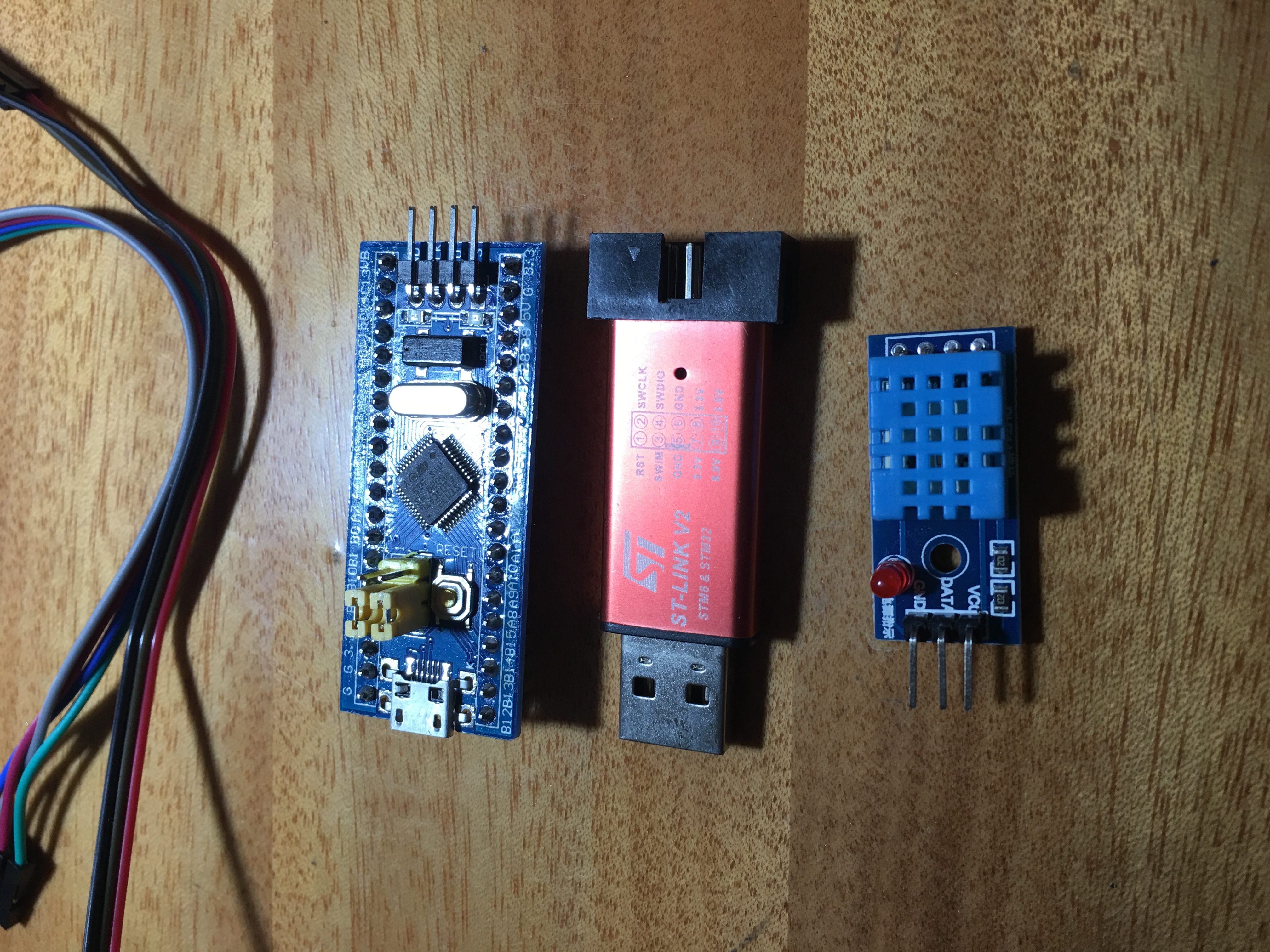
准备物件
- STM32F103C8T6核心板
- ST-LINK V2
- DHT11
- 杜邦线若干
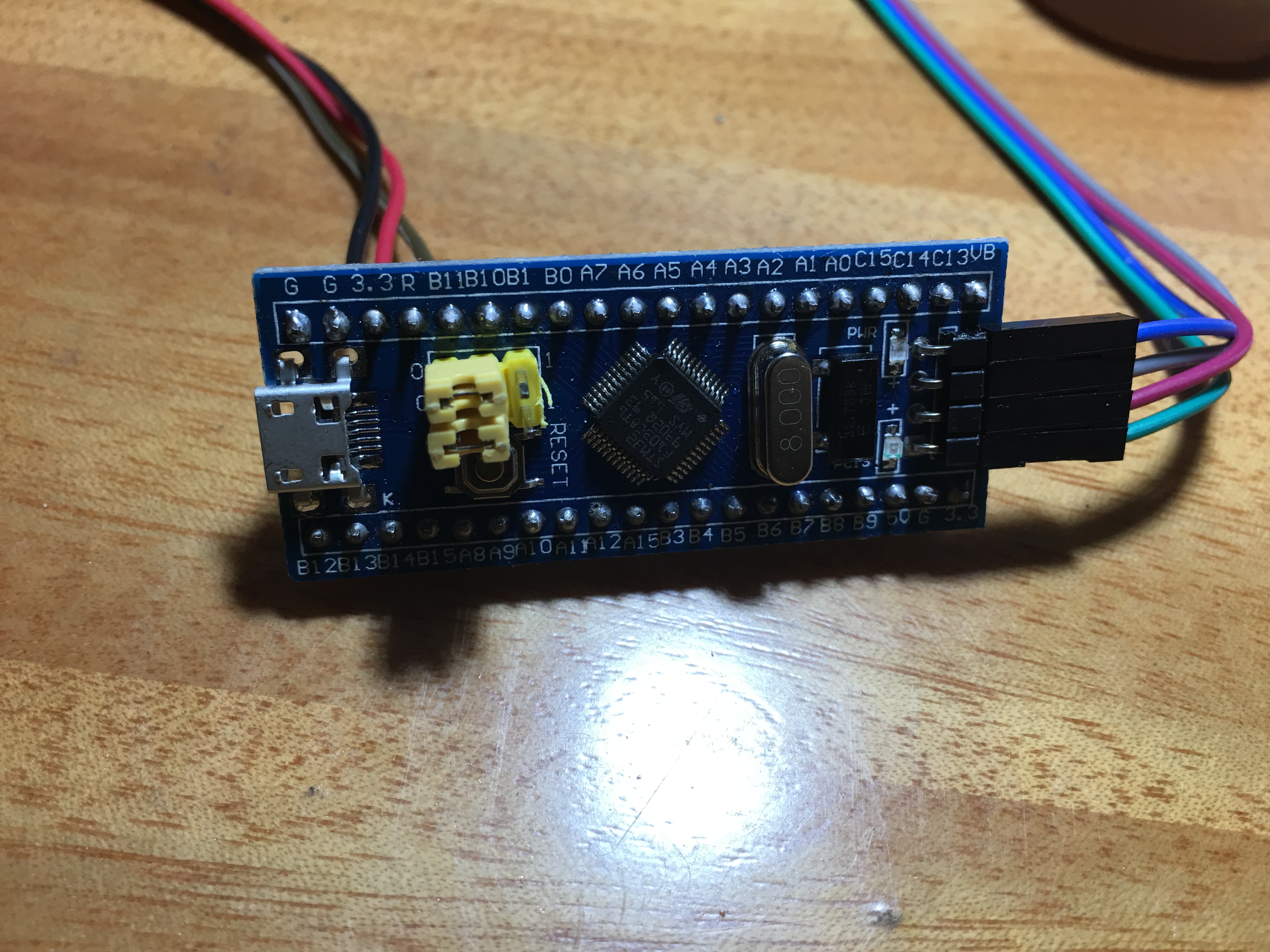
连接线
STM32F103C8T6芯片管脚图
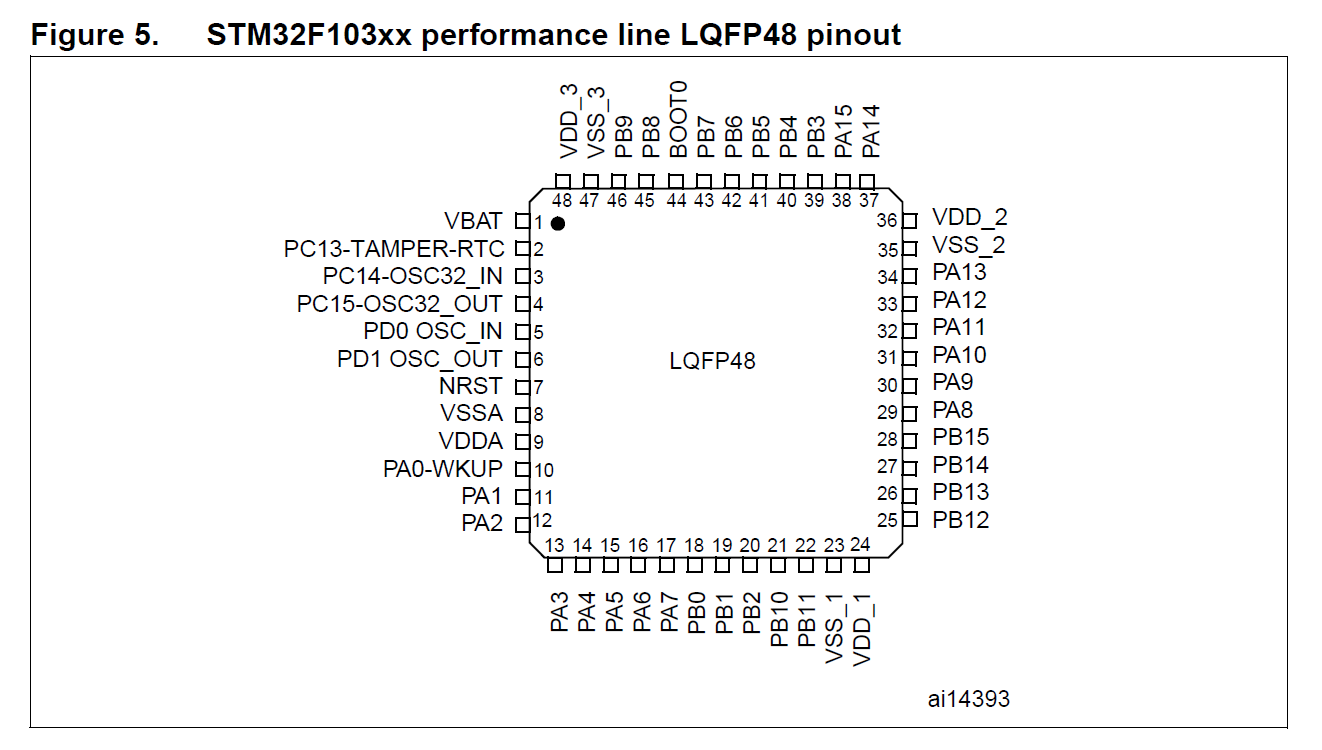
管脚说明

连接仿真器
| STM32 | ST-LINKV2 |
|---|---|
| VCC | VCC |
| GND | GND |
| SWCLK | SWCLK |
| SWDIO | SWDIO |
创建工程
参考STM32F103X 开发环境搭建
可将其模板复制一份
添加延时功能
在DRIVER/inc中添加timer.h
#ifndef __TIMER_H__
#define __TIMER_H__
#include "stm32f10x.h"
void systick_init(void);
void timing_delay_decrement(void);
void delay_us(__IO uint32_t n);
#endif
对应的在DRIVER/src中添加timer.c
#include "timer.h"
__IO uint32_t gTimingDelay;
/* SystemCoreClock / 1000 --> 1ms */
/* SystemCoreClock / 10000 --> 100us */
/* SystemCoreClock / 100000 --> 10us */
/* SystemCoreClock / 1000000 --> 1us */
void systick_init(void)
{
while (SysTick_Config(SystemCoreClock / 1000000) == 1);
}
void timing_delay_decrement(void)
{
if (gTimingDelay != 0x0)
{
gTimingDelay--;
}
}
void SysTick_Handler(void)
{
timing_delay_decrement();
}
void delay_us(__IO uint32_t n)
{
gTimingDelay = n;
while(gTimingDelay != 0);
}
点亮LED
可以看到核心板上有两个LED灯,PWR(电源)和PC13
修改USER/main.c
#include "stm32f10x.h"
#include "timer.h"
#define Led_On GPIO_SetBits(GPIOC, GPIO_Pin_13)
#define Led_Off GPIO_ResetBits(GPIOC, GPIO_Pin_13)
void LED_Init()
{
GPIO_InitTypeDef s;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
s.GPIO_Pin = GPIO_Pin_13;
s.GPIO_Mode = GPIO_Mode_Out_PP;
s.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &s);
}
int main()
{
SystemInit();
systick_init();
LED_Init();
while (1)
{
Led_On;
delay_us(500000);
Led_Off;
delay_us(500000);
}
}
<1> 由于timer.c已经实现SysTick_handler中断实现,需要编辑USER/stm32f10x_it.c,将SysTick_handler函数注释
<2> 右击工程名 -> Options -> C/C++ Compiler -> Preprocessor
在"Additional include directories:"中添加$PROJ_DIR$USERinc
<3> 右击工程名 -> Options -> Debugger -> Setup
在Driver中选择ST-LINK
<4> 右击工程名 -> Options -> ST-LINK -> Setup
在Reset选择Connect during reset
在Interface中选择SWD
<5> 点击编译,然后Download and Debug -> Go
便可以看到PC13 LED灯均匀的闪烁。
串口发送数据
用于显示DHT11读取的数据
连线方式
| USB-TTL | STM32 |
|---|---|
| VCC | VCC |
| GND | GND |
| RXD | PA9(TXD) |
| TXD | PA10(RXD) |
如果是树莓派,可以查看GPIO管脚说明,按照上述连接即可。
添加DRIVER/inc/usart.h
#ifndef __USART_H_
#define __USART_H_
#include "stm32f10x.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_usart.h"
#include <stdarg.h>
#define WAIT_TC while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET)
void usart_config(void);
void usart_gpio_init(void);
void usart_param_config(void);
void usart_send_string(char *data);
void usart_printf(const char *fmt, ...);
#endif
添加DRIVER/src/usart.c
#include "usart.h"
void usart_config(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
usart_gpio_init();
usart_param_config();
}
void usart_gpio_init(void)
{
GPIO_InitTypeDef g;
g.GPIO_Speed = GPIO_Speed_50MHz;
g.GPIO_Pin = GPIO_Pin_9;
g.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &g);
g.GPIO_Pin = GPIO_Pin_10;
g.GPIO_Mode = GPIO_Mode_IN_FLOATING; //开漏输入
GPIO_Init(GPIOA, &g);
}
void usart_param_config(void)
{
USART_InitTypeDef u;
u.USART_BaudRate = 9600;
u.USART_WordLength = USART_WordLength_8b; //数据位8位
u.USART_StopBits = USART_StopBits_1; //停止位1位
u.USART_Parity = USART_Parity_No; //无校验位
u.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
u.USART_Mode = USART_Mode_Tx;
USART_Init(USART1, &u);
USART_Cmd(USART1, ENABLE);
}
void usart_send_string(char *data)
{
char *p = data;
while (p < data + strlen(data))
{
WAIT_TC;
USART_SendData(USART1, *p++);
}
}
void usart_printf(const char *fmt, ...)
{
va_list ap;
char string[64];
va_start(ap, fmt);
vsprintf(string, fmt, ap);
va_end(ap);
usart_send_string(string);
}
main.c添加如下细节
#include "usart.h"
int main()
{
SystemInit();
systick_init();
usart_config();
LED_Init();
while (1)
{
Led_On;
usart_printf("test usart
");
delay_us(2000000);
Led_Off;
delay_us(2000000);
}
}
打开串口工具,linux下是minicom
minicom -b 9600 -D /dev/ttyUSB0
可以看到test usart字符,说明串口通信正常。
驱动DHT11
连线方式
| DHT11 | STM32 |
|---|---|
| VCC | VCC |
| GND | GND |
| DATA | PB11 |
添加DRIVER/inc/dht11.h
#ifndef __DHT11_H__
#define __DHT11_H__
#include "timer.h"
#include "stm32f10x_gpio.h"
#define DHT11_GPIO_TYPE GPIOB
#define DHT11_GPIO_PIN GPIO_Pin_11
#define DHT11_RCC RCC_APB2Periph_GPIOB
#define DHT11_OUT_H GPIO_SetBits(DHT11_GPIO_TYPE, DHT11_GPIO_PIN)
#define DHT11_OUT_L GPIO_ResetBits(DHT11_GPIO_TYPE, DHT11_GPIO_PIN)
#define DHT11_IN GPIO_ReadInputDataBit(DHT11_GPIO_TYPE, DHT11_GPIO_PIN)
void dht11_gpio_input(void);
void dht11_gpio_output(void);
u16 dht11_scan(void);
u16 dht11_read_bit(void);
u16 dht11_read_byte(void);
u16 dht11_read_data(u8 buffer[4]);
#endif
添加DRIVER/src/dht11.c
#include "dht11.h"
void dht11_gpio_input(void)
{
GPIO_InitTypeDef g;
RCC_APB2PeriphClockCmd(DHT11_RCC, ENABLE);
g.GPIO_Pin = DHT11_GPIO_PIN;
g.GPIO_Speed = GPIO_Speed_50MHz;
g.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(DHT11_GPIO_TYPE, &g);
}
void dht11_gpio_output(void)
{
GPIO_InitTypeDef g;
RCC_APB2PeriphClockCmd(DHT11_RCC, ENABLE);
g.GPIO_Pin = DHT11_GPIO_PIN;
g.GPIO_Speed = GPIO_Speed_50MHz;
g.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_Init(DHT11_GPIO_TYPE, &g);
}
void dht11_reset(void)
{
// 按照DHT11手册步骤
dht11_gpio_output();
DHT11_OUT_L;
delay_us(19000);
DHT11_OUT_H;
delay_us(30);
dht11_gpio_input();
}
u16 dht11_scan(void)
{
return DHT11_IN;
}
u16 dht11_read_bit(void)
{
while (DHT11_IN == RESET);
delay_us(40);
if (DHT11_IN == SET)
{
while (DHT11_IN == SET);
return 1;
}
else
{
return 0;
}
}
u16 dht11_read_byte(void)
{
u16 i;
u16 data = 0;
for (i = 0; i < 8; i++)
{
data <<= 1;
data |= dht11_read_bit();
}
return data;
}
u16 dht11_read_data(u8 buffer[5])
{
u16 i = 0;
dht11_reset();
if (dht11_scan() == RESET)
{
//检测到DHT11响应
while (dht11_scan() == RESET);
while (dht11_scan() == SET);
for (i = 0; i < 5; i++)
{
buffer[i] = dht11_read_byte();
}
while (dht11_scan() == RESET);
dht11_gpio_output();
DHT11_OUT_H;
u8 checksum = buffer[0] + buffer[1] + buffer[2] + buffer[3];
if (checksum != buffer[4])
{
// checksum error
return 1;
}
}
return 0;
}
修改USER/main.c
#include "dht11.h"
int main()
{
SystemInit();
systick_init();
usart_config();
LED_Init();
while (1)
{
Led_On;
u8 buffer[5];
double hum;
double temp;
if (dht11_read_data(buffer) == 0)
{
hum = buffer[0] + buffer[1] / 10.0;
temp = buffer[2] + buffer[3] / 10.0;
}
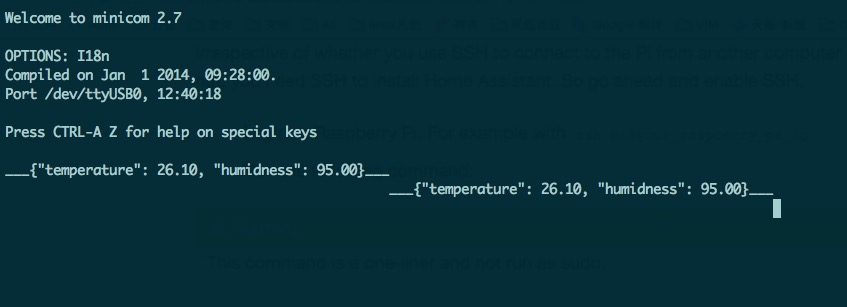
usart_printf("___{"temperature": %.2f, "humidness": %.2f}___
", temp, hum);
delay_us(2000000);
Led_Off;
delay_us(2000000);
}
}
编译、运行,发现串口可以收到温度信息。
minicom -b 9600 -D /dev/ttyUSB0