一.概要
一般在讲解机械臂的时候,我们都会先介绍DH模型,但是DH模型比较抽象,给新手入门会带来一定的困惑,所以在学习机械臂运动学,应该先去学习一下二维空间和三维空间的坐标变换的知识,主要涉及到矩阵运算和坐标向量运算,大家可以找相关方面的书籍看看。然后再来学习DH模型会更好理解一点。
二.机械臂DH模型的表示
在建模的时候会做如下规约,如果关节为旋转关节,则关节坐标系的z轴与旋转关节的旋转轴重合,一般上来讲z轴正方向选取正上方或左侧。
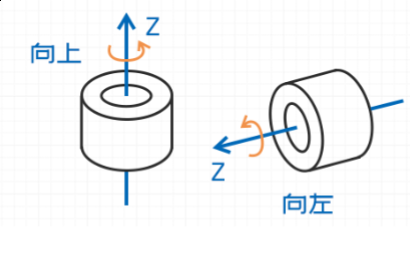
通过右手定则确定X轴和Y轴的方向
1.机械臂的描述方式
*Joint
*每个revolute或prismatic的joint具有1DOF
*每个joint会旋转一定的角度或移动一定的距离。
*Link
*连接joint的杆件,为刚体(不会发生形变)
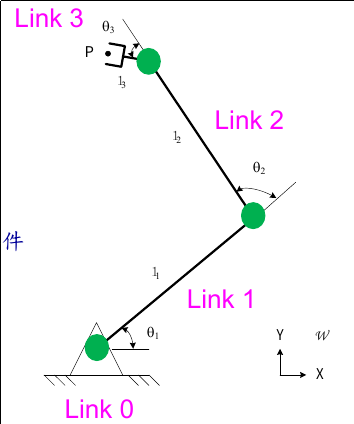
*编号方式
*Link0:地杆,不动的杆件
*Link1:和Lint0相连,第一个可动杆件
*Link2:第二个可动的杆件
*依次类推
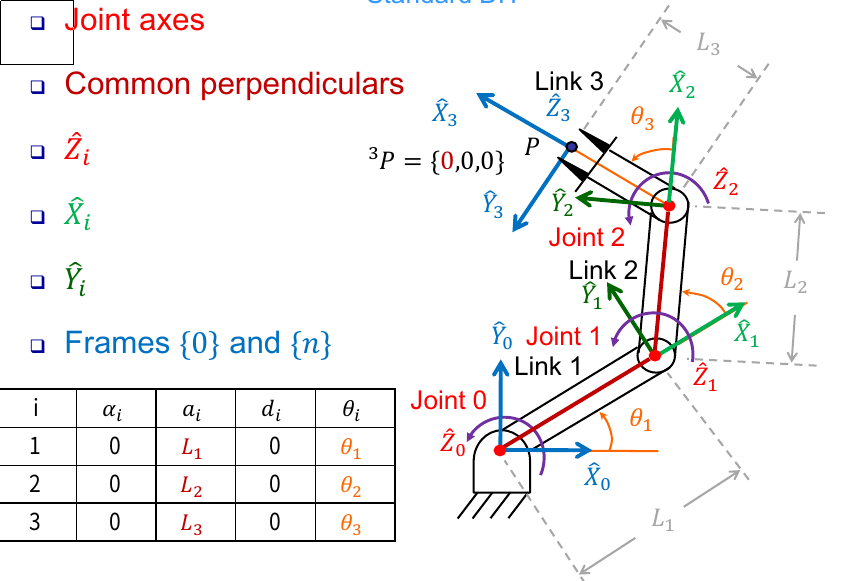
2.DH参数描述
每一关节都可以通过四个参数去表示,(αi, ai, di ,Θi),接下来解释一下各个参数含义
*αi-1:以Xi-1方向看,两个关节Z轴之间的夹角(Zi-1和Zi)。
*ai-1 : 沿着Xi-1方向看,两个关节Z轴之间的距离,两个关节之间会有一个相互垂直的线段,就是这个线段的距离。
*di-1:以Zi方向看,两个关节X轴之间的距离。
*Θi-1: 沿着Zi方向,两个关节之间的夹角。
具体的看下图

例举两个例子
见下图通过DH参数表示各个关节
例1

例2