
大家过年好,我是力争把风螺旋写进规范的刘崇军,祝大家狗年兴旺,心想事成!
今天想要跟大家分享的是飞行程序设计中的基线转弯保护区的计算方法。
首先再来总结一下,风螺旋算法是一种公式化的、适合计算机自动化处理的螺旋线计算方法。在飞行程序保护区中应用风螺旋计算方法,核心的步骤是确定风螺旋的初始参数,并依据初始参数计算风螺旋切线、公切线的位置点,将这些位置点进行连接即形成飞行程序保护区。
基线转弯程序是进场阶段所使用的一种反向程序。它的主要特征是:航空器沿某个角度出航,通过计时或定位点确定开始转弯的位置,通过一段连续的转弯实现对正跑道方向,衔接中间进近和最后进近航段(图1 中从a点开始的蓝色实线轨迹)。
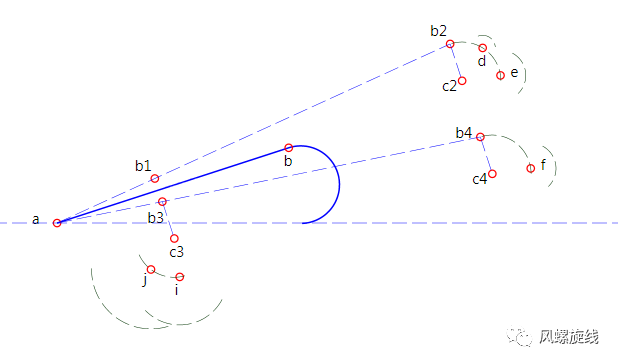
图1 基线转弯基础结构
在基线转弯保护区中,通过计算来确定 b 点的最早点(b1、b2)时,采用的计算公式为 ab1= (t-5)(v-w') - zN。这里的 t-5 (个人倾向于理解为)计时误差(-10)秒钟加上建立坡度时间(+5)秒钟,合并起来是 t-5 秒钟。从计算过程来理解,计时误差可当做提前10秒或推后10秒。计算最早点时,使用的是提前10秒的位置,即从 b 点倒退10秒的距离,再加上5秒的建立坡度时间,总和为b 点之前(-5)秒的位置。(在计算风螺旋初始参数时,每一秒都很重要,直接决定切线位置的准确性,所以,每次的讨论中都需要对计时的原理进行说明。)
最晚点的计算公式为 ab2 = (t +21)(v-w') +zN。这里的21秒是 计时误差(+10)秒、建立坡度时间(+5)秒、驾驶员反应时间(+6)秒的总和。
基线转弯保护区中按照风螺旋的圆心点来划分(如图2所示),一共可以找到5条风螺旋,分别是c2、c3、c4、c5点以及基线进入段的风螺旋(暂用c1来表示)。
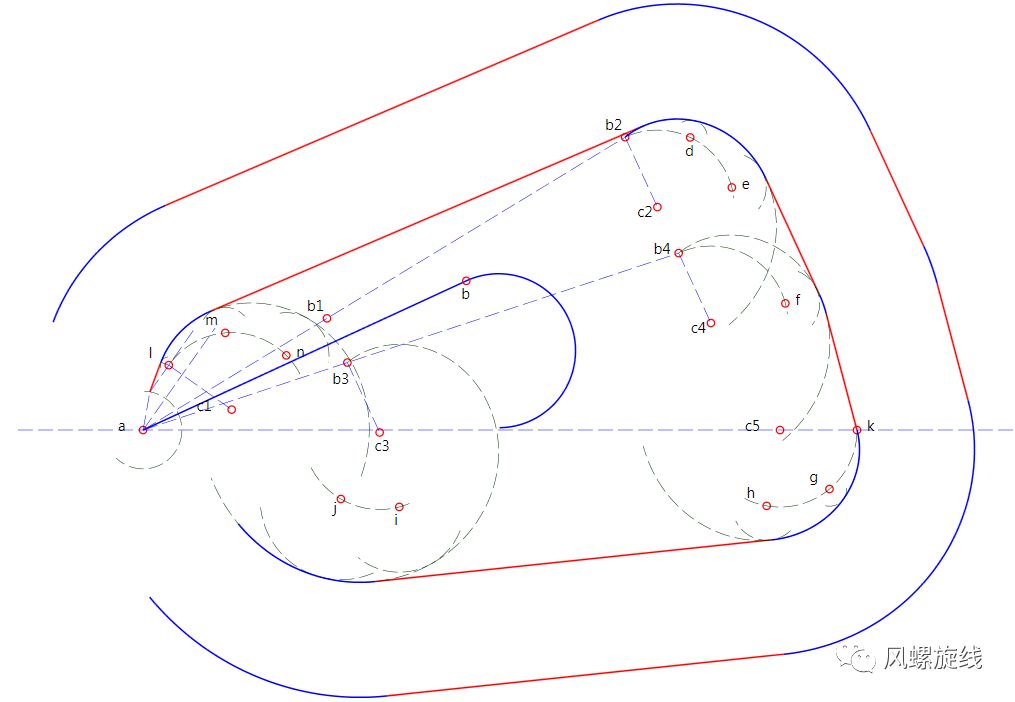
图2 基线转弯保护区中的五条风螺旋
c2、c4风螺旋是转弯最晚点开始绘制的风螺旋,c3风螺旋是从转弯最早点开始绘制的风螺旋。c5风螺旋是从进近方向(跑道延长线上)开始绘制的风螺旋。c1风螺旋是从入航段开始绘制的风螺旋。
基线转弯保护区中较难理解的第一个问题是phi角与DA角的大小关系(如下图所示)。
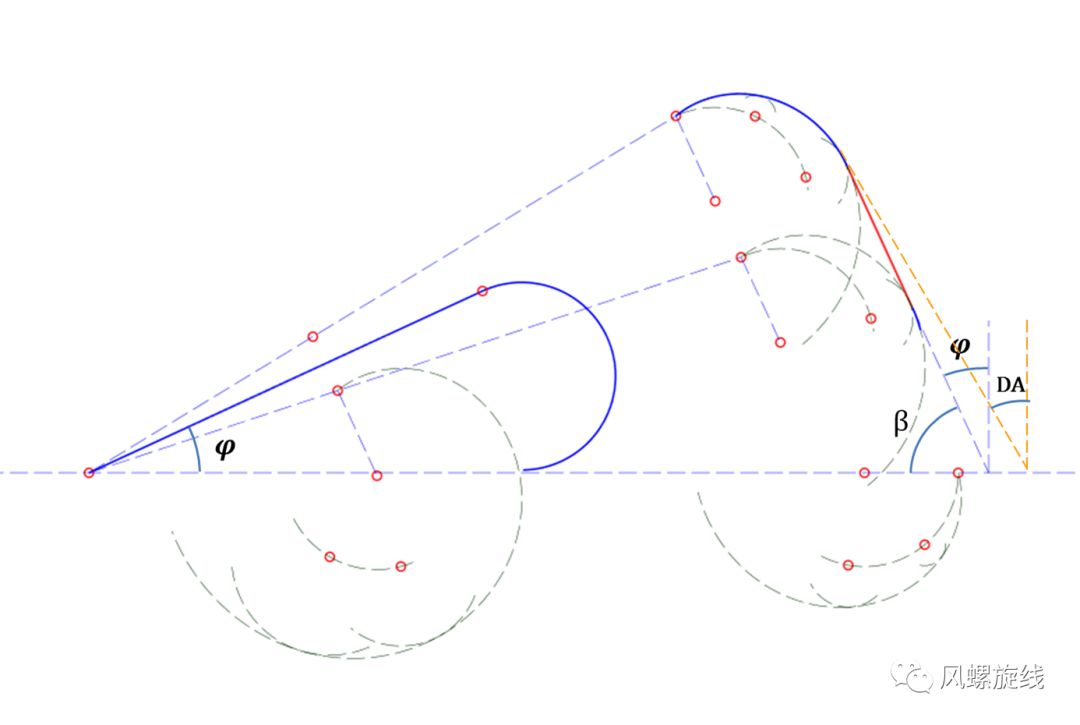
图3 基线转弯中phi角与DA角的大小关系
若将c2、c4风螺旋的公切线进行延长与基准轴线相交与一点,设延长线与基准线的夹角为β角,由于c2、c4风螺旋的初始参数相同,则可证明它们的公切线与出航航迹相垂直,即phi角与β角之和为90度。在公切线与基准线的交点画垂线,可知公切线与垂线的夹角等于phi角。
当DA角大于phi角时,如图3所示,DA角与基准线的交点位于公切线的右侧,转弯外边界与c2风螺旋相切,此时,c4风螺旋并不发挥作用(如图4中的位置关系)。
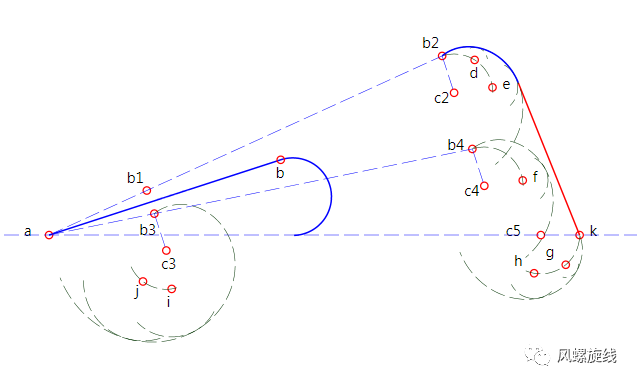
图4 DA角 大于phi角,切线与c2风螺旋相切
当DA角小于phi角时,DA角与基准线的交点位于公切线的左侧,转弯外边界与c4风螺旋相切,此时,风螺旋的公切线与c4风螺旋的切线共同发挥作用构成外边界(如图5所示)。
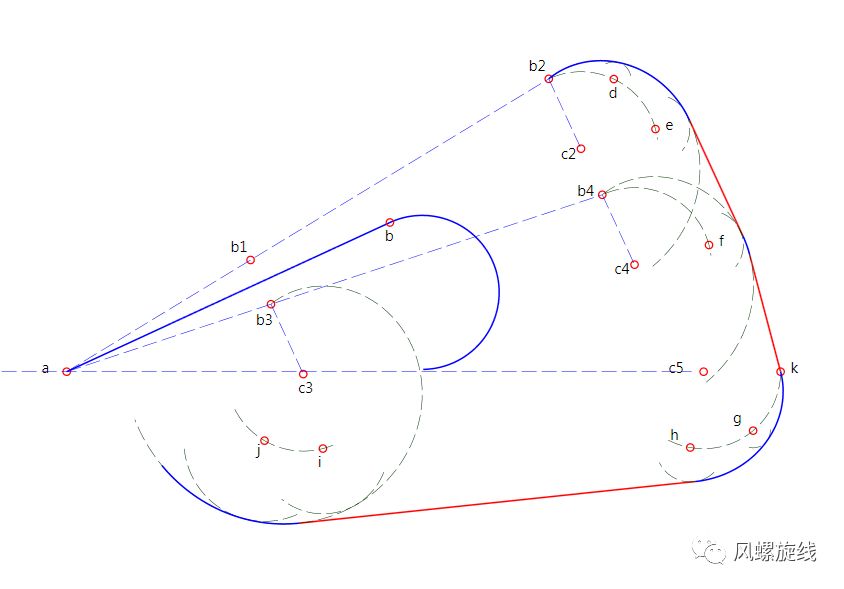
图5 DA角小于phi角,切线与c4风螺旋相切
用 sita 角度来描述上图5中的风螺旋时,c2风螺旋的起止角度为 0 度至 90+DA,c4风螺旋的起止角度为 90+DA 至 90+phi (此种情况下 DA<phi)。
c4风螺旋的终点角度计算过程为:
垂线向下的角度(90°)倒退DA角得到切线的角度;再倒退90度,增加DA角得到sita角度(值为零);再减去rotation(值为-90-phi)得到实际用于外扩计算的sita角度,公式为:(90-DA)-90+DA-(-90- phi) = 90+phi 。
当切线与c2风螺旋相切时,计算出的终点sita 角度同样为 90+phi。这里有一个非常有趣的结论:从c2(或c4)点画水平线,与转弯半径绘制的圆弧相交,从相交的圆弧点上按照(90+phi)*E 为半径画弧,该圆弧即是基线转弯保护区出航段最大外扩位置。当 DA>phi 时,切线与c2点绘制的圆弧相交,当 DA<phi 时,切线与c4点绘制的圆弧相交。因为,计算步骤中 (90-DA)-90+DA =0 表示sita 角是水平向右与零度轴相平行。这一结论可以用于检测基线转弯保护区出航段最远端位置是否准确。
c5风螺旋起点与前段平滑衔接,可以理解为,当从 c2 或 c4 风螺旋完成转弯后,未到达基准线之前是沿直线(垂直向下)飞行的,直线飞行时受侧风影响,外扩角度为DA角,因此,需要按照 DA 角从基准线反推出最外侧的边界。外扩的直线段飞行,已经考虑了风的影响,因此,c5风螺旋初始外扩距离为 0,并且与前航段的外边界是平滑相切的。
c5风螺旋与c3风螺旋公切线,按照风螺旋公切线的一般计算方法计算即可。
基线转弯进入段风螺旋如图6 所示:
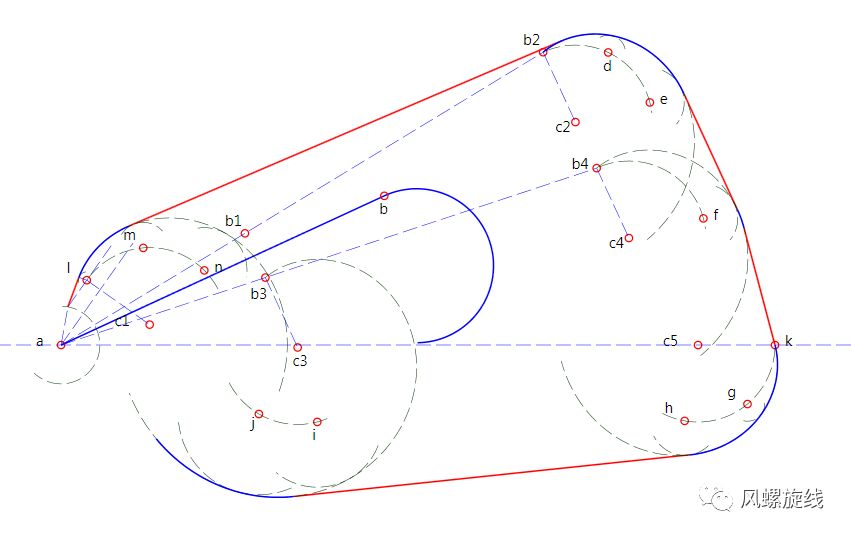
图6 基线转弯进入段保护区与风螺旋的关系
按照风螺旋的基础参数来分析,进入段首先是计算N3点的位置。在计算导航台顶空盲区时,出航外边界与标称航迹的夹角NDB为25°,VOR为15°。因此N3点的角度为 NDB:0-phi-30-25,V3点 VOR:0-phi-30-15 。N3(或V3) 找到后,沿0-phi-30方向移动 11*v 的距离得到 l 点,若将 从 l 点开始绘制的风螺旋称 c1 风螺旋,则它的初始外扩距离(offset)为 11*v(5秒的建立坡度时间 加上 6秒的反应时间),初始的旋转角度(rotation)为 0-phi-30-90。
c1 风螺旋初始参数确定以后,可以按照风螺旋公切线的一般算法计算与c2风螺旋的公切线,完整的切线关系如图6所示。
外扩4.6km的副区,对于风螺旋的计算来说,只需要使用相同的sita角度,并指定一个4.6km的offset即可实现,不再赘述。完成后的基线转弯保护区如下图所示:
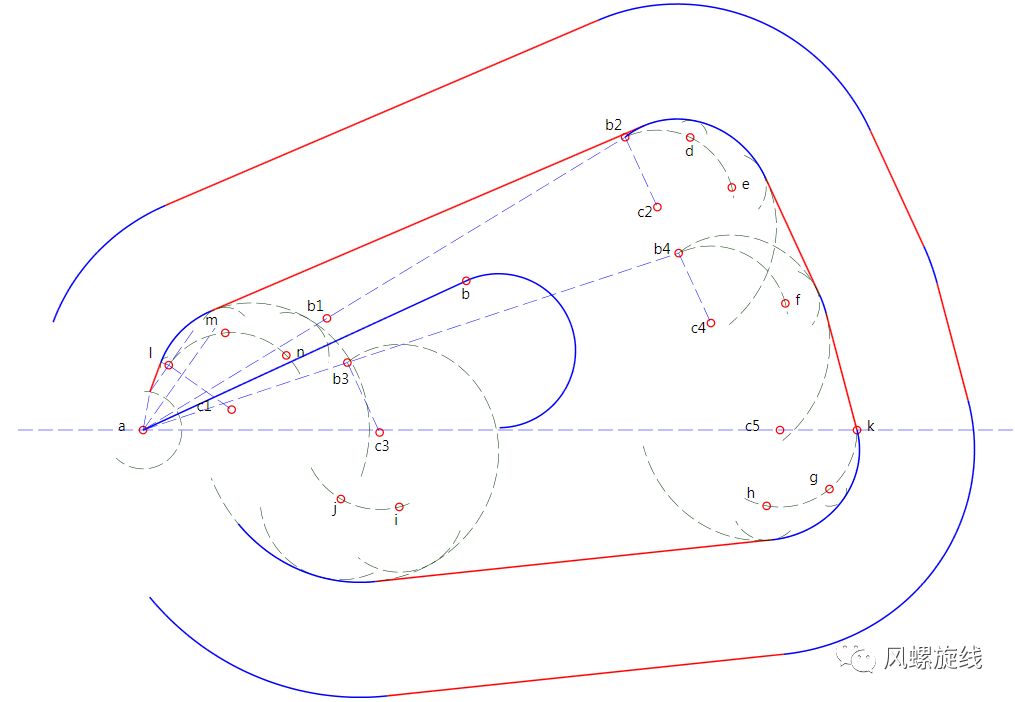
图7 IAS380,高度1850米,出航2分钟,NDB 基线转弯保护图
在速度表的注释中,反向程序最大260km/h,但在ICAO 9371模板中最大速度用到了465km/h,所以380km/h不算过分。
再上一张260km/h的图:
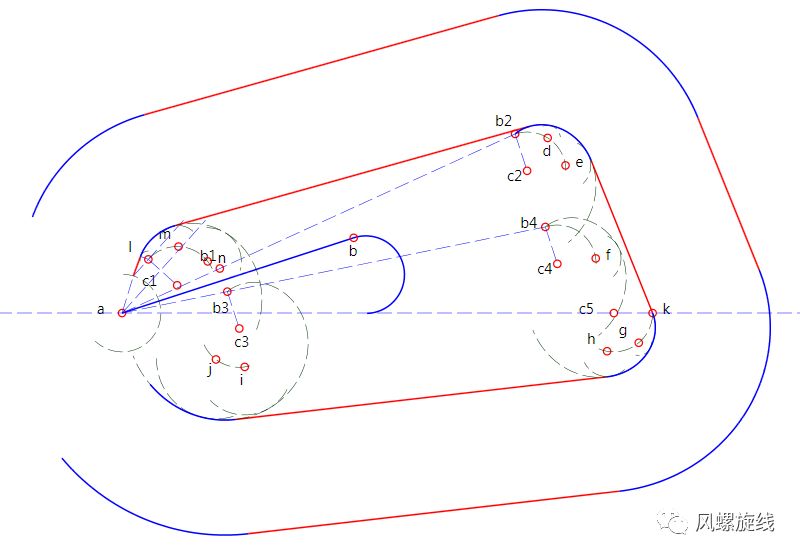
图8 IAS260,高度1850米,出航2分钟,NDB 基线转弯保护图
风螺旋算法在最大程序上采用了精确换算的计算方式,是未来程序模板自动化处理必备的基础理论。将飞行程序设计人员从繁重的保护绘制中解放出来,把更多的精力投入到方案设计中去,是未来自动化发展的必然趋势。做为飞行程序设计师,不必完全理解软件的运算过程,但必须能够发现软件计算中的错误。做为软件开发人员,风螺旋这一课一定是躲不掉了,哈哈哈。。。
本篇相关内容已发表于飞行学院学报2017年第一期,引用格式为:
[1] 刘崇军 等. 基线转弯模板的自动化算法分析[J]. 中国民航飞行学院学报, 2017, 28(1):33-37.
感谢飞行学院学报对风螺旋算法的大力支持,对个人而言很重要的另一篇文章《风螺旋精确算法在等待模板中的应用》将在2018年最近一期出版,欢迎大家及时订阅,错过学报的朋友,可以关注本公众号,我将继续为大家分享风螺旋算法在各类保护区中的应用。