持前一个接收到的数据,同时接收移位寄存器亦在接收数据。当一个传输完毕时,接收逻辑自动将接收移位寄存器的数据更新至rxdata。
在主设备模数时,接收移位寄存器直接受miso驱动。在从设备模式 ,受mosi驱动。同样,数据传输时,LSB或者MSB在前,由配置时用户指定。指定之后,不可软件更改。
5、在SOPC中安装SPI-CORE
5.1 主从设置
用户可以选择主设备模式或者从设备模式。当选择主设备模式时,下面的选择是有效的:Number of select (SS_n) signals、SPI clock rate、 和 Specify delay.
(1)Number of Select (SS_n) Signals
设置从设备的个数。取值范围是1~32。该选择会在生成NIOS II时产生n个SS_n引脚,用于片选。
(2)SPI Clock (sclk) Rate
该时钟是有Avalon-MM分频产生,其数学关系是:
<Avalon-MM system clock frequency> / [2, 4, 6, 8, ...]
在SOPC设置时,可以输入所需要的时钟,软件会自动选择一个低于或者等于所输入时钟的最近符合值。
时钟的设置注意结合从设备的要求。
(3)Specify Delay
该延时是指片选信号有效(置低)之后,需要多长的时间才能对从设备发起操作。

5.2 数据寄存器设置
该设置影响数据寄存器的大小和行为特性。
(1)Width—设置txdata、rxdata、发送移位寄存器、接收移位寄存器的大小,可设置为1~32位。
(2)Shift direction—指定数据传输时LSB或者MSB在前。用户需了解从设备所需的模式。
5.3 时序设定
该设定涉及ss_n, sclk, mosi 和 miso 信号的设置。共有两处设定,可设定4种模式。
(1)Clock polarity—设置为0时,sclk空闲时为低;设置为1时,sclk空闲时为高。
(2)Clock phase—设置为0时,数据在sclk的上升沿锁存;设置为1时,数据在sclk的下降沿锁存。
具体见如下时序图:
1. Clock Polarity = 0, Clock Phase = 0

2. Clock Polarity = 0, Clock Phase = 1

3. Clock Polarity = 1, Clock Phase = 0

4. Clock Polarity = 1, Clock Phase = 1

6、NIOS II软件驱动模块
有两种方式:
1. 使用有Altera提供的alt_avalon_spi_command()函数,使用非常简单。具体可见笔者下一篇驱动实例。
2. 读者自己编写。
这里先将读者自己DIY的驱动编写方法。
6.1 驱动方式一
必须包含:
#include "altera_avalon_spi.h"
#include "altera_avalon_pio_regs.h"
这两个头文件。
文件中包含有寄存器地址与API函数。
IOWR_ALTERA_AVALON_SPI_SLAVE_SEL(); //从设备选择
IOWR_ALTERA_AVALON_SPI_CONTROL(base, data); //控制寄存器
IORD_ALTERA_AVALON_SPI_RXDATA(base); //读接收寄存器
IOWR_ALTERA_AVALON_SPI_TXDATA(base, data); //写发送寄存器
IORD_ALTERA_AVALON_SPI_STATUS(base); //读状态寄存器
为了准确实现方式,首先列出SPI寄存器映射图

(1)若rxdata和txdata少于16位,则[31:16]位无效;
(2)写status会清除ROE、TOE和E位;
(3)ss0只在作为主设备时有效;用来启动发送或者接受数据。例如:
na_spi_0-> np_spicontrol |= np_spicontrol_sso_mask;
for (i = 0; i < 3; ++i)
{
// Transmit a byte:
while (!(na_spi_0->np_spistatus & np_spistatus_trdy_mask));
na_spi_0->np_spitxdata = data[i];
// Read and throw away the received data:
while (!(na_spi_0->np_spistatus & np_spistatus_rrdy_mask));
na_spi_0->np_spirxdata;
}
// Wait until the last byte is transmitted:
while (!(na_spi_0->np_spistatus & np_spistatus_tmt_mask));
// Release SS_n:
na_spi_0-> np_spicontrol &=~np_spicontrol_sso_mask;
(4)rxdata:
(a)当接收寄存器接收到所设置的n位且将数据移入rxdata后,status中的RRDY设为1;软件可设查询此位来判断是否有新数据接收。如:
while(IORD_ALTERA_AVALON_SPI_STATUS(base) & ALTERA_AVALON_SPI_STATUS_RRDY_MSK == 1);
(b)读rxdata会自动清除RRDY位;
(c)新数据总是不断读入rxdata,若RRDY=1; rxdata的数据未读出时,有新的数据传入rxdata,则ROE=1;此时,rxdata存储的数据未定义。
(5)txdata:
(a)当TRDY=1时,表示发送寄存器准备好接受下一个发送数据。如:
while(IORD_ALTERA_AVALON_SPI_STATUS(base) & ALTERA_AVALON_SPI_STATUS_TRDY_MSK == 1);
(b)写入rxdata使TRDY=0;
(c)当txdata中的数据传入发送寄存器时,TRDY=1;
(d)若TRDY=0时写入数据至txdata会导致TOE=1;此时新数据被忽略。
6.2驱动方式二
该方式使用官方的函数:(下篇文章使用的是该方式。)
int alt_avalon_spi_command(alt_u32 base, alt_u32 slave,
alt_u32 write_length,
const alt_u8* wdata,
alt_u32 read_length,
alt_u8* read_data,
alt_u32 flags)
该函数不支持8位或者8位以上的传输。但是,可以调用多次实现高于8位的传输。该函数源码位于“<安装路径>/altera/81/ip/altera/sopc_builder_ip/altera_avalon_spi/HAL/src”。
alt_u32 base, alt_u32 slave, //选择从设备
alt_u32 write_length, //设置写入长度。8位为一个长度。
const alt_u8* wdata, //将要写入数据的数组地址。该函数自动将数组中的数据依次发出直到发出所设定的write_length长度。
alt_u32 read_length, //设置读出长度。8位为一个长度
alt_u8* read_data, //将读出的数据存储到数组中,直到存满所设定的read_length长度
alt_u32 flags, //如果flag=ALT_AVALON_SPI_COMMAND_MERGE,则访问完从设备之后不会释放从设备,一般用于需多次访问的情况。如果flag=0,则每次访问完从设备都会释放从设备,即当读取read_length个字节数,或者写完write_length个字节数,会释放从设备。
7、总结
笔者测试使用环境均为8.1版本。
使用器件为CYCLONE II EP2C8Q208C8N