Abstract
Sem-LS在杂乱无章的环境表现更好.
我们在KITTI和KAIST URBAN上标注.
1. Introduction
高级的语义例如 road markings和street lambs(路灯)可以被稳定的检测, 但是稀疏了.
两个要求:
- 完整和直的物体或者结构
- 有稳定的语义定义
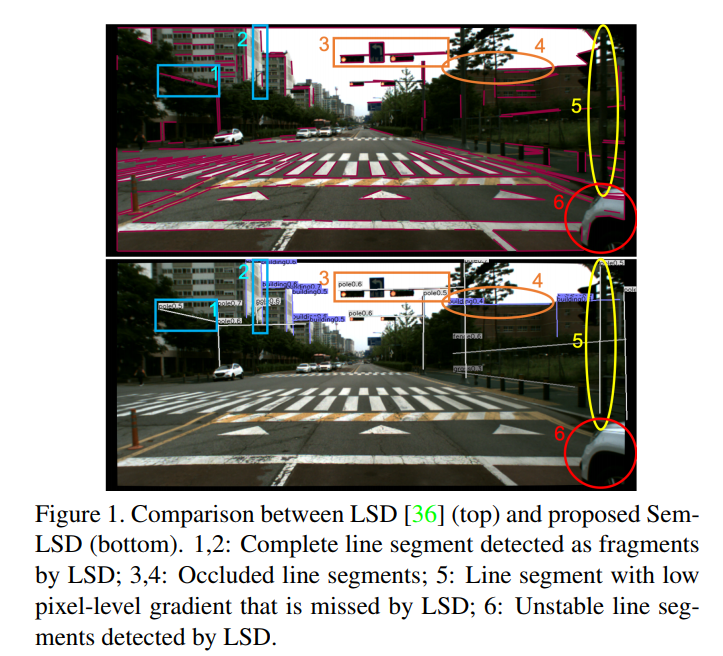
Wireframe 需要节点, 被Sem-LSD估计避免了, 因为觉得不鲁邦.
我们开发了一个end-to-end learning-based Sem-LSD.
一个轻量级的Sem-LSD可以跑160fps在商用GPU上.
我们也在随机仿射变换的测试图上实验, Sem-LSD比现在的好15%.
Contribution
- 一个新的基于学习的线状图像表示, Sem-LS.
- 两个标注好的数据集.
- 展示功效, 有超出15.08%的重复度和超出16.01%的回环召回.
2. Related Work
现存的线状图像表示: 现存两种, line segments, 和 wireframes. 线段是基于low-level特征, 比如像素梯度, 而线框是线段和它们的节点组成的.
语义线和语义边缘: ...
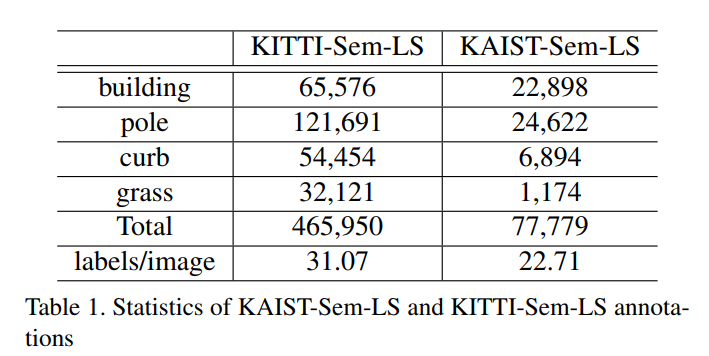
3. Sem-LS Dataset
我们标注了KITTI-Sem_LS和KAIST-Sem-LS.
为了提升手工标注的精度, 我们采用基于梯度的纠错. 对于每个标注 (S), LSD被用来搜寻是否存在检测 (S_{lsd}). 两者的重叠要 > 0.95.
我们用ACL来计算重叠. 如果(S_{lsd}) 存在的话, 我们用 (S_{lsd}) 代替 (S).
背后的基本原理(rationale)是因为在, 有些情况下, 视觉上突出线段确实有最大的像素梯度.
4. Sem-LS Detection
4.1 Sem-LS encodings
现存的线框解析模型预测节点位置和线热度图, 然后结合来获得最终的检测.
我们有两个Sem-LS encodings, AngMidLen 和 LineAsObj.
- 第一个编码了Sem-LS的几何, 通过跟x-axis的夹角, 重点位置和长度.
- 第二个, 用对角线的最小bounding box.
4.2 Sem-LS Detector

我们在一个最近的anchor-free的监测器CenterNet上建立Sem-LSD.

6. Experimentations
...
7. Conclusion
为了解决Sem-LS的检测问题, 我们弄了两个数据集, 一个实时的检测器, 定制化的BAM和ACL来衡量.