一、简介
为了避免在ARM开发中频繁的切换ubuntu和windows系统,所以就想到,直接能控制开发板就好了。
- 1.ubuntu版本:18.04
- 2.USB转串口芯片:PL2303
- 3.虚拟机:VMware 14
- 4.ARM开发板系统:linux
二、连接串口到虚拟机
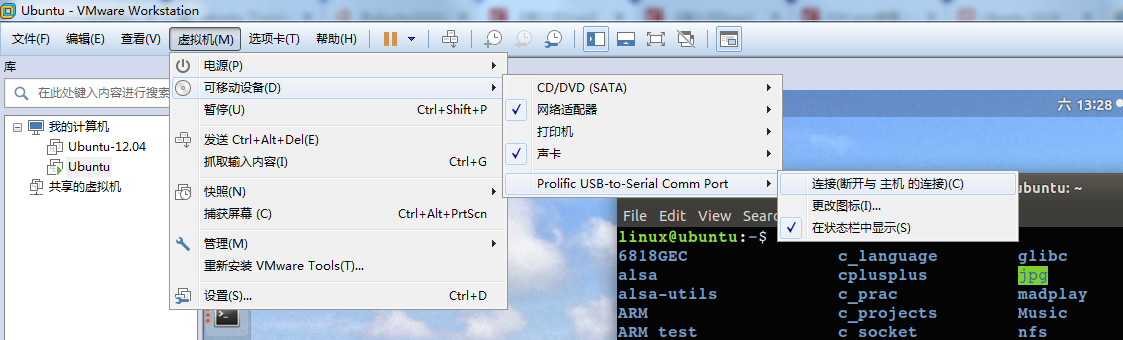
如图所示,将串口连接到虚拟机
三、ubuntu上安装minicom
linux@ubuntu:~$ sudo apt-get install minicom
四、配置Ubuntu上刚安装的minicom
- 1.查看串口终端设备文件
linux@ubuntu:~$ dmesg | grep ttyS*
[ 0.004000] console [tty0] enabled
[ 1.266747] 00:05: ttyS0 at I/O 0x3f8 (irq = 4, base_baud = 115200) is a 16550A
[ 5123.329617] usb 2-2.1: pl2303 converter now attached to ttyUSB0
我这里PL2303的驱动的设备文件是ttyUSB0
- 2.配置minicom
linux@ubuntu:~$ sudo minicom -s
进入minicom配置界面
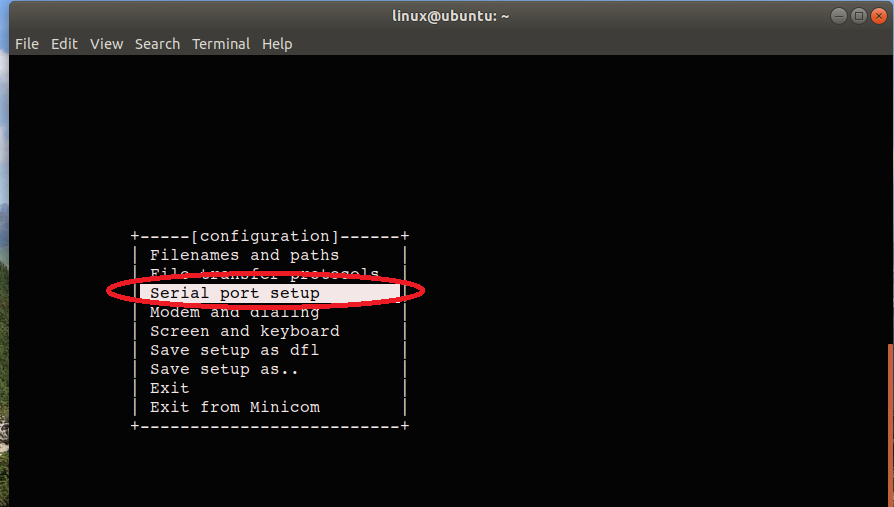
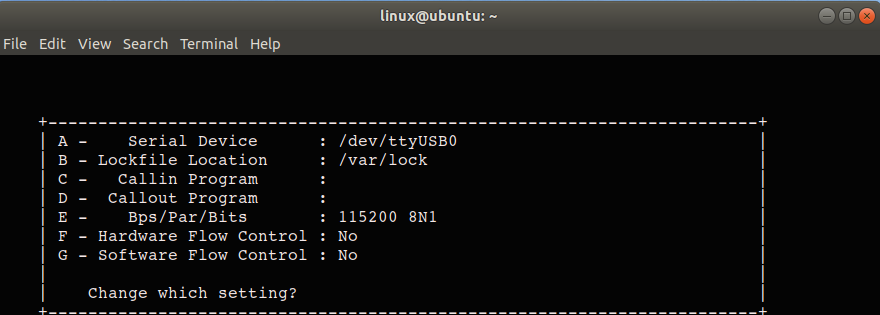
配置如下参数:Serial Device根据前面查看的设备文件设置
保存配置
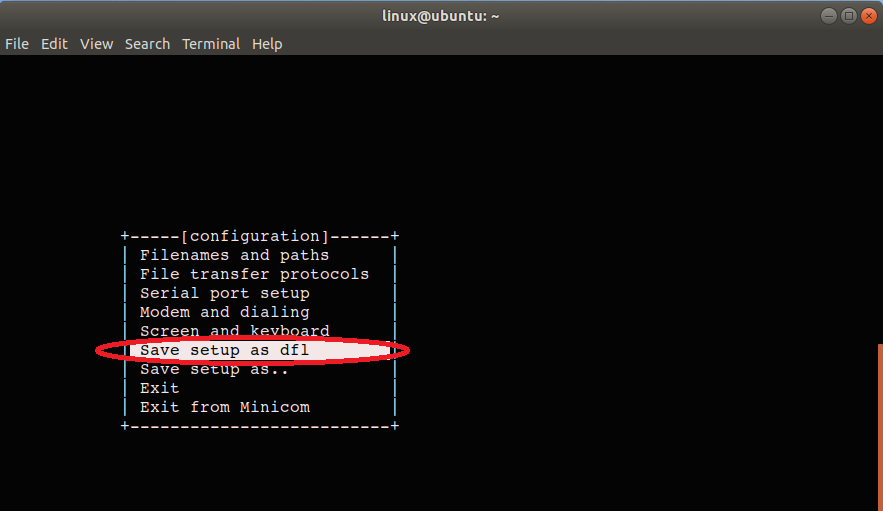
退出配置页面

五、使用
运行minicom,相当于一个串口终端、可对开发板进行控制了。
linux@ubuntu:~$ sudo minicom
如图
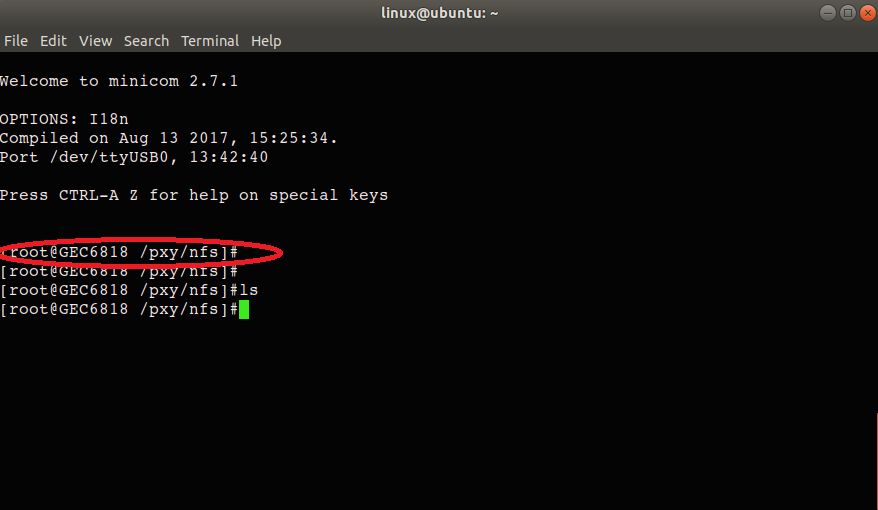
现在可以在Ubuntu上随心所欲的控制ARM开发板