本文主要部分全部来源于ROS官网的Tutorials.
Setup
roscore # making sure that we have roscore running
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key # Now you can use the arrow keys of the keyboard to drive the turtle around.
ROS Topics
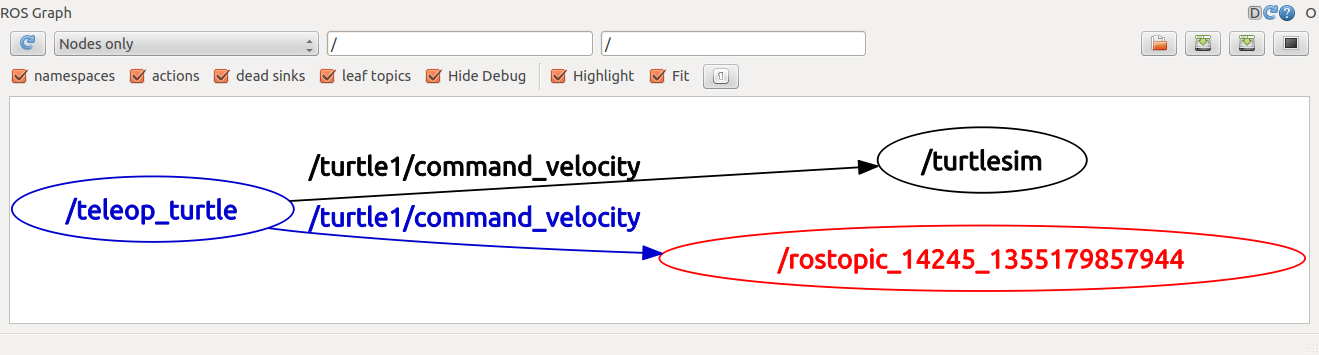
sudo apt-get install ros-kinetic-rqt sudo apt-get install ros-kinetic-rqt-common-plugins rosrun rqt_graph rqt_graph
rostopic -h rostopic echo /turtle1/cmd_vel # you will now see topic datas when you press the arrow key in turtle_teleop_key terminal
rostopic list -h # figure out what argument the list sub-command needs
rostopic list -v # displays a verbose list of topics to publish to and subscribe to and their type
rostopic type /turtle1/cmd_vel # You should get the message type of the topic: geometry_msgs/Twist
rosmsg show geometry_msgs/Twist # look at the details of the message using rosmsg
Using rostopic pub
# publishes data on to a topic, rostopic pub [topic] [msg_type] [args] rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]' # publishes the velocity commands at a rate of 1 Hz on the velocity topic rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]' # Now We can also look at what is happening in rqt_graph. # and see the data published by our turtlesim rostopic echo /turtle1/pose
# see how fast the turtlesim_node is publishing /turtle1/pose, $ rostopic hz [topic]
rostopic hz /turtle1/pose
# get in depth information about a topic
rostopic type /turtle1/cmd_vel | rosmsg show
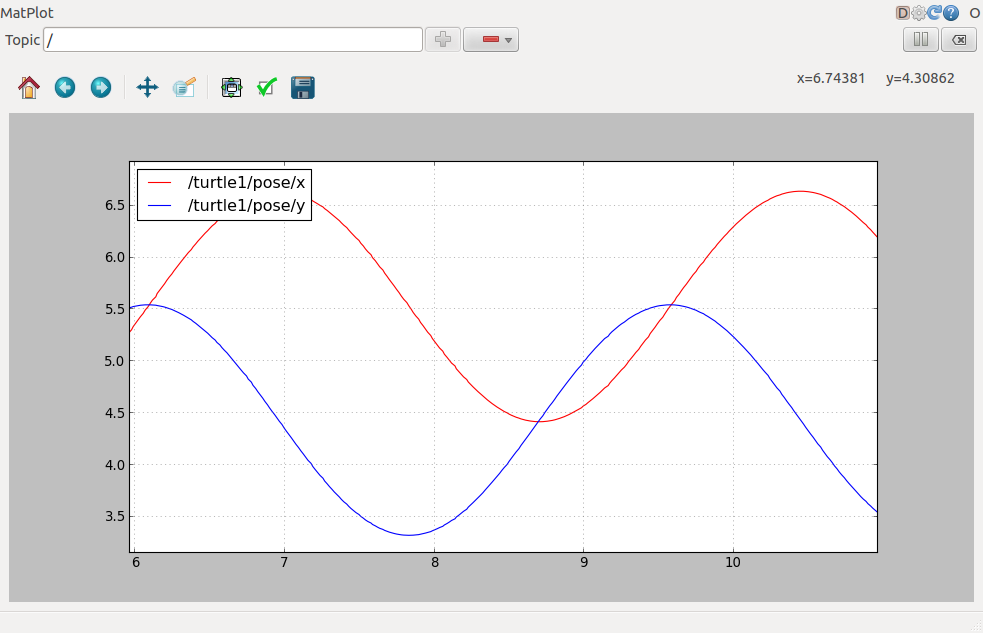
Using rqt_plot
rosrun rqt_plot rqt_plot # a text box in the upper left corner gives you the ability to add any topic to the plot. # Typing /turtle1/pose/x and add it. # Typing /turtle1/pose/y and add it.
ROS Services and Parameters
rosservice list # shows us that the turtlesim node provides nine services rosservice type /clear # find out what type the clear service is rosservice call /clear # clears the background of the turtlesim_node # look at the case where the service has arguments by looking at the information for the service spawn rosservice type /spawn | rossrv show rosservice call /spawn 2 2 0.2 "" # spawn a new turtle at a given location and orientation rosparam list # look at what parameters are currently on the param server rosparam set /background_r 150 # change the red channel of the background color rosservice call /clear # call the clear service for the parameter change to take effect rosparam get /background_g # get the value of the green background channel rosparam get / # show us the contents of the entire Parameter Serve rosparam dump params.yaml # write all the parameters to the file ./params.yaml (current directory) rosparam load params.yaml copy # load these yaml files into new namespaces rosparam get /copy/background_b
Using rqt_console and roslaunch
This tutorial introduces ROS using rqt_console and rqt_logger_level for debugging and roslaunch for starting many nodes at once.
sudo apt-get install ros-kinetic-rqt ros-kinetic-rqt-common-plugins ros-kinetic-turtlesim # in two new terminals start rqt_console and rqt_logger_level rosrun rqt_console rqt_console rosrun rqt_logger_level rqt_logger_level rosrun turtlesim turtlesim_node # Since the default logger level is INFO you will see any info that the turtlesim publishes when it starts up
roscd beginner_tutorials mkdir launch cd launch gedit turtlemimic.launch
<launch> <group ns="turtlesim1"> <node pkg="turtlesim" name="sim" type="turtlesim_node"/> </group> <group ns="turtlesim2"> <node pkg="turtlesim" name="sim" type="turtlesim_node"/> </group> <node pkg="turtlesim" name="mimic" type="mimic"> <remap from="input" to="turtlesim1/turtle1"/> <remap from="output" to="turtlesim2/turtle1"/> </node> </launch>
roslaunch beginner_tutorials turtlemimic.launch rostopic pub /turtlesim1/turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]' # the two turtlesims start moving even though the publish command is only being sent to turtlesim1
Using rosed to edit files in ROS
rosed roscpp Logger.msg # demonstrates how you would edit the Logger.msg file within the roscpp package rosed roscpp <tab><tab> # tab auto complete echo "export EDITOR='gedit -w'" >> ~/.bashrc source ~/.bashrc echo $EDITOR rosed roscpp Logger.msg # This time file will be open by The more beginner-friendly editor
Creating a ROS msg and srv
- msg: msg files are simple text files that describe the fields of a ROS message. They are used to generate source code for messages in different languages.
- srv: an srv file describes a service. It is composed of two parts: a request and a response.
Aboat Msg
$ roscd beginner_tutorials $ mkdir msg $ echo "int64 num" > msg/Num.msg rosed beginner_tutorials package.xml
Open package.xml, and make sure these two lines are in it.
<build_depend>message_generation</build_depend> <exec_depend>message_runtime</exec_depend>
rosed beginner_tutorials CMakeLists.txt
Modify it like this:
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
...
catkin_package(
...
CATKIN_DEPENDS message_runtime ...
...)
...
add_message_files(
FILES
Num.msg
)
...
generate_messages(
DEPENDENCIES
std_msgs
)
...
Make sure ROS can see it.
rosmsg show beginner_tutorials/Num # You will see: int64 num
rosmsg show Num # You will see: [beginner_tutorials/Num]: int64 num
Aboat srv
$ roscd beginner_tutorials $ mkdir srv $ roscp rospy_tutorials AddTwoInts.srv srv/AddTwoInts.srv
$ rosed beginner_tutorials CMakeLists.txt
Modify it like this:
...
add_service_files( FILES AddTwoInts.srv )
...
make sure that ROS can see it using the rossrv show command
rossrv show beginner_tutorials/AddTwoInts
rossrv show AddTwoInts
Now that we have made some new messages we need to make our package again:
$ roscd beginner_tutorials $ cd ../.. $ catkin_make install $ cd -
Any .msg file in the msg directory will generate code for use in all supported languages. The C++ message header file will be generated in ~/catkin_ws/devel/include/beginner_tutorials/.
rosmsg -h
Review
Let's just list some of the commands we've used so far:
- rospack = ros+pack(age) : provides information related to ROS packages
-
roscd = ros+cd : changes directory to a ROS package or stack
-
rosls = ros+ls : lists files in a ROS package
-
roscp = ros+cp : copies files from/to a ROS package
- rosmsg = ros+msg : provides information related to ROS message definitions
- rossrv = ros+srv : provides information related to ROS service definitions
- catkin_make : makes (compiles) a ROS package
- rosmake = ros+make : makes (compiles) a ROS package (if you're not using a catkin workspace)