前面曾经讨论了几种不同的旋转姿态表示法,我们需要将它们与平移变换相结合,创造出一个完整的相对位姿表示方法。两种最实用的表示方法是:四元数向量对和 齐次变换矩阵。
对于向量-四元数的情况,有 ,其中 是坐标系原点相对于参考坐标系的笛卡儿位置, 是坐标系相对于参考坐标系的姿态。其加法定义如下:
取负数为
一个点坐标向量通过下式在坐标系之间变换:
齐次变换矩阵法
另一种办法是可以使用一个齐次变换矩阵来表示旋转和转换。推导方法与二维空间位姿描述描
述的情况类似,但因为增加了 轴,所以进行了扩展:
坐标系原点之间的笛卡儿平移向量是 ,姿态的变化由一个 正交子矩阵 表示,其余向量都表示成齐次形式,这样可以写成
是一个 阶齐次变换。这个矩阵有一个非常特殊的结构,属于特殊的三维欧几里得群,记作 。
三维空间的位姿代数和二维空间有相似性,这里略过。
机器人工具箱中的齐次变换
>> T = transl(1, 0, 0) * trotx(pi/2) * transl(0, 1, 0)
T =
1.0000 0 0 1.0000
0 0.0000 -1.0000 0.0000
0 1.0000 0.0000 1.0000
0 0 0 1.0000
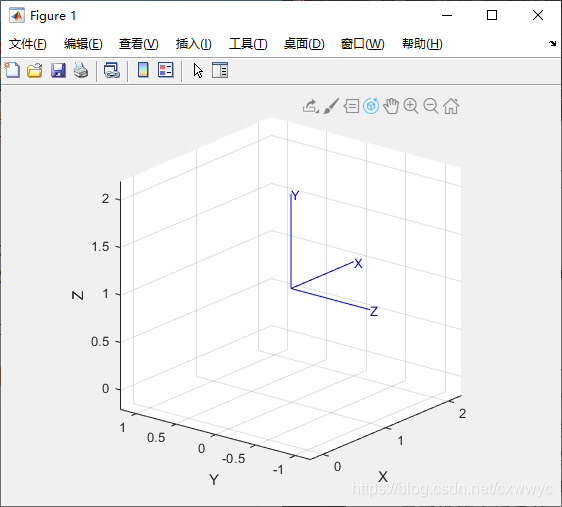
函数transl创建了一个有平移但无旋转的相对位姿,而函数trotx则返回一个绕 轴旋转 的 齐次变换矩阵:旋转部分与rotx(pi/2)相同,平移部分为零。我们可以将以
上函数组合对应的坐标系变化描述如下:首先沿着 轴方向前进一个单位长度,然后绕x轴旋转 ,接着再沿新的 轴,也就是原来的 轴前进一个单位长度。所得矩阵的最后一列,表示了沿原坐标系的 轴和 轴各平移一个单位长度的结果。从最终位姿矩阵的姿态部分,则可以看出是绕 轴旋转的效果。我们可以用如下函数绘制出相应的坐标系:
>> trplot(T)
要提取矩阵T中的旋转矩阵部分,可用
>> t2r(T)
ans =
1.0000 0 0
0 0.0000 -1.0000
0 1.0000 0.0000
平移部分是一个向量,可用以下函数获得:
>> transl(T)
ans =
1.0000
0.0000
1.0000