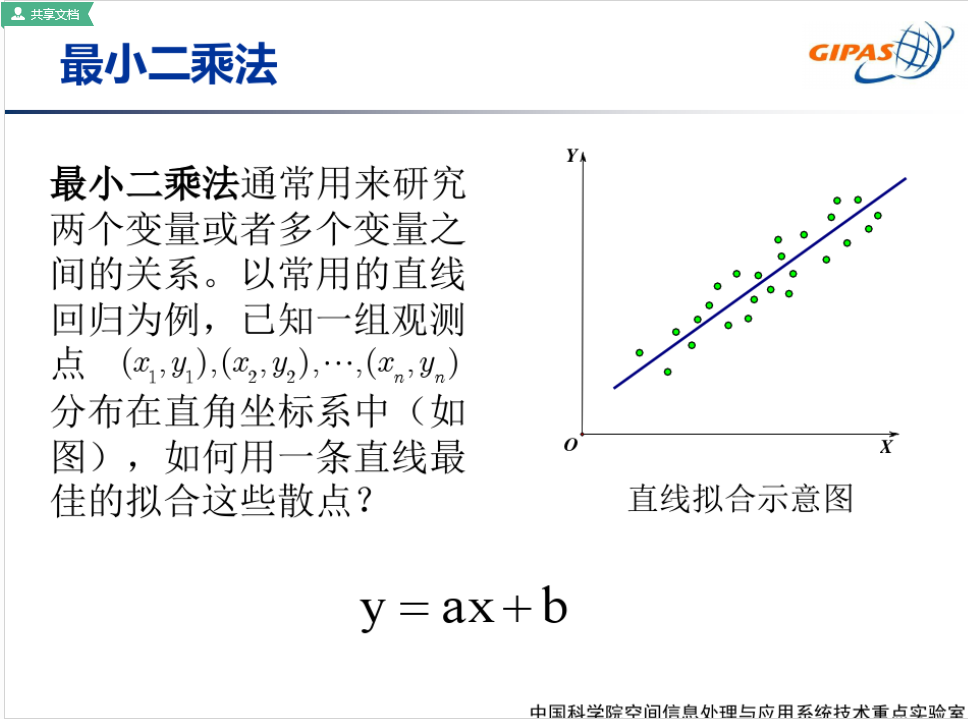
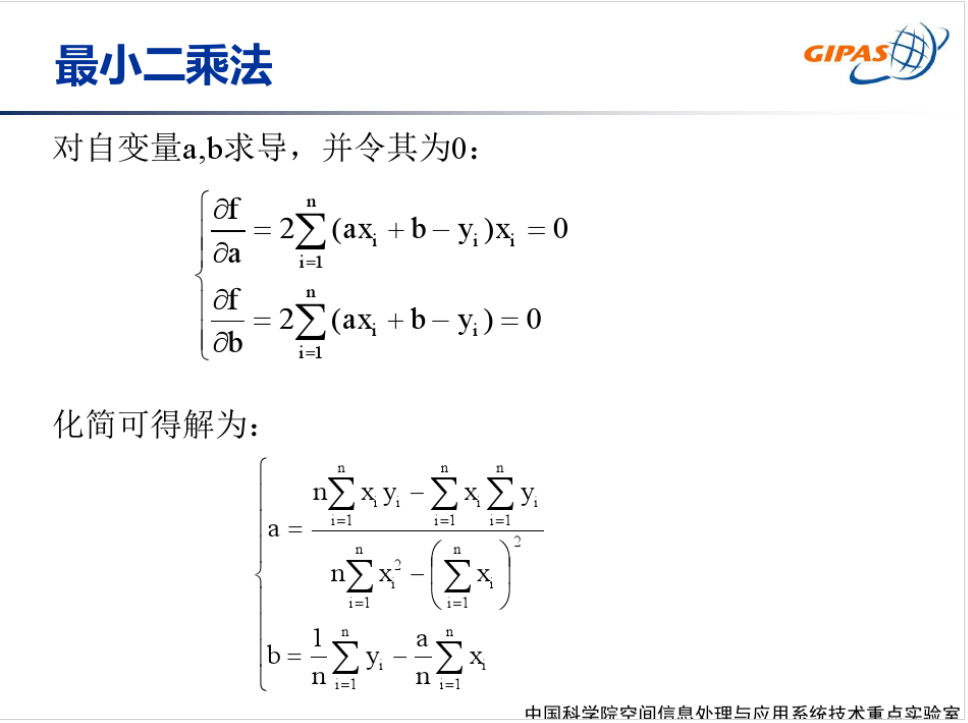
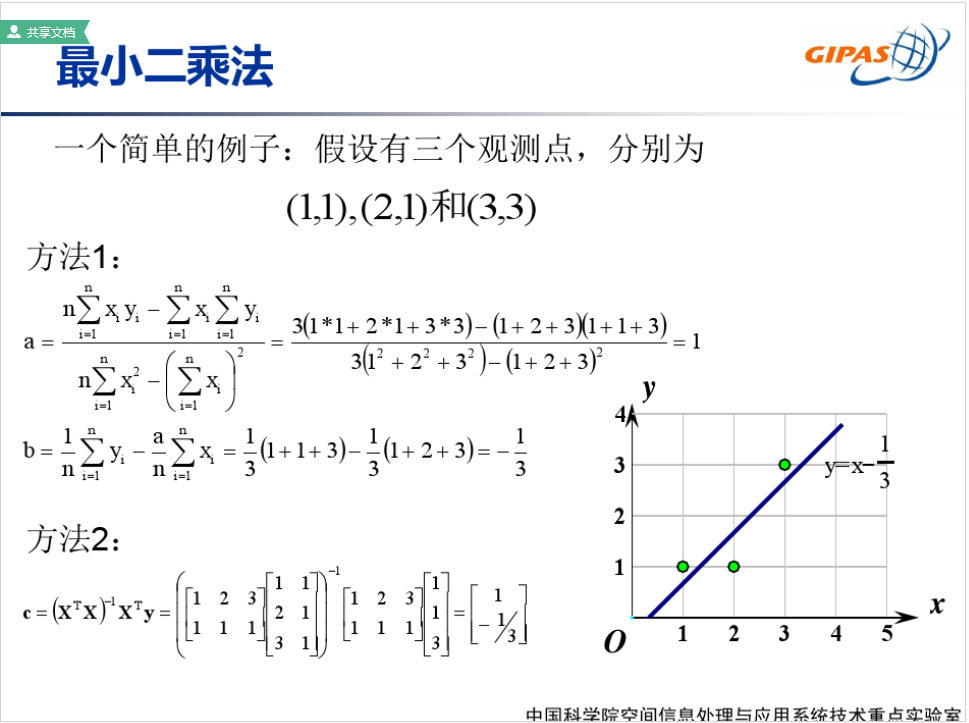
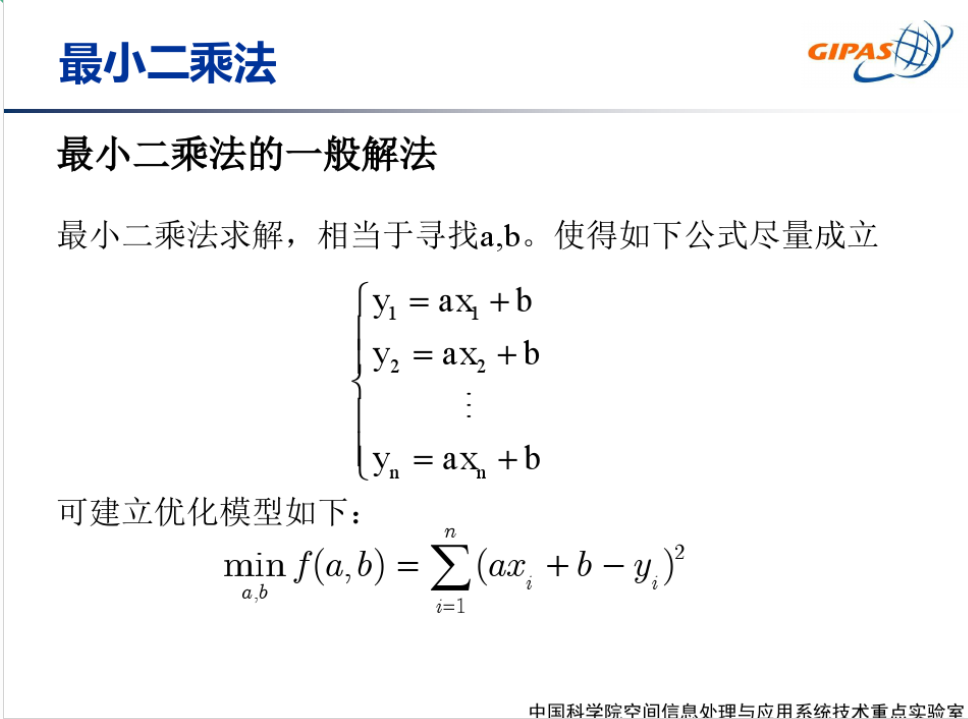
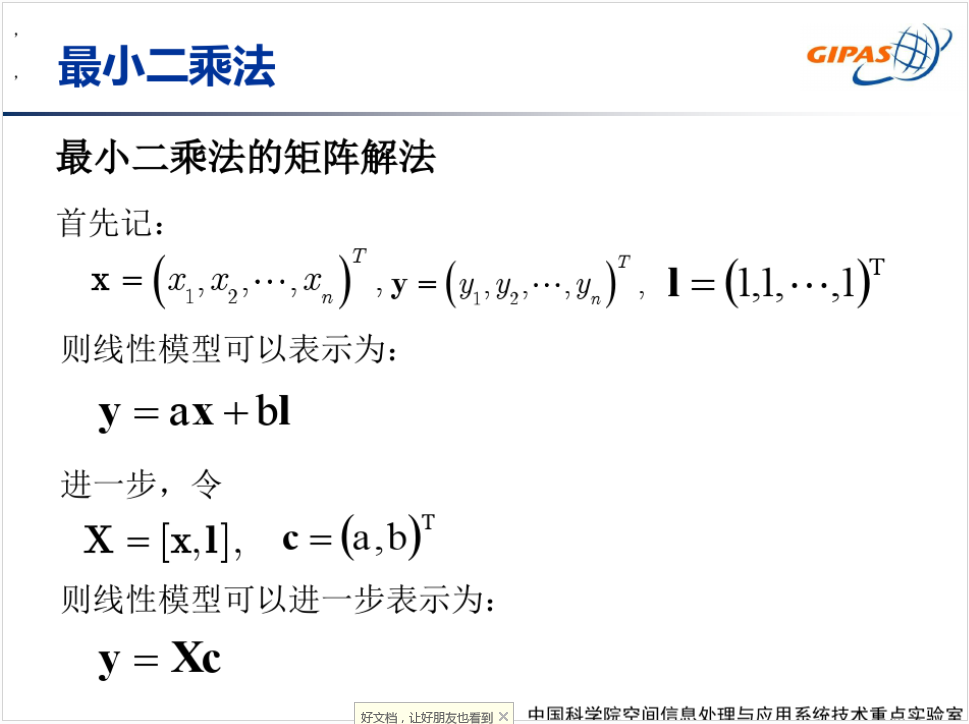
1.公式推导
PPT参考自:中国科学院的PPT ,矩阵解的具体推导过程见博客。
 |
|
 |
|
 |
 |
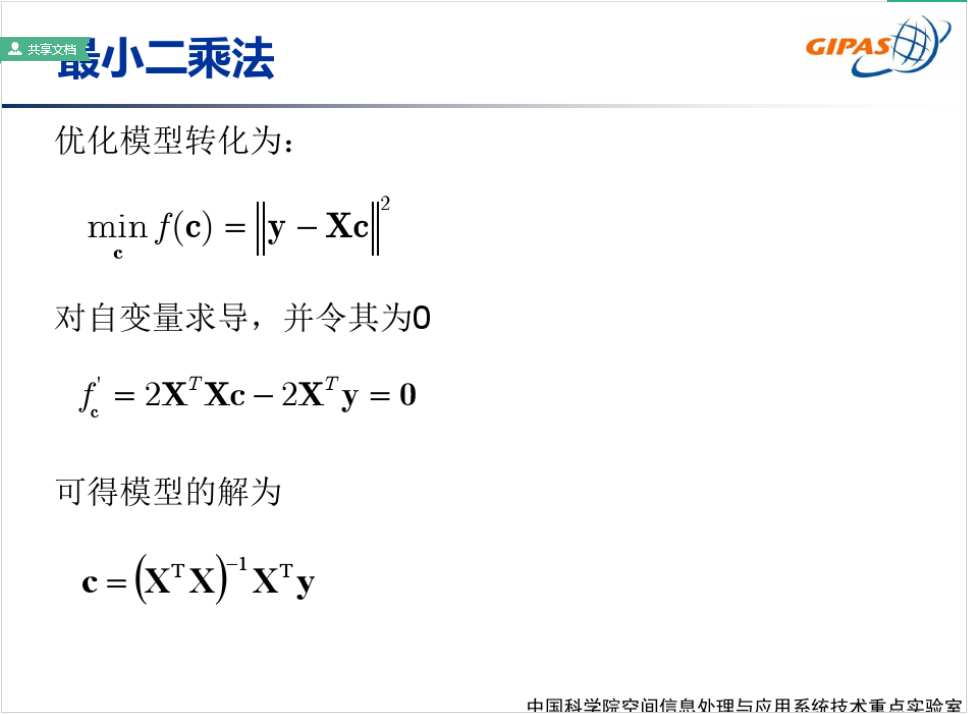
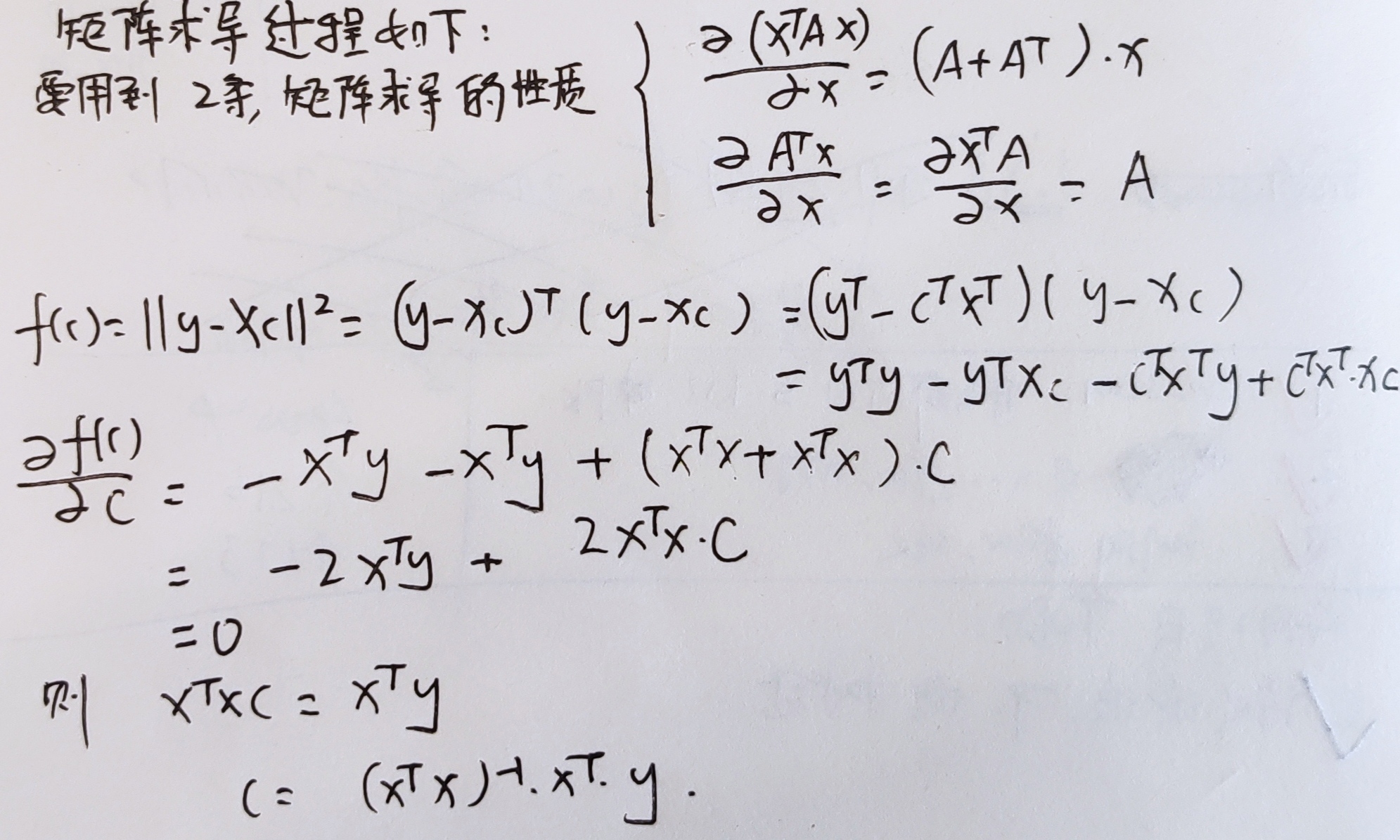
其中残差函数矩阵 f(c) 求导的过程推导如下,需要用到矩阵求导的2条结论
2.两种最小二乘法的平面拟合MATLAB代码对比
1)用传统的∑方式求平面方程z=ax + by + c的参数


1 function [ a,b,c ]=FitPlane( input_X , input_Y , input_Z) 2 3 % FileName : FitPlane 4 % CreatDate : 2018/7/10 5 % Describe : Least square fitting plane equation 6 % OutputPara : a,b,c 7 % Note : Plane equation: z=a*x+b*y+c 8 % Author : wellp 9 10 X1=0;Y1=0;Z1=0;X2=0;Y2=0;X1Y1=0;X1Z1=0;Y1Z1=0; 11 num=length(input_X); 12 if num<3 % less than 3 points can't fit the plane 13 a=-8888; 14 b=-8888; 15 c=-8888; 16 else 17 for i=1 : num 18 X1=X1+input_X(i); 19 Y1=Y1+input_Y(i); 20 Z1=Z1+input_Z(i); 21 X2=X2+input_X(i)^2; 22 Y2=Y2+input_Y(i)^2; 23 X1Y1=X1Y1+input_X(i)*input_Y(i); 24 X1Z1=X1Z1+input_X(i)*input_Z(i); 25 Y1Z1=Y1Z1+input_Y(i)*input_Z(i); 26 end 27 28 N=num; 29 C=N*X2-X1*X1;% X2!=X1*X1 !!!!!!! 30 D=N*X1Y1-X1*Y1; 31 E=-(N*X1Z1-X1*Z1); 32 G=N*Y2-Y1*Y1; 33 H=-(N*Y1Z1-Y1*Z1); 34 35 a=(H*D-E*G)/(C*G-D*D); 36 b=(H*C-E*D)/(D*D-G*C); 37 c=(Z1-a*X1-b*Y1)/N; 38 39 end 40 end
2)用矩阵的形式求解同样的问题。用多组示例测试,2)求出的Xpara确实等于1)求出的 [a, b, c]。
1 function [ Xpara ]=FitPlane( input_X , input_Y , input_Z) 2 % FileName : FitPlane 3 % CreatDate : 2018/7/10 4 % Describe : Least square fitting plane equation 5 % OutputPara : Xpara 6 % Note : Plane equation: z=a*x+b*y+c 7 % Author : wellp 8 9 X = input_X'; 10 Y = input_Y'; 11 I = ones(size(input_X')); 12 A = [X, Y, I]; 13 b = input_Z'; 14 Xpara = (A' * A) ^ -1 * A' * b; 15 16 end
苍了天了,矩阵也太TM的简洁了吧,上述问题的矩阵的推导如下:

3.线性最小二乘和非线性最小二乘的讨论
1)概念区别
线性最小二乘问题:问题可以抽象成线性数学模型,例如直线拟合 y = ax + b、平面拟合 z = ax + by + c,这类线性问题也就可以写成前述的矩阵形式
非线性最小二乘问题:问题为非线性数学模型,无法写成前述的矩阵形式
2)正规方程
对于线性最小二乘问题:为了获得更可靠的结果,测量次数 总要多于未知参数的数目 ,即所得误差方程式的数目总是要多于未知数的数目。因而直接用一般解代数方程的方法是无法求解这些未知参数的。最小二乘法则可以将误差方程转化为有确定解的代数方程组(其方程式数目正好等于未知数的个数),从而可求解出这些未知参数。这个有确定解的代数方程组称为最小二乘法估计的正规方程(或称为法方程)。
3)解法区别
线性最小二乘问题:
a.可以直接通过对残差函数求导数(偏导),令导数(偏导)等于0获得残差函数的极小值,进而解得待求参数
b.如果问题写成了前述的矩阵形式,则求解矩阵即可。当参数矩阵较小时,可以直接解前述的正规方程ATAx=ATb,x = (ATA)-1ATb进行求解;当参数矩阵较大时,求逆矩阵的耗时较大,一般通过QR分解,Cholesky分解,SVD分解进行求解。
非线性最小二乘问题:
无法直接写出导数或者导数过于复杂;因为无法写成矩阵的形式,也无法通过上述矩阵分解的方法求解。一般通过一阶梯度法(最速下降法)、二阶梯度法(牛顿法)、高斯牛顿法、LM(Levenberg-Marquardt Method)法进行迭代求解。