Tips
MVS: Multi-View Stereo
Abstract
- 思路:一般的局部立体方法是一个具有整形数值视察(disparity)的支持镜头进行匹配,其中有一个隐藏的假设:再支持区域的像素中具有恒定的视差。这个假设在倾斜的表面是不成立的。
- 每个像素有一个单独的3D平面。
- 除了PatchMatch的空间传播方法外,还有
- 在立体中左右视图传播的图传播。
- 时间传播,从视频的前和连续帧中传播平面。
- 倾斜支持窗口可以用来计算全球立体方法的代价,允许明确的遮挡处理,可以处理大的非纹理区域。
- 重构了高度倾斜的表面,并以亚像素精度实现了视差细节。
Introduction
原来局部立体匹配中,恒定时差不太可能发生的原因有二:
- 支持的窗口包含与中心像素位于不同表面的像素。
- 窗口捕捉到倾斜的表面,不是fronto-parallel。
- [ ] ??? 这篇论文提出了一种基于PatchMatch的算法,有效地解决了在每个像素点找到一个“好的”倾斜支持平面的问题。与其他局部算法相比,算法没有构建完整的cost-volume,这在本论文算法中是不可能的,因为标签空间包含了无限个3D平面。相反,算法巧妙地遍历了其中的一部分。这使得一次优化成为可能,平面以及分配给平面的像素能够联合估计,这有效地绕过了错失正确平面的问题。PatchMatch本身就是一个近似稠密的最近邻算法。这篇论文利用随机搜索和传播的PatchMatch思想来寻找平面极线上的最近邻。这使得能够处理倾斜的表面和亚像素精度。
Algorithm
对于两张图像中的每个像素(p), 寻找一个平面(f_p),视差公式:
[d_p = a_{f_p}p_x+b_{f_p}p_y+c_{f_p} (1)
]
总的优化函数如下:
[f_p = argmin_{finxi}m(p,f)(2)
]
其中(xi)表示所有可能的平面,它的大小是无限的。
代价公式如下:
[m(p,f)=sum_{qin W_p}w(p,q)
ho(q, q-d_p)
]
其中(W_p)表示以像素(p)作为中心的方形窗口。但是与现有方法不同,(W_p)不再是2D的,而是3D的。权重函数(w(p,q))用来解决边缘育肥问题,并且实施自适应支持权重的思想,它通过像素之间的颜色来计算他们之间的相似性:
[w(p,q) = e^{-||I_p-I_q||}
]
其中,(||I_p-I_q||)计算像素(p)和(q)在RGB空间的L1距离。
现在来关注( ho(q,q'))部分,首先根据平面(f)计算像素(q)的视差,并且从(q)的x坐标减去这个视差得到在另一张图上的匹配点(q'),函数( ho(q,q'))用来计算像素(q)和(q')之间的不相似性:
[
ho(q,q')=(1-alpha)min(||I_q-I_{q'}||, au_{col})+alpha min(||-||, au_{grad})
]
2.2 PatchMatch计算视差
随机初始化
给两张图像的一个像素的一个随即平面。
- Somehow,得到一个随机平面的一个点(P(x_0, y_0, z_0))。
- 然后计算平面法向量(n=(n_x, n_y, n_z))
- (a_f=-n_x/n_z)
- (b_f=-n_y/n_z)
- (c_f=(n_xx_0 + n_yy_0+n_zz_0)/n_z)
迭代和传播
四种步骤。(1). spatial propagation, (2). view propagation, (3). temporal propagation, (4). plane refinement。
首先处理左图的所有像素,然后处理右图的所有像素。
- 在奇数次迭代中,从左上角的像素开始,逐行遍历。
- 在偶数次迭代中,颠倒顺序。
Search
简单三步骤
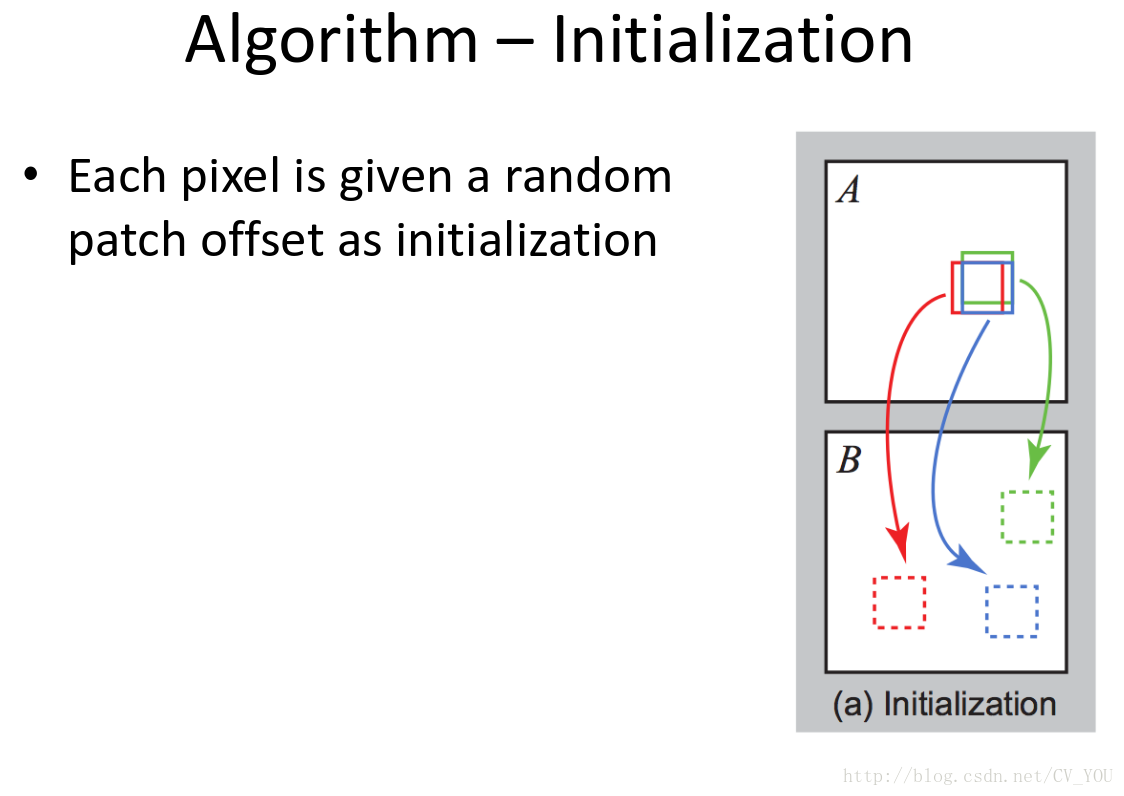
- 初始化:两张图A和B,将A图中的每一个像素,随机赋予一个偏移量,在B图中找到一个与之对应。
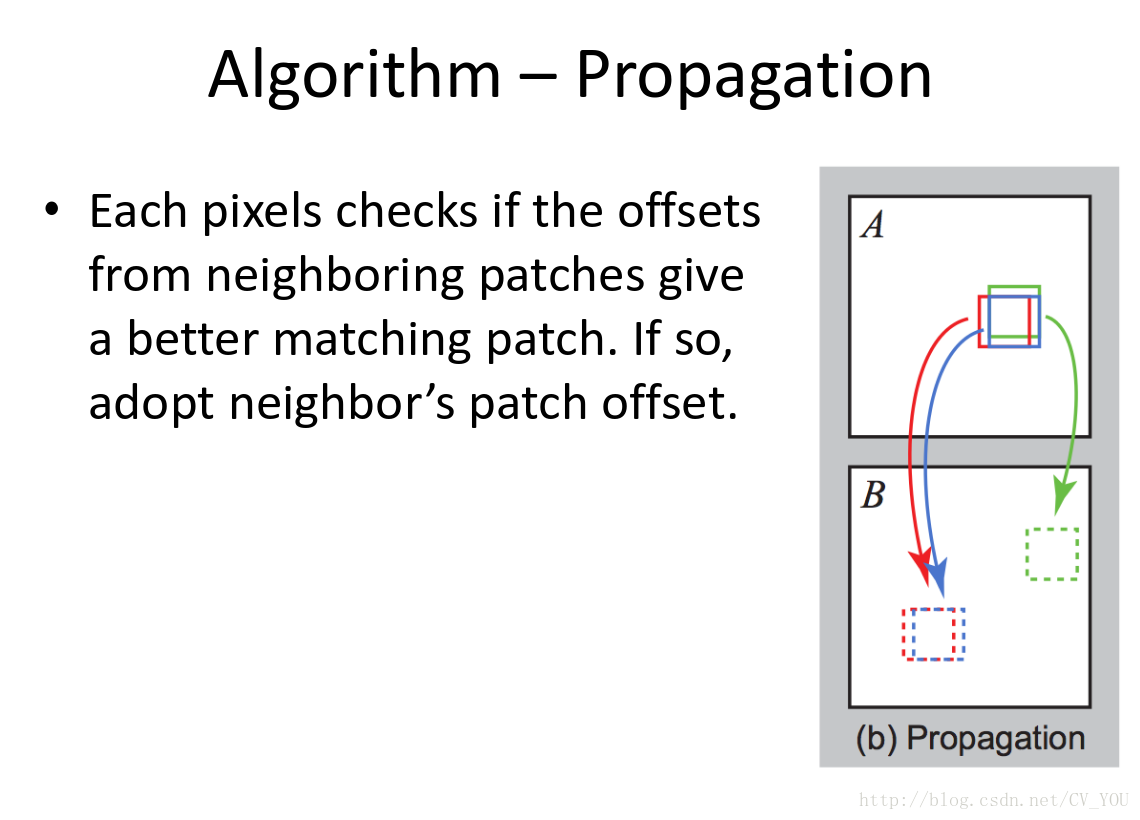
- 传播:每个像素检查来自相邻块的便宜是否提供了更好的匹配,如果是则采用邻居的偏移量。
- 搜索:每一个像素点在以现在的偏移量位中心的同心圆内部,找到一个更加匹配的偏移量。
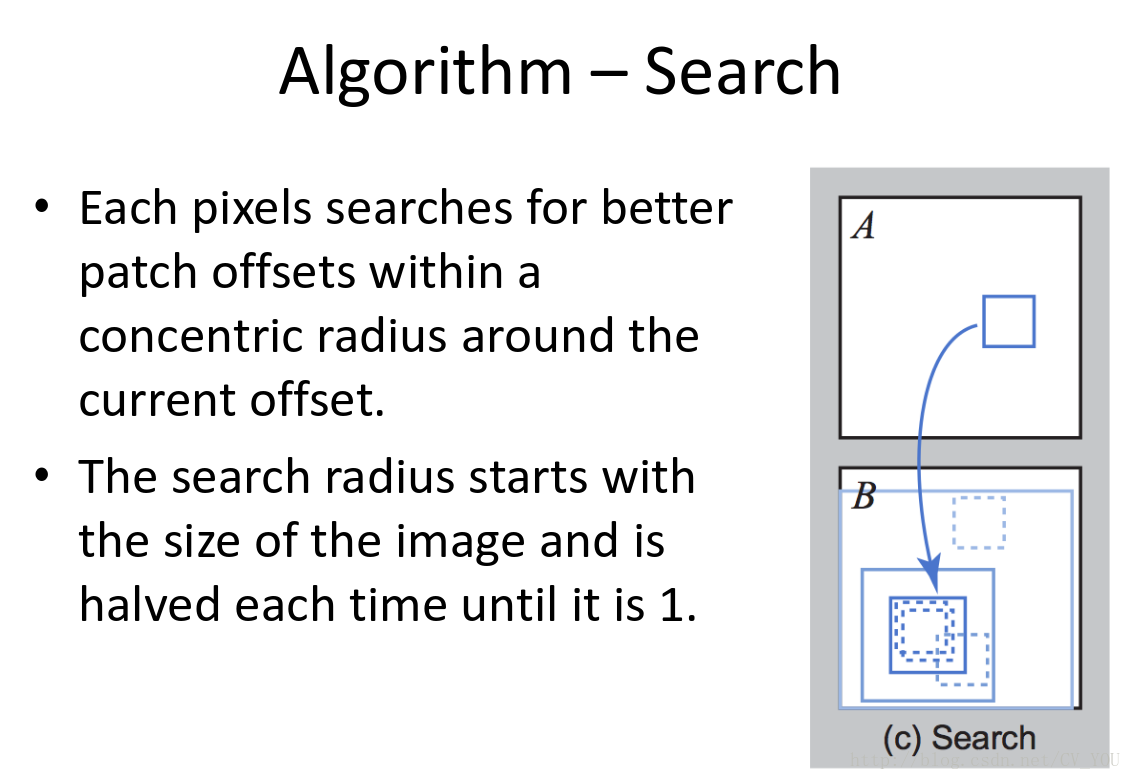
搜索的半径以图片为尺寸,然后以1/2的收敛速度减少,直到半径为1.