相位法测角:
基本原理:
相位法测角利用多个天线所接收回波信号之间的相位差进行测角。设在θ方向有远区目标,则到达接收点的目标所反射的电波近似为平面波。由于两天线间距为d,故它们所收到的信号由于存在的波程差ΔR而产生一相位差φ.
式中,λ为雷达波长。如用相位计进行比相,测出其相位差φ,就可以确定目标方向θ。
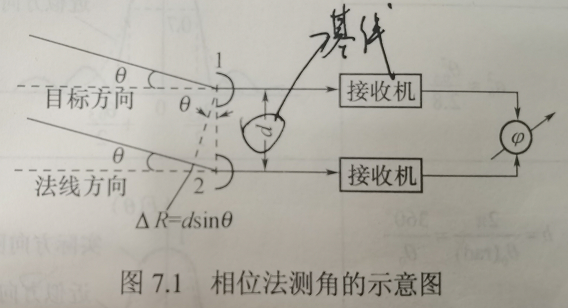
注:通常两天线的间距d较小,使得相位差φ的值不超过2pi。因此短基线可保证较大的无模糊测角范围,
2、测角误差与多值性问题
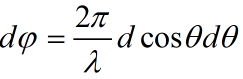
相位差φ值测量不准将产生测角误差,上式两边微分,则它们之间的关系为:
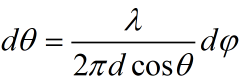
采用读数精度高(dφ小)的相位计,或减小λ/d值(或增大d/λ),均可提高测角精度。我们还注意到:当θ=0时,即目标处在天线法线方向时,测角误差dθ最小。当θ增大时,dθ也增大,为保证一定测角精度,θ的范围有一定的限制。
增大d/λ可提高测角精度,但在感兴趣的θ范围内,当d/λ增大到一定时,φ值可能超过2pi,这时φ=2pi*N+ψ,其中N为整数;ψ<2pi,而相位计实际读数为ψ。又因为N值未知,因而真实的φ值不能确定,会出现模糊问题。
比较有效的方法利用三天线测角设备,间距大的1、3天线用来得到高精度测量,而间距小的1、2天线用来解决多值性。
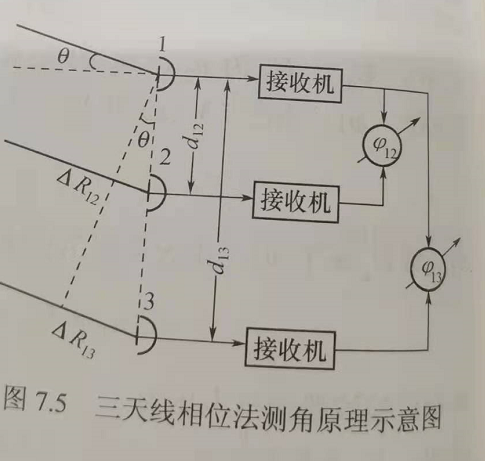
首先天线1、2收到的信号之间的相位差在测角范围内满足:

其中φ12由相位计测得。
同样天线1、3收到信号的相位差为:
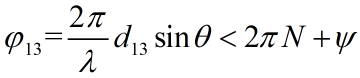
由相位计读出的φ13,但实际读数是小于2pi的ψ。为了得到N值,可利用如下关系。

通过求的φ12就可得到φ13关于N的结果。从而保证所要求的测角精度。