1.前言
嵌入式实时操作系统需要对整个系统环境产生的事件作出响应。可以采用中断方式也可以采用轮询方式来进行处理。如果采用中断方式,则希望ISR(中断服务例程)的处理时间越短越好。
注:必须说明的是,只有以”FromISR”或”FROM_ISR”结束的API 函数或宏才可以在中断服务例程中。
2. 延迟中断处理
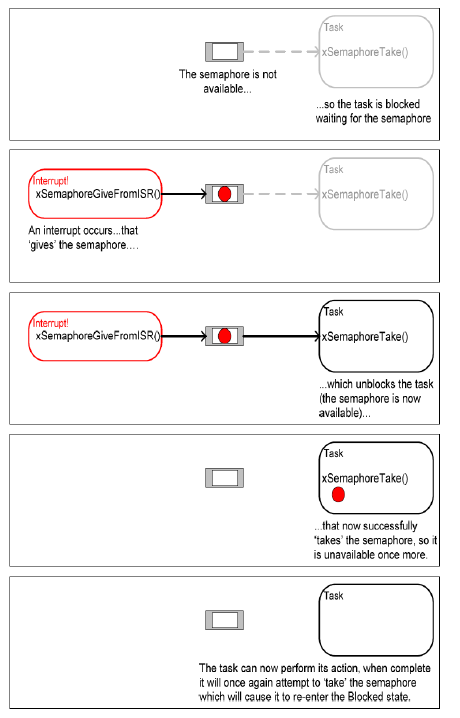
图 利用二值信号量实现中断与任务同步
- 延迟中断的实现
(1)通过在中断处理中增加二值信号量,中断发生时解除任务的阻塞状态,让任务得以执行,相当于让任务与中断同步;
(2)这样中断处理例程中就可以做少量的事情,大量的工作放到同步任务中完成;
(3)将工作量大的事情交给解除阻塞的同步任务来执行,从这个角度上看,中断处理被延迟了,所以称为延迟中断处理。
注:二值信号量可以理解成一个深度为1的队列。
- 延迟中断同步任务优先级
(1)如果中断处理特别紧急,可以将中断退出后的同步任务优先级设为最高,保证中断延迟处理任务随时可以中断其它任务;
(2)由于中断同步任务紧跟中断处理函数执行,相当于所有的处理都在ISR中完成一样
注:中断延迟是ISR give信号量,任务take信号量,且再也不用give,这种用法很类似于队列的用法,与其它的任务同步方法有所区别
3. 相关处理流程举例

- 处理流程介绍
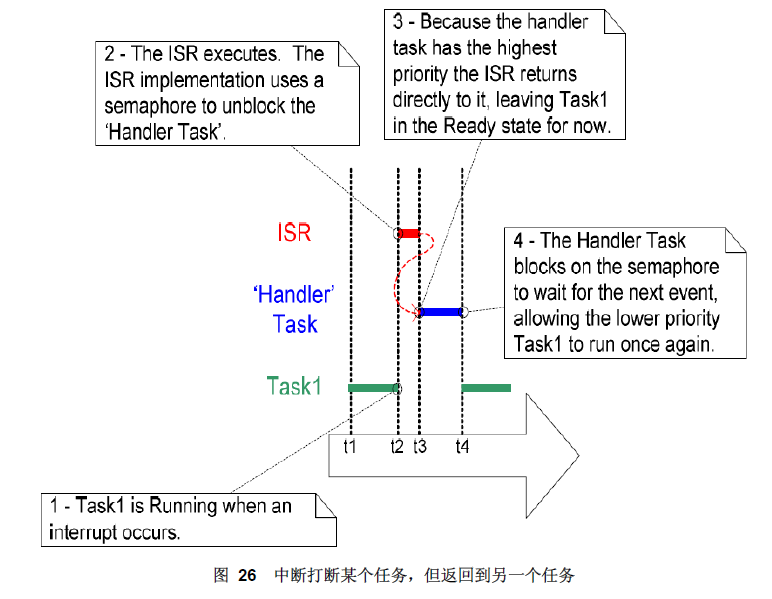
(1)handler任务具有比periodic任务高的优先级,handler任务中等待信号量,在periodic任务中触发中断;
(2)中断处理函数中执行give操作后,并通过一次显示的任务调度保证切换到handler任务处理;
(3)handler任务获取信号量后继续执行,之后将执行periodic任务
- 上例中二值信号量的流程
1. 中断产生。
2. 中断服务例程启动,给出信号量以使延迟处理任务解除阻塞。
3. 当中断服务例程退出时,延迟处理任务得到执行。延迟处理任务做的第一件事便是
获取信号量。
4. 延迟处理任务完成中断事件处理后,试图再次获取信号量——如果此时信号量无效,
任务将切入阻塞待等待事件发生。
4.相关的API处理
| API | 说明 | 参数及返回值 |
| vSemaphoreCreateBinary | 创建二值信号量 |
xSemaphore 创建的信号量 |
| xSemaphoreTake |
获取(Obtain)”或”接收(Receive)”信号量。只有当信 |
xSemaphore 获取得到的信号量 xTicksToWait 阻塞超时时间。如果把xTicksToWait 设置为portMAX_DELAY , 并且在 FreeRTOSConig.h 中设定INCLUDE_vTaskSuspend 为1,那么阻塞等待将没有超时限制。 |
| xSemaphoreGiveFromISR |
是xSemaphoreGive()的特殊形式,专门用于中断服务例程中 |
xSemaphore 给出的信号量 pxHigherPriorityTaskWoken 对某个信号量而言,可能有不止一个任务处于阻塞态在等待其有效。调用xSemaphoreGiveFromISR()会让信 |