一.为什么 连孔加除毛刺孔
原因是 PCB板材中含有玻璃纤维, 毛刺产生位置在于2个孔相交位置,由于此处钻刀受力不均导致纤维切削不断形成毛刺 ,为了解决这个问题:在钻完2个连孔后,在相交处再钻一个孔,并钻进去一点(常规进去1-2mil),这样就可以将纤维毛刺去除

PCB同行业毛刺问题处理办法 钻孔孔内毛刺问题分析改善报告
二.连孔加除毛刺孔实现原理
求解思路:
1.已知小圆半径:1.5mm,大圆半径 2mm,2个点距离3mm
利用海伦公式(三边求高)求出除尘孔径半径:0.8887mm
2.除尘孔半径 0.8888mm 转为钻刀向上取整为1.8mm
3. 求出小圆到大圆方位角,即为0度
求出小圆到毛刺孔距离,即为1.2083mm
4. 以小圆中心,通过方位角0与增量距1.2083mm求出毛刺孔坐标

三.C#简易代码实现:
1.加除毛刺孔代码(因为有现成的2D库直接用上来,其实还有一种更简便的计算公式;这里不介绍了)


#region 加除毛刺孔 mcdrl double a_side, b_side, c_side, height_side, holesize; a_side = calc2.p2p_di(hole1.p, hole2.p); b_side = hole1.width * 0.001 * 0.5; c_side = hole2.width * 0.001 * 0.5; height_side = calc1.side3_hight(a_side, b_side, c_side, 1) ; holesize = (int)(Math.Ceiling((height_side * 2 * 1000 ) / 50)) * 50; double direction_ang = calc2.p_ang(hole1.p, hole2.p); double direction_val = Math.Sqrt((b_side * b_side) - (height_side * height_side)); gPoint mcHole = calc2.p_val_ang(hole1.p, direction_val, direction_ang); addCOM.pad(mcHole, holesize); #endregion
2.计算函数
/// <summary> /// 3边求高 /// </summary> /// <param name="a_side"></param> /// <param name="b_side"></param> /// <param name="c_side"></param> /// <param name="abc"></param> /// <returns></returns> public double side3_hight(double a_side, double b_side, double c_side, int abc = 1) { double p, s; p = (a_side + b_side + c_side) / 2; s = Math.Sqrt(p * (p - a_side) * (p - b_side) * (p - c_side)); if (abc == 1) return (s / a_side ) *2; else if (abc == 2) return (s / b_side) * 2; else return (s / c_side) * 2; } /// <summary> /// 求方位角 /// </summary> /// <param name="ps"></param> /// <param name="pe"></param> /// <returns></returns> public double p_ang(gPoint ps, gPoint pe) { double a_ang = Math.Atan((pe.y - ps.y) / (pe.x - ps.x)) / Math.PI * 180; //象限角 转方位角 计算所属象限 并求得方位角 if (pe.x >= ps.x && pe.y >= ps.y) //↗ 第一象限 { return a_ang; } else if (!(pe.x >= ps.x) && pe.y >= ps.y) // ↖ 第二象限 { return a_ang + 180; } else if (!(pe.x >= ps.x) && !(pe.y >= ps.y)) //↙ 第三象限 { return a_ang + 180; } else if (pe.x >= ps.x && !(pe.y >= ps.y)) // ↘ 第四象限 { return a_ang + 360; } else { return a_ang; } }//求方位角 /// <summary> /// 返回两点之间欧氏距离 /// </summary> /// <param name="p1"></param> /// <param name="p2"></param> /// <returns></returns> public double p2p_di(gPoint p1, gPoint p2) { return Math.Sqrt((p1.x - p2.x) * (p1.x - p2.x) + (p1.y - p2.y) * (p1.y - p2.y)); } /// <summary> /// 求增量坐标 /// </summary> /// <param name="ps">起点</param> /// <param name="val">增量值</param> /// <param name="ang_direction">角度</param> /// <returns></returns> public gPoint p_val_ang(gPoint ps, double val, double ang_direction) { gPoint pe; pe.x = ps.x + val * Math.Cos(ang_direction * Math.PI / 180); pe.y = ps.y + val * Math.Sin(ang_direction * Math.PI / 180); return pe; }
3.Point,PAD数据结构
/// <summary> /// PAD 数据类型 /// </summary> public struct gP { public gP(double x_val, double y_val, double width_) { this.p = new gPoint(x_val, y_val); this.negative = false; this.angle = 0; this.mirror = false; this.symbols = "r"; this.attribut = string.Empty; this.width = width_; } public gPoint p; public bool negative;//polarity-- positive negative public double angle; public bool mirror; public string symbols; public string attribut; public double width; public static gP operator +(gP p1, gP p2) { p1.p += p2.p; return p1; } public static gP operator -(gP p1, gP p2) { p1.p -= p2.p; return p1; } } /// <summary> /// 点 数据类型 (XY) /// </summary> public struct gPoint { public gPoint(gPoint p_) { this.x = p_.x; this.y = p_.y; } public gPoint(double x_val, double y_val) { this.x = x_val; this.y = y_val; } public double x; public double y; public static gPoint operator +(gPoint p1, gPoint p2) { p1.x += p2.x; p1.y += p2.y; return p1; } public static gPoint operator -(gPoint p1, gPoint p2) { p1.x -= p2.x; p1.y -= p2.y; return p1; } }
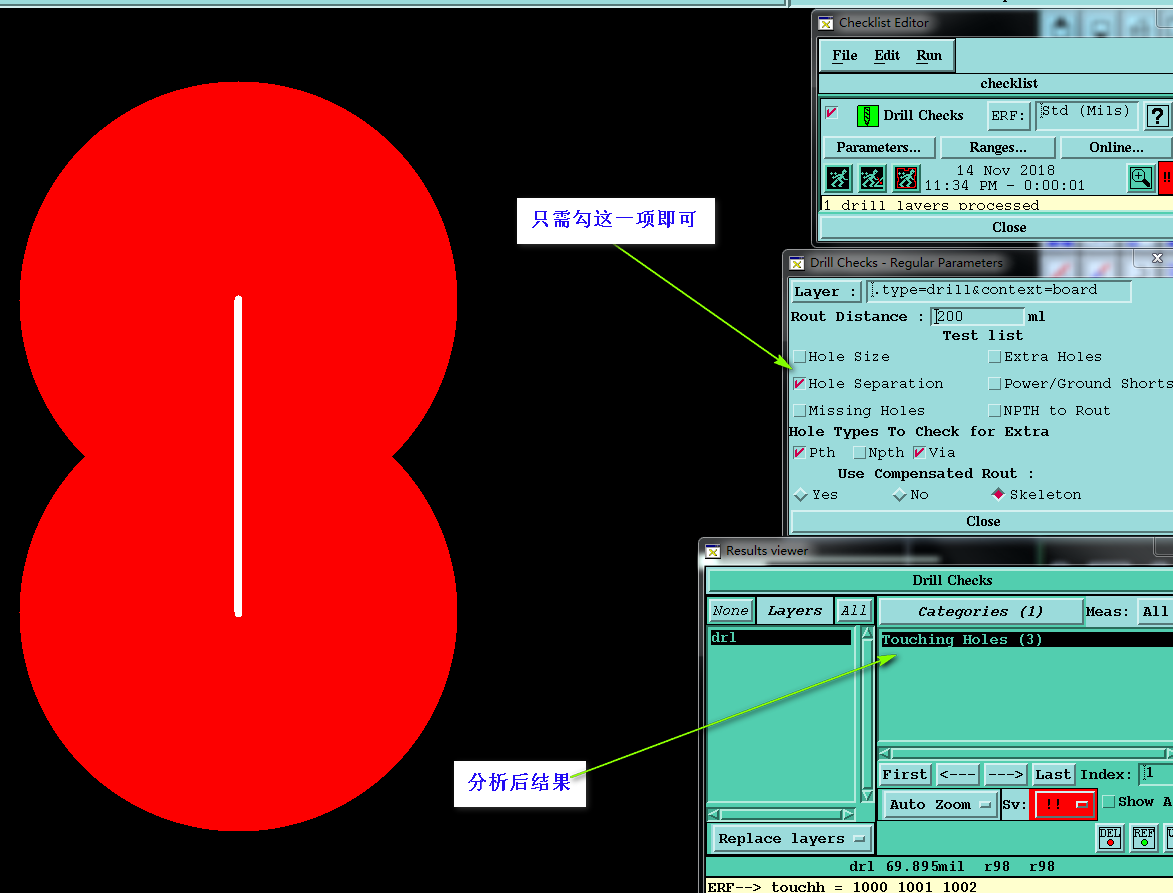
四.在Genesis或Incam中如何判断是否为连孔
判断2个孔是否为连孔,可以自己写算法实现啦,当然更多人还是会选择奥宝提供DrillChecklist分析出来的的结果来判断是否为连孔.因为你自己写的算法效率没有奥宝的效率高呀

五.实现效果