- 1. 事实汇总
- 2. Introduction
- 3. Method
- 4. Result and Discussion(结果和讨论)
- 5. 图表(Figure and Table)——第一印象
- 6. 结论conclusion、摘要abstract、题目title
- 7. 回复审稿人
创新点
- 理论创新
- 结果创新
- 方法创新
## 写作规范—符号
Latex
- 智能引用clerveref,引用格式带标题,可改引用格式,图、表、式:label 要在caption 之后,才可以正确引用
- bib文件参考文献
- section*{acknowledgement}致谢无章节编号
markdown
[TOC]是目录
SCI论文
- 1. 事实汇总
- 2. Introduction
- 3. Method
- 4. Result and Discussion(结果和讨论)
- 5. 图表(Figure and Table)——第一印象
- 6. 结论conclusion、摘要abstract、题目title
- 7. 回复审稿人
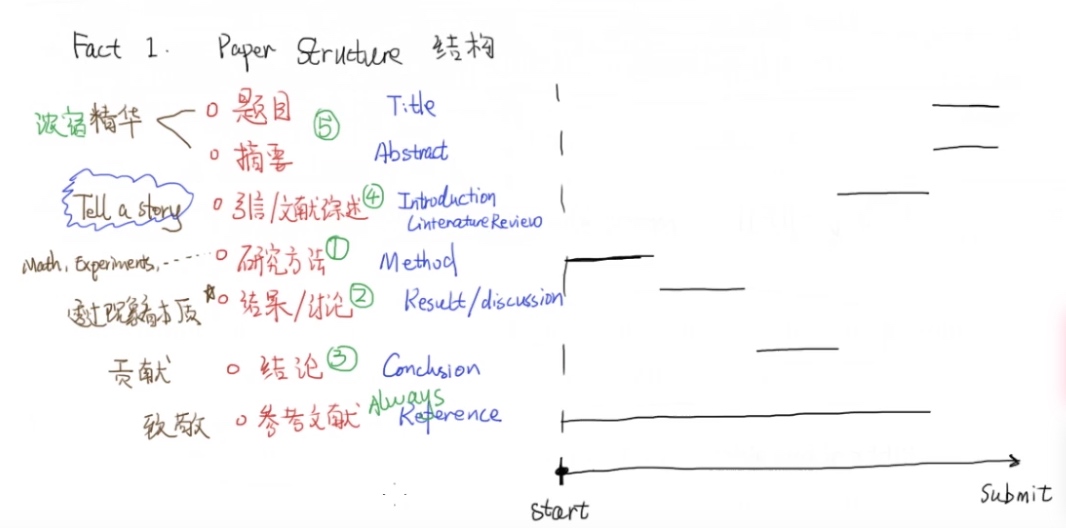
1. 事实汇总
Paper Structure
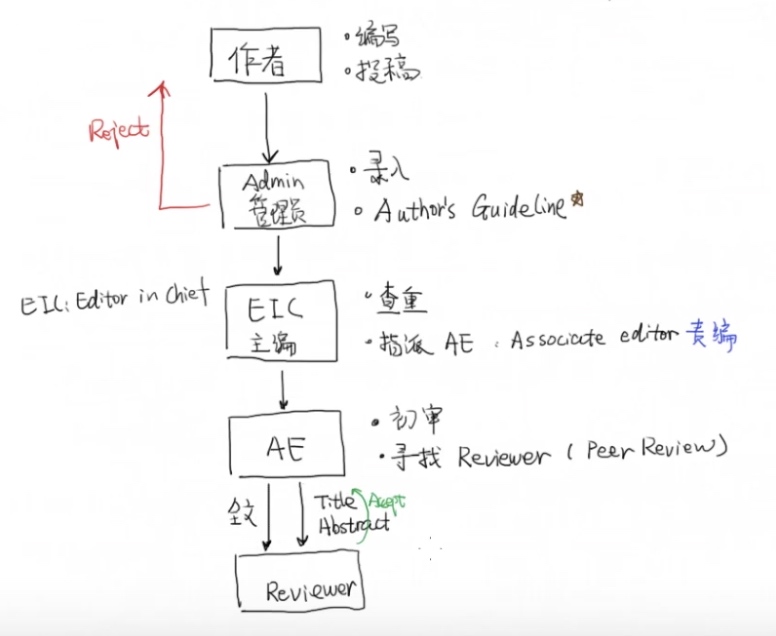
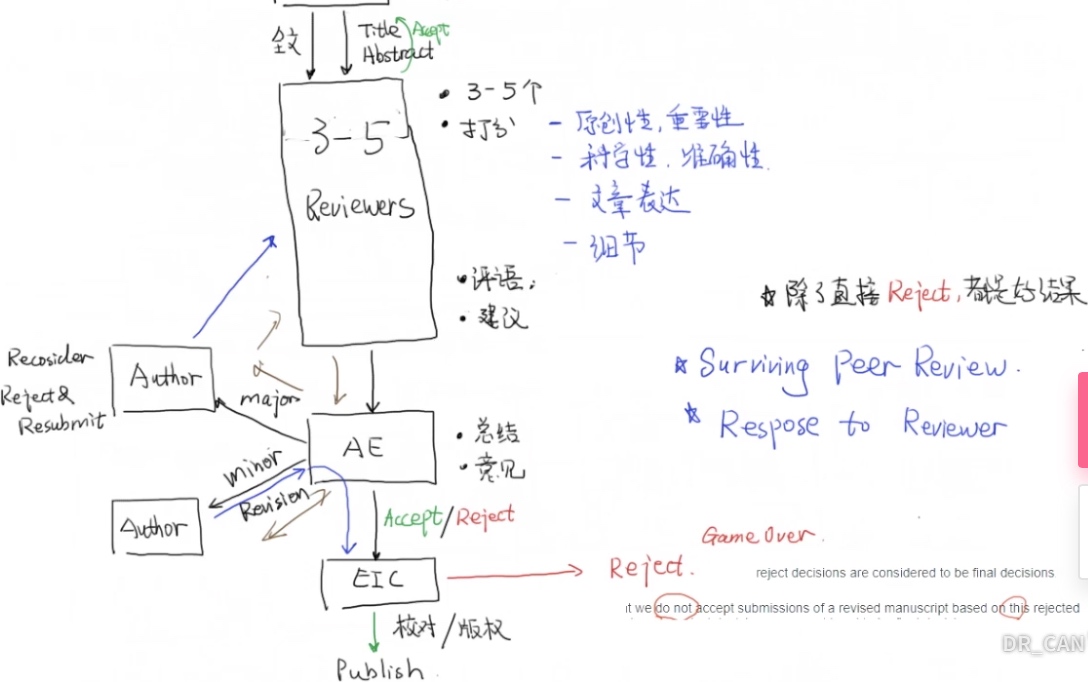
Review Process
文章第一印象
- 图
- 表
- 引用:数量20个、时间新
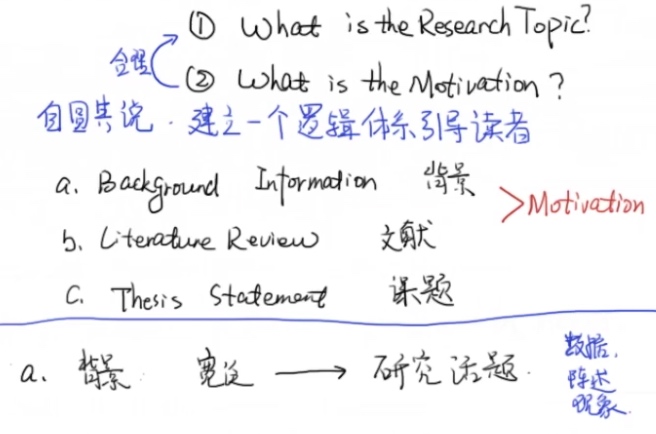
2. Introduction
3. Method
理论:推导过程
实证:调查方法,数据处理
工程应用:理论->实践
提供足够的、准确的,技术细节
包括:架设、数学推导、验证、实验设备

注意:
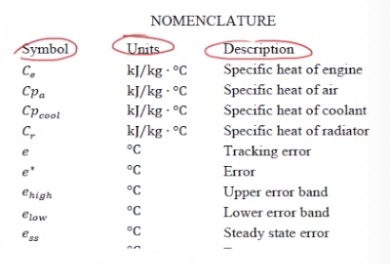
符号一致性,符号、单位、描述
编号更新
4. Result and Discussion(结果和讨论)
5. 图表(Figure and Table)——第一印象
- Author's guide
- 图表必须在论文中解释
- 引用规范,编号(Fig or Figure)
- 一致性
- Caption清晰、准确、完整,不怕标题过长
- 区分数据
- 副标题(a)
- 杜绝一图多投
- 保留原始数据
6. 结论conclusion、摘要abstract、题目title
结论:
总结 Result and discussion,重写,not copy
摘要:
题目:

7. 回复审稿人
调整心态:
两个审稿人给大修:录用比例超过50%
论文没有3天可见
逐一回答每一条意见,每个人可能5页纸
##清晰标明所有文章中的修改
Each comment will be directly addressed regarding the modified manuscript with changes highlighted in yellow
礼貌客气
peer review 没有报酬,感谢和评审时间($$$)
The co-authors and I would like to thank you for the time and effort spent in reviewing the manuscript.
同意:The authors would like to thank the reviewer for the suggestion, ……
The authors would like to thank the reviewer's comment on this problem,……
不同意:委婉表达,不要怼回去
The reviewer's statement is correct in that …… However, the authors wish to ……
corresponding work in the near future and will publish it at a later time.
The reviewer's comment is very useful and profound. However, the current effort
问题分类
最多的问题:
文字、图标样式修改
研究背景:abstract introduction conclusion
添加引用文献的要求:
忽略了重要工作,慎重对待,讨论并引用
添加审稿人的研究工作
最难的问题:
创新性:别人做过,方法新,没有支撑
实验细节问题:加补实验
- 设计其他实验的实验结果解释审稿人的问题,
- 文献说明实验困难
- 有其他证据证明文中观点
回复Reviewers 时间
1week-1month
必问问题
文章背景相关
整个领域的贡献
与重要文献的关系
浏览文章图表
novelty创新性
重视Introduction
实验细节
每一句话都有实验数据或者文献支撑
Rejection的冲动
数学工程错误
明显剽窃
错字错词多,图表潦草
一稿多投,明显雷同
不要夸大其词
图片信息量太小,灌水
文章好感度爆棚
描述问题清楚,逻辑清楚
格式标准,图表清晰
模拟实验均具备
尽力按照审稿人修改
怼回去
基础:审稿人吹毛求疵拒稿、编辑很欣赏
- 回答好意见,补充漏洞
- 只批评没建议,结合其他审稿人正面的意见来反驳
- 审稿人的漏洞
- 礼貌不谦卑,反驳不吵架