Structure Inference Net: Object Detection Using Scene-Level Context and Instance-Level Relationships
2018-09-07 20:38:10
code:http://vipl.ict.ac.cn/view_database.php?id=6
Introduction:
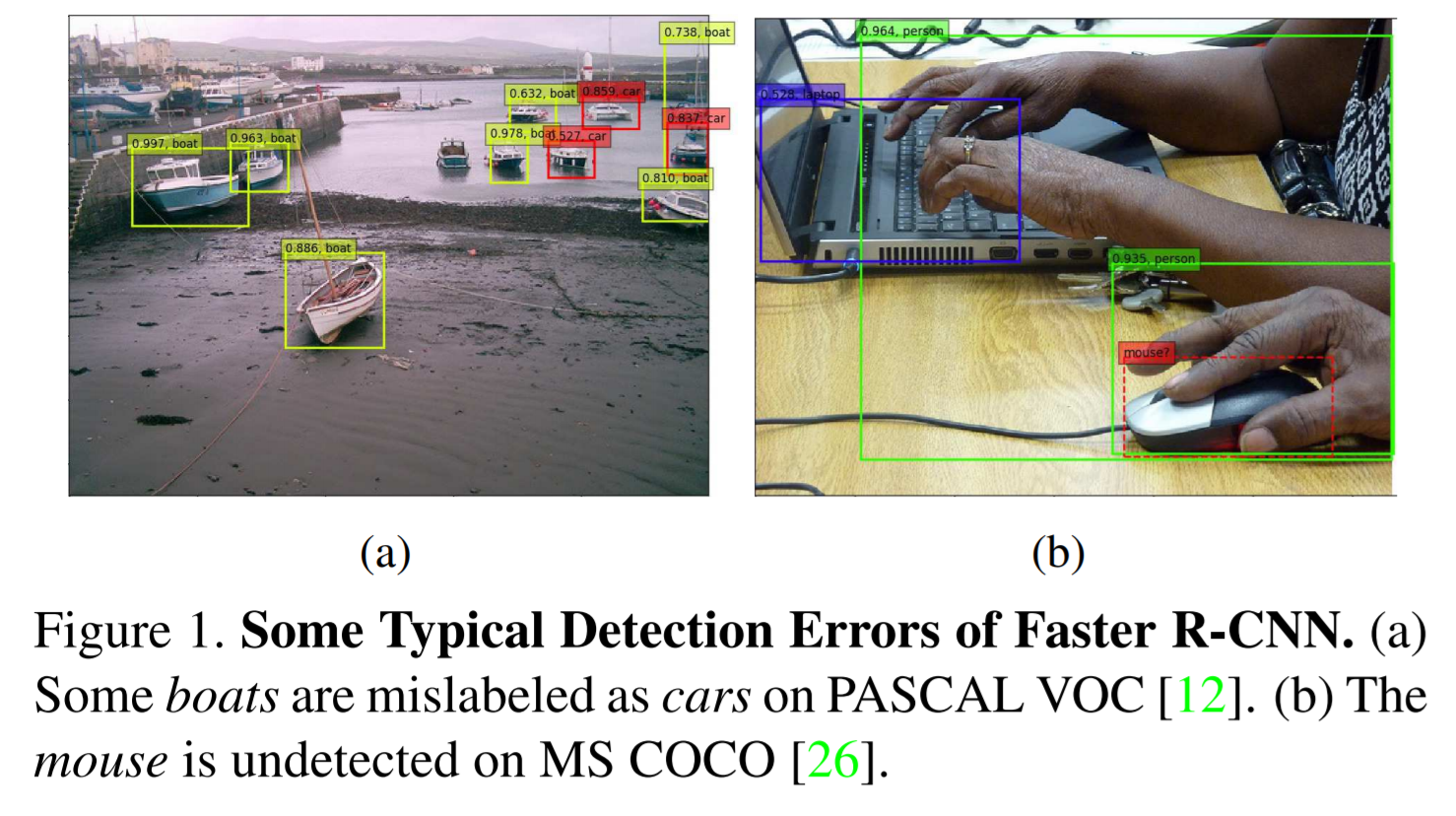
本文在物体检测尝试结合场景信息,以及 物体之间的关系 来进一步的提升检测结果。

文章的流程如下所示:
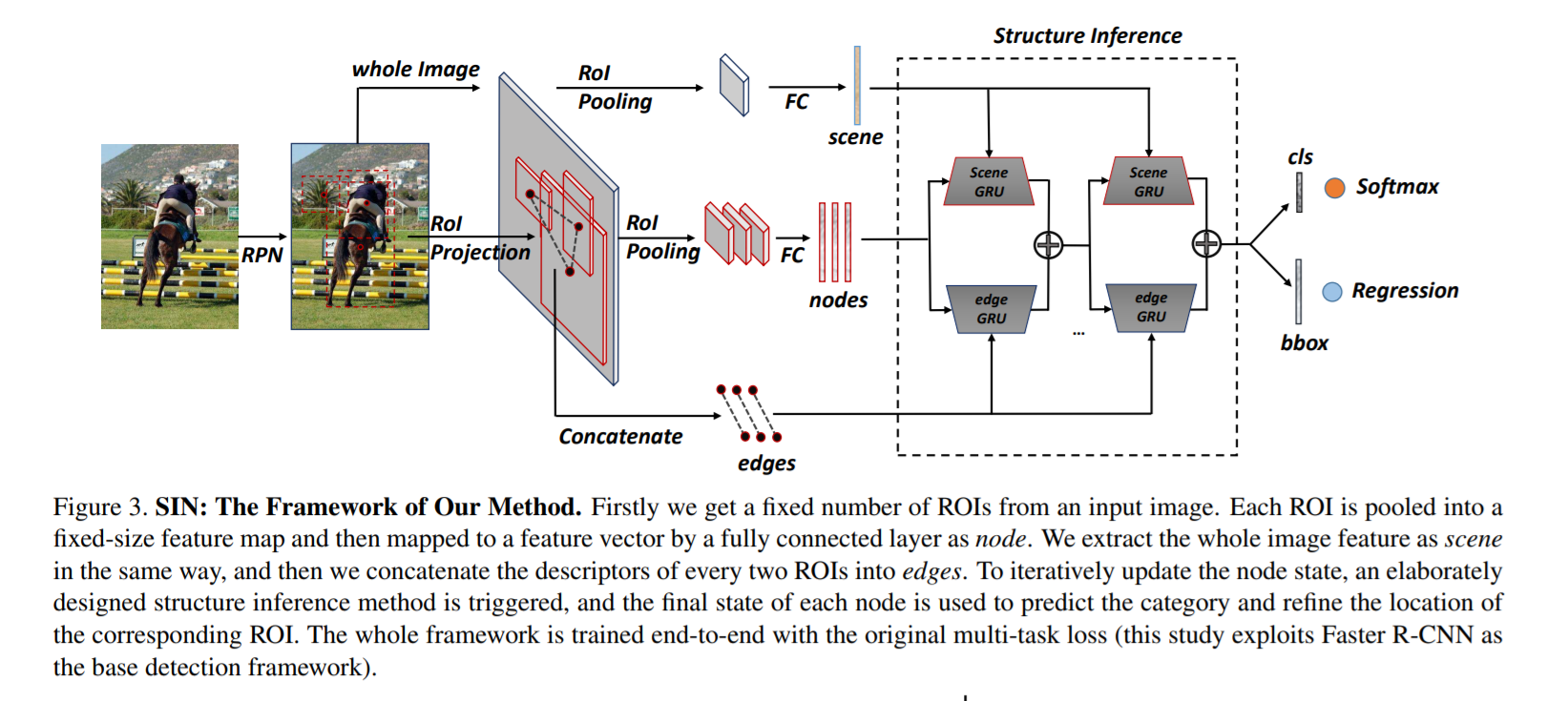
大致过程可以表达为:
1. 首先利用 RPN 进行 proposal 的提取;
2. 将整幅图像的 feature 传入到 fc layer 中,得到对应的 scene 的 feature;
3. 利用 roi pooling, 得到 proposal 对应的 feature map,然后传入到 fc 中,得到向量化的 feature;
4. 利用不同 proposals 之间的空间关系,来学习 edges 的信息;
5. 将上述信息分别传入到 scene GRU 以及 edge GRU 中,得到增强之后的 feature,然后进行 BBox 的分类及回归;
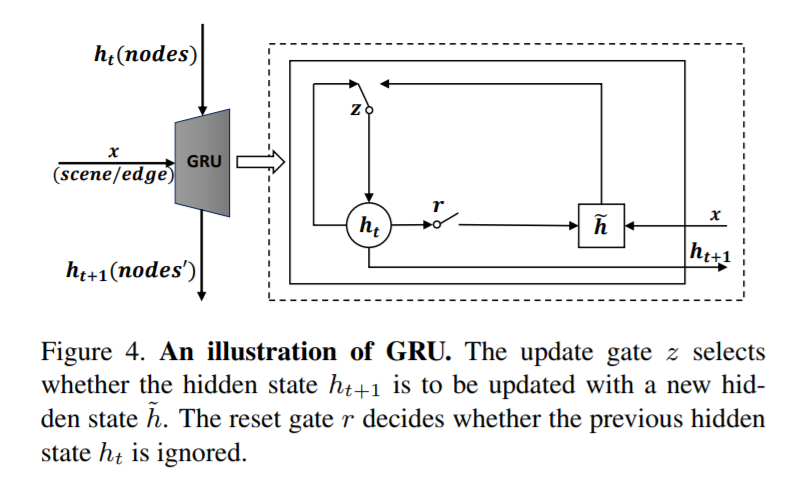
其中关于 GRU 的介绍如下所示:
该网络中的 structure inference 部分为:

对于每一个 proposal,我们这里看到上图中的 vi, 那么该 proposal 的 feature 为:fiv,给定 scene 的 feature,那么将这两个信息输入到 scene GRU中,得到基于场景的 feature;
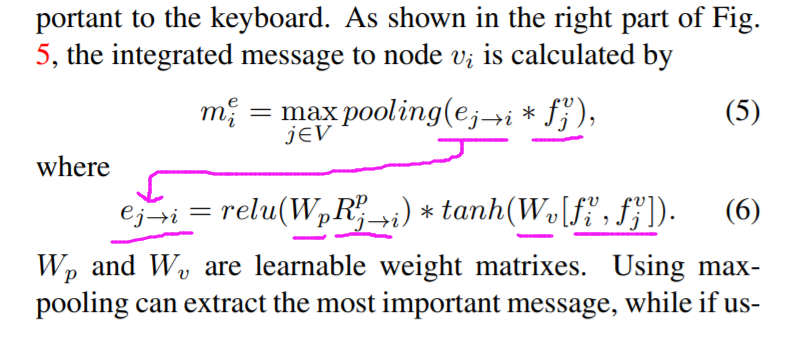
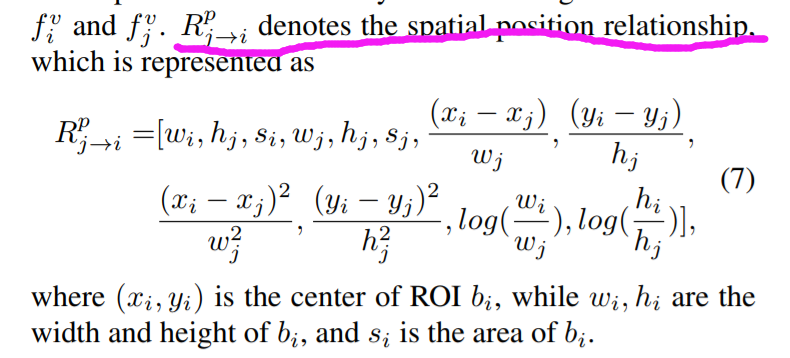
将不同 proposal 之间的关系,建模到模型中,那么:
根据空间位置信息,得到 R;
然后根据 R,我们可以得到 e,然后就可以进行 max-pooling,然后得到 m;
将该信息传到 edge GRU,得到 hidden state;
然后将 scene GRU 以及 edge GRU,得到的状态,在进行结合:


==