最近新入职一家公司,是搞智能无人驾驶的,用的操作系统是Ubuntu和ros,之前没接触过ros系统,既然公司用那就必须的学习啊,话不多说先装它一个ros玩玩...
1. Ubuntu 安装 ROS Kinetic
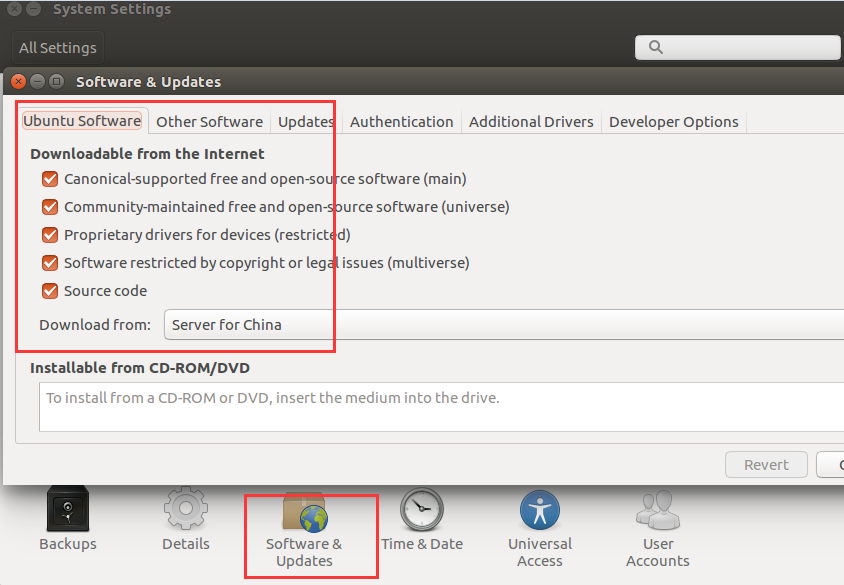
1.1Configure your Ubuntu repositories(配置您的Ubuntu存储库)
在系统设置中,找到软件与更新,将如下几个都勾选,允许其从互联网下载。
1.2 Setup your sources.list(设置你的计算机以接受packages.ros.org中的软件).
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
1.3 Set up your keys
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116 Executing: /tmp/tmp.NItfnqYQnV/gpg.1.sh --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116 gpg: requesting key B01FA116 from hkp server ha.pool.sks-keyservers.net gpg: key B01FA116: public key "ROS Builder <rosbuild@ros.org>" imported gpg: Total number processed: 1 gpg: imported: 1
1.4 Installation
$ sudo apt-get update
$ sudo apt-get install ros-kinetic-desktop-full
安装过程中如果出现如下的错误,删除就可以.
# 错误 E: Could not get lock /var/lib/dpkg/lock - open (11 Resource temporarily unavailable) E: Unable to lock the administration directory (/var/lib/dpkg/), is another process using it?
#执行如下命令解决 sudo rm /var/cache/apt/archives/lock sudo rm /var/lib/dpkg/lock
1.5 Initialize rosdep(初始化rosdep)
$ sudo rosdep init
$ rosdep update
1.6 Environment setup(配置环境)
$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc $ source ~/.bashrc
1.7 Dependencies for building packages(安装building package的依赖)
$ sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
1.8测试ROS安装是否成功
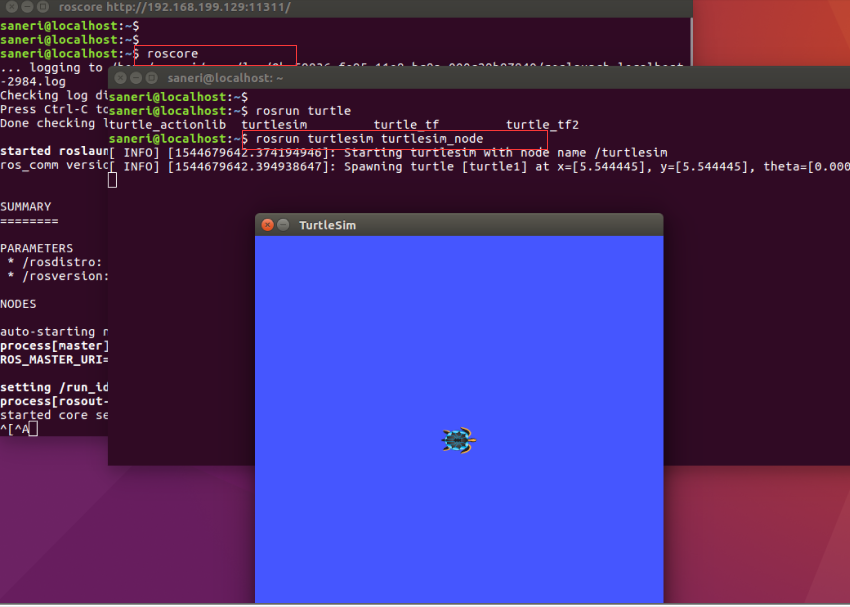
1> 打开Termial,输入以下命令,初始化ROS环境:
$ roscore
2> 打开新的Termial,输入以下命令,弹出一个小乌龟窗口如下图:
$ rosrun turtlesim turtlesim_node
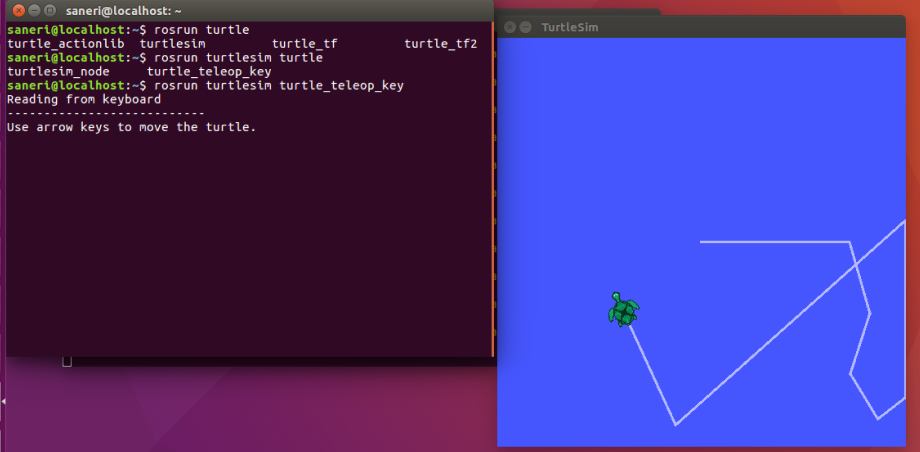
3> 打开新的Termial,输入以下命令,可以在Termial中通过方向键控制小乌龟的移动,如果不能控制,请选中turtle_teleop_key所在的终端窗口以确保你的按键输入能够被捕获。
$ rosrun turtlesim turtle_teleop_key
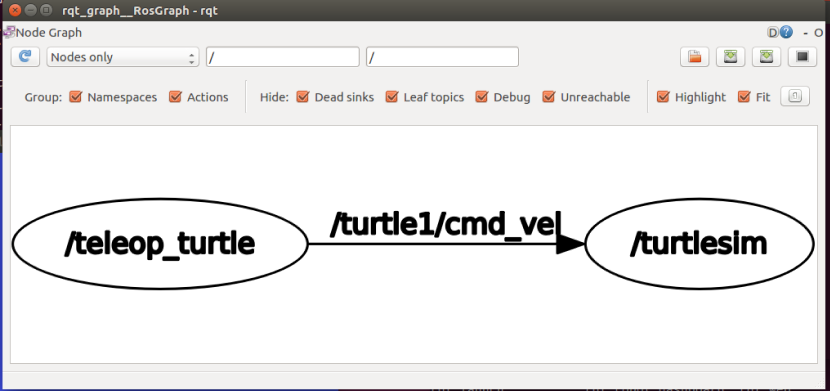
4.>打开新的Termial,输入以下命令,弹出新的窗口查看ROS节点信息:
$ rosrun rqt_graph rqt_graph
至此,ros Kinetic安装完成,下面就需要学习ros系统的使用了.
ROS环境变量管理
如果你在查找和使用ROS软件包方面遇到了问题,请确保你已经正确配置了脚本环境。一个检查的好方法是确保你已经设置了像ROS_ROOT和ROS_PACKAGE_PATH这样的环境变量,可以通过以下命令查看:
$ export |grep ros
如果你是通过ubuntu上的 apt 工具来安装ROS的,那么你将会在'/opt/ros/<distro>/'目录中看到setup.*sh文件,然后你可以执行下面的source命令:
# source /opt/ros/<distro>/setup.bash
请使用具体的ROS发行版名称代替<distro>,我的版本是kinetic版本的,则执行命令为:
$ source /opt/ros/kinetic/setup.bash
查看ROS版本的方法:
1、先在终端输入roscore
2、打开新终端,再输入,rosparam list
3、再输入rosparam get /rosdistro 就能得到版本
$ rosparam get /rosdistro 'kinetic '
参考文档: http://wiki.ros.org/kinetic/Installation/Ubuntu
https://blog.csdn.net/softimite_zifeng/article/details/78632211