1.前言
eMMC总线操作包含:
- boot mode
- device identification mode
- interrupt mode
- data transfer mode
本文主要描述boot mode。
2. boot operation mode
2.1 boot mode状态机
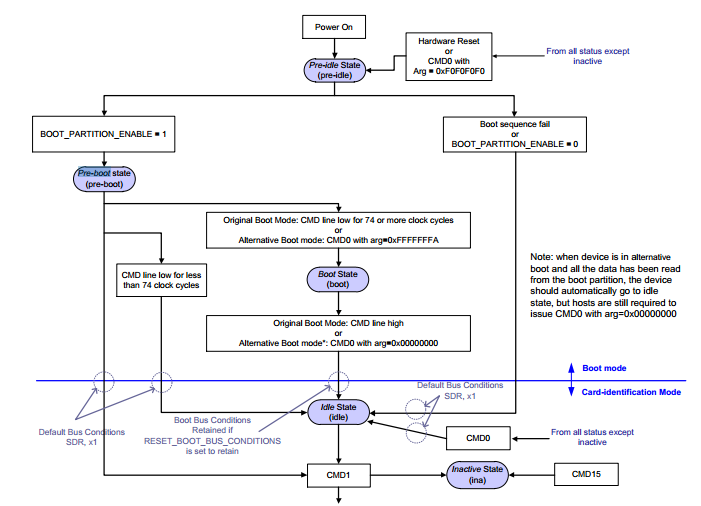
图 eMMC boot mode state
- pre-idle state
. 三种方式可以进入pre-idle状态:(1)power on后;(2)GO_PRE_IDLE_STATE命令(CMD0+0xf0f0f0f0参数);(3)hw reset by host
. GO_PRE_IDLE_STATE或hw reset assert后,device端output bus将呈现高阻态,device的初始地址被设置为0x0001,bus会有默认的驱动能力
. device可以检测到rst_n产生一段脉冲信号,通过上升沿来确定device是否发生了reset操作
. 有两个boot分区,每个分区大小最小为128KB,boot分区与user area是分离的,单独编址
. 可以使用CMD6来设置BOOT_PARTITION_ENABLE=1从boot area启动(否则从user area启动),进入到pre-boot state,如果BOOT_PARTITION_ENABLE=0或不支持boot mode(4.2以前的版本)则直接进入到idle state
- pre-boot state
. 上电或reset后且发送第一个命令CMD1之前,CMD LINE要保持至少74个周期的低电平,device识别到,进入boot state执行初始化,并准备boot data
若是CMD lines没有保持74个时钟周期的LOW,又若是host在初始话过程之前发送任意的正常eMMC命令的话,slave应该没有任何反应且会退出boot mode到Idle State状态即card identification mode
注:CMD0+0xfffffffa执行alternative boot初始化是针对4.4的规范,CMD LINE不是保持74个周期的低电平,而是通过发送CMD0,并带有参数0XFFFFFFFA
- boot state
主要进行boot数据的读取操作:
. host要读取的分区以及data size可以通过extended csd来设置
. 通过保持CMD line低电平或发送CMD0+0XFFFFFFFA来读取boot数据
. 在读取数据期间,cmd line必须保持低电平
. host必须采用push-pull模式,直到boot mode结束
. host可以采用single data rate(SDR)或dual data rate(DDR)
. HS200 & HS400在boot mode不支持
. host可以设置是否从device接收boot acknowledge
. 通过拉高CMD line则会终止boot mode进入idle state,从此离开boot mode 进入到card identification mode
2.2 boot mode时序

图 boot mode时序
进入boot state后:
. 若是boot acknowledge被激活,在CMD信号变LOW之后的50ms之内,slave必须发送acknowledge内容"010"到host。若是boot acknowledge没被激活,slave不会 发送;
.在CMD line变低的1S内,device 必须发出第一个数据给host;
.host必须保持CMD信号为LOW来读取所有的boot数据, host必须使用push-pull模式
.当boot数据读取操作完成,boot操作将会终止;
.通过拉高CMD line则会终止boot mode进入idle state,从此进入card identification mode
.当拉高CMD line后需要经过至少56个clock,才可以发送CMD1
注1:host选择从哪个partition读取boot数据是可以被提前设置的(EXT_CSD byte[179], bits[5:3]). Master可以读取的boot数据大小也是可以计算的(128KB x BYTE_SIZE_MULT (EXT_CSD byte[226]))
注2:host可以通过设置EXT_CSD byte[179],bit 6来选择是否从slave接受acknowledge,若是选择接受host可以通过acknowledge确认slave是在boot模式中运行。
注3:在数据传输阶段若是host把CMD拉高,slave必须在Nst个时钟周期内中终止数据或者acknowledge内容的传输。Nst值为一个数据周期和一个结束bit周期。若是在block传输过程中,master终止了boot模式,则slave必须在Nst个时钟周期内释放data lines。
3.参考文档
[1]http://www.jedec.org/sites/default/files/docs/JESD84-B51.pdf
[2]eMMC启动过程 http://blog.sina.com.cn/s/blog_6cb8cdbd0102vno5.html