问题描述:机器人到达导航点之后不再移动,无法旋转到目标方向。
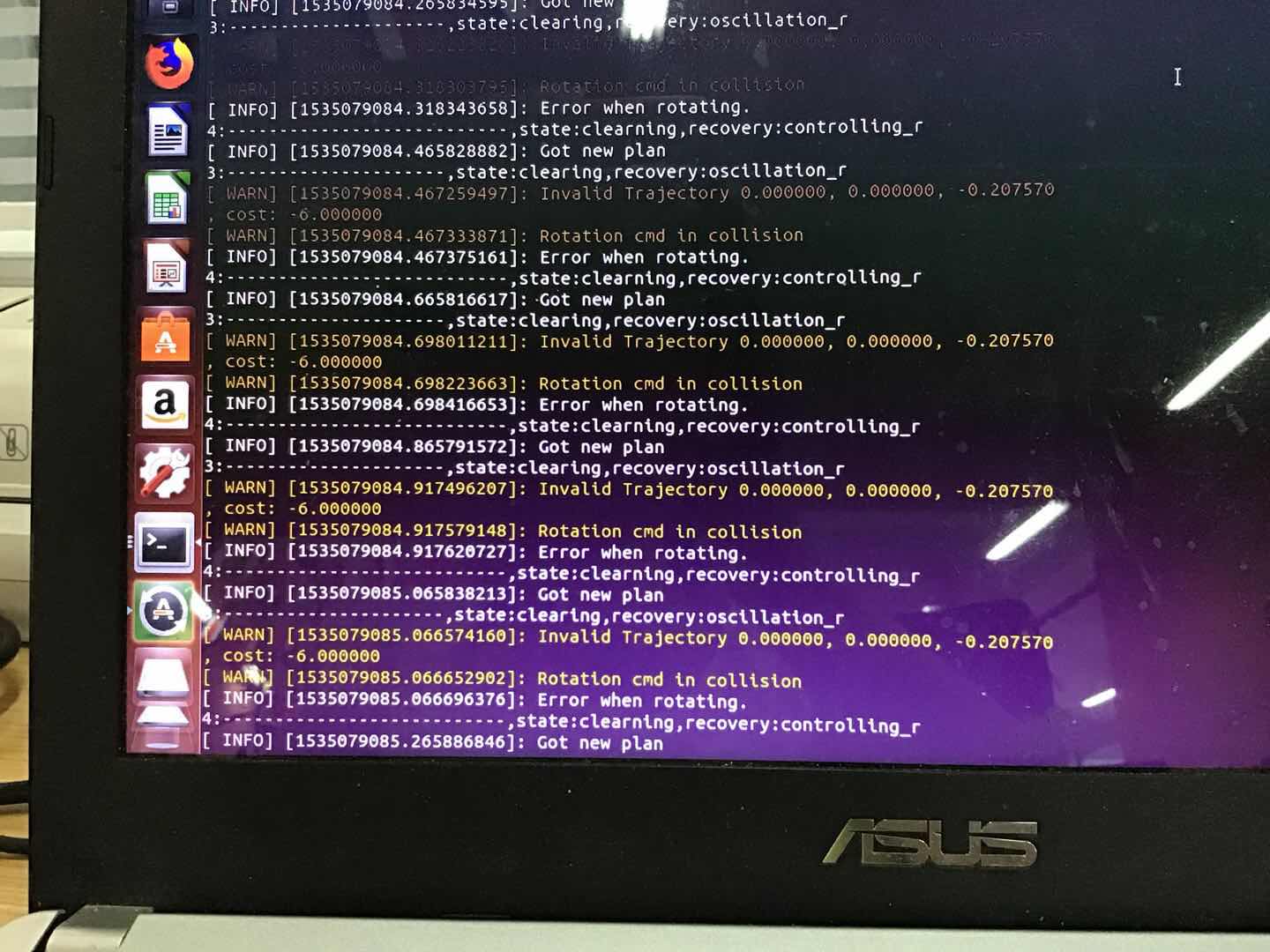
log: a) Error when rotation.
b) Rotation cmd in collision.
图片:
解决方案:
1> https://github.com/ros-planning/navigation/issues/327
2> https://github.com/corot/navigation/commit/af6ff87ac1d8e3406db79f5edf58824572b74029