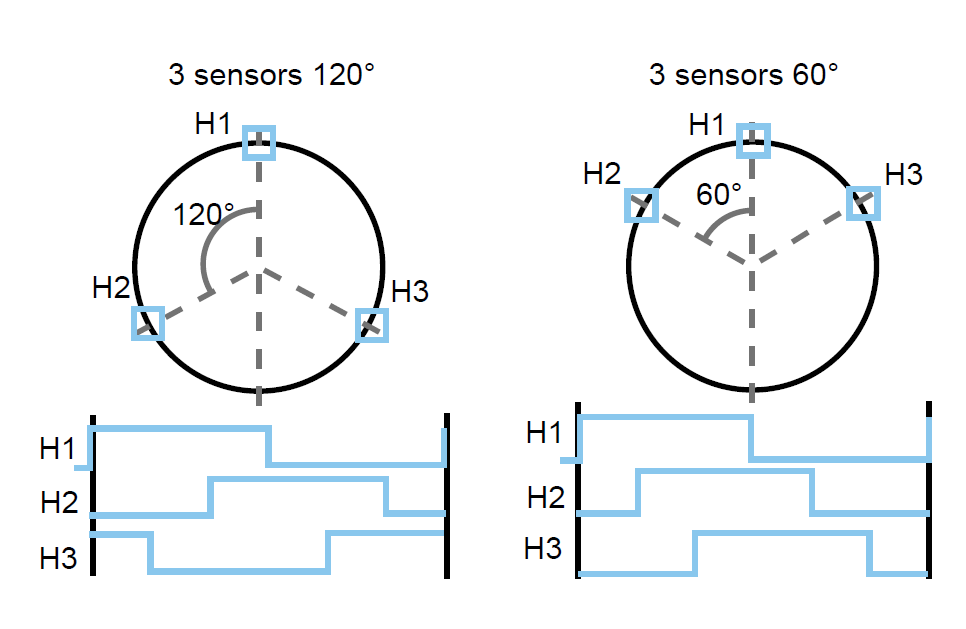
从电机出轴方向看去,电机轴逆时针转动,霍尔信号的序列为
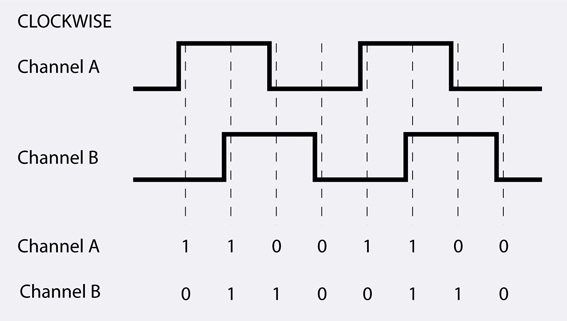
编码器信号的序列为
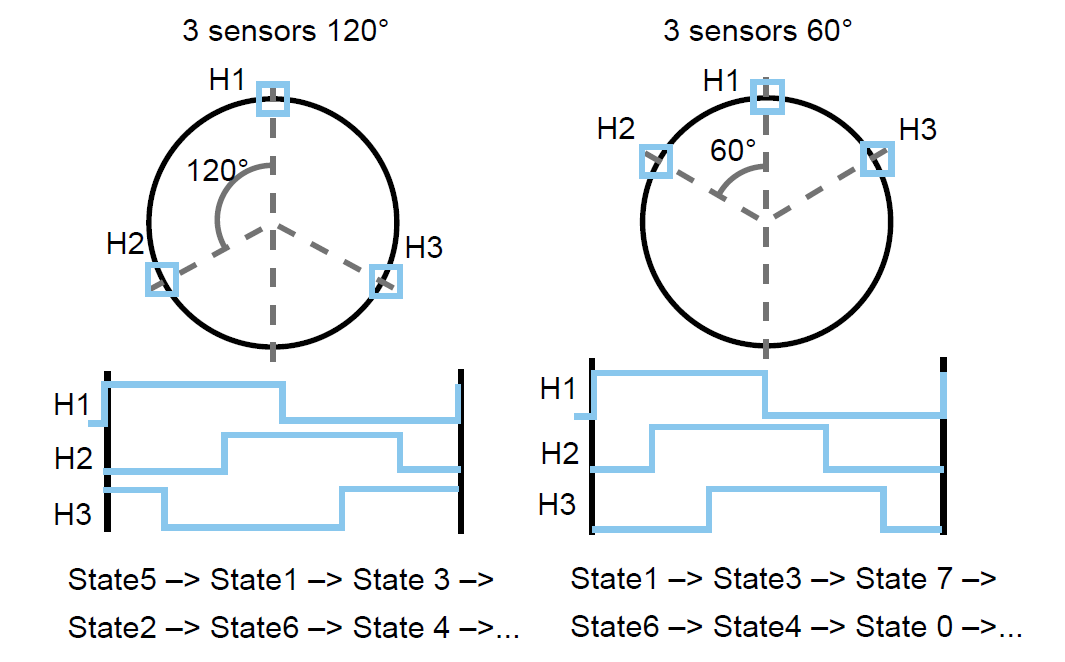
将霍尔信号按照H3 H2 H1的顺序组成三位二进制数,则霍尔信号翻译成状态为
以120°放置霍尔为例
如不给电机加电,使用示波器测量三个霍尔信号和电机三相反电动势,
按照上面所说的方向用手转动电机得到下图
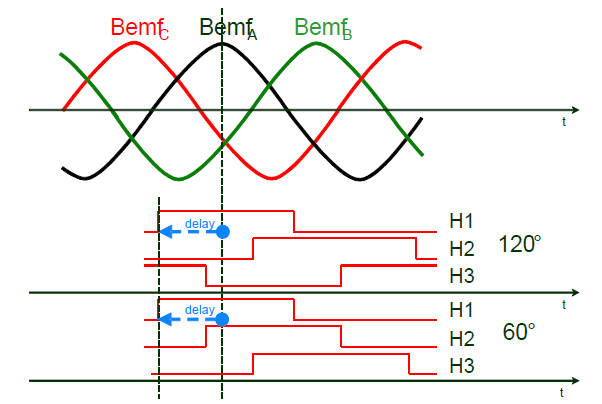
① H1的上升沿对应电机q轴与H1位置电角度夹角为0°,也就是state4->state5的变化点;
② H3的下降沿对应电机q轴与H1位置电角度夹角为60°,也就是state5->state1的变化点;
③ H2的上升沿对应电机q轴与H1位置电角度夹角为120°,也就是state1>state3的变化点;
④ H1的下降沿对应电机q轴与H1位置电角度夹角为180°,也就是state3->state2的变化点;
⑤ H3的上升沿对应电机q轴与H1位置电角度夹角为240°,也就是state2->state6的变化点;
⑥ H3的下降沿对应电机q轴与H1位置电角度夹角为300°,也就是state6->state4的变化点;
d轴永远滞后q轴90°。
电机按上述转向转动,当q轴与电机某相的电角度夹角为0°时,这时磁场由S极切换为N极,磁场强度为0,反电动势从0开始
当q轴与电机某相的电角度夹角为90°时,该相反电动势电压在最高点,夹角为180°时,反电动势电压在最低点。
由上图可以看出q轴与H1位置电角度夹角为0后,继续转动90°电角度后A相反电动势达到最高点,
也就是说①时,q轴与A相电角度夹角为0°,d轴与A相电角度夹角为-90°。
霍尔安装位置与线圈中心重合。
在电机制造中,对给定的H1位置与A相电角度夹角,霍尔实际安装的机械偏角由极对数和电子偏角共同决定。