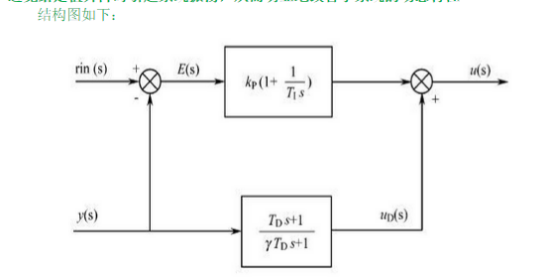
(1)微分先行PID控制算法
微分先行PID控制的特点是只对输出量yout(k)进行微分,而对给定值rin(k)不进行微分。这样,在改变给定值时,输出不会改变,而被控量的变化通常是比较缓和的。这种输出量先行微分控制适用于给定值rin(k)频繁升降的场合,可以避免给定值升降时引起系统振荡,从而明显地改善了系统的动态特性
(2)不完全微分PID控制算法
在PID控制中,微分信号的引入可改善系统的动态特性,但也易引进高频
干扰,在误差扰动突变时尤其显出微分项的不足。若在控制算法中加入低通滤波器,则可使系统性能得到改善
不完全微分PID的结构如下图。左图将低通滤波器直接加在微分环节上,右图是将低通滤波器加在整个PID控制器之后

(3)带死区的PID控制算法
在计算机控制系统中,某些系统为了避免控制作用过于频繁,消除由于频繁动作所引起的振荡,可采用带死区的PID控制算法,控制算式为:

式中,e(k)为位置跟踪偏差,e0是一个可调参数,其具体数值可根据实际控制对象由实验确定。若e0值太小,会使控制动作过于频繁,达不到稳定被控对象的目的;若e0太大,则系统将产生较大的滞后 控制算法流程:

注:<我们电子设计竞赛里,在简易倒立摆控制装置中就采用了带死区的PID控制算法,当时并不知道这个名称,这也就是在现场测试的时候为什么老师会问我们摆能够保持倒立静止不动,而不是靠左右抖动来控制平衡,就是因为我在里面设置了死区:好像是5度的角度>