Faster R-CNN
Towards Real-Time Object Detection with Region Proposal Networks
其中共享了卷积特征,以提高速度。
实现端到端的网络结构(RPN+RCNN)。

关键点定位
Convolutional Pose Machines
通过序列化网络(用级联小网络实现大网络的定位功能),逐步使定位更精确
优点:在同等甚至更高的准确率下,提高速度,
缺点:训练比较麻烦。
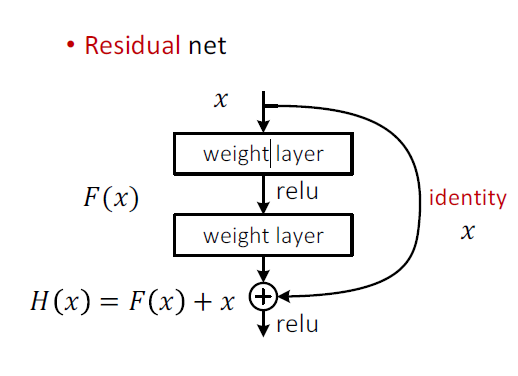
深度残差网络
优点:解决了梯度消失问题,增加网络层数,检测准确率不会降低。
缺点:训练较难
Style Transfer
效果如下图(论文中的图片)

利用CNN,保留物体信息。
级联网络Cascade
这是一种比较通用的思想。主要目的是:在不降低准确率的情况下,大大提高速度。
基本原理:用多个小网络,实现一个大网络的功能,如 关键点定位、实时人脸识别。
基本原理如下图,将前一级网络输出叠加到后一级网络输出,以避免梯度消失,也避免feature消失。
DeepFashion
公开了benchmark 服装数据库,包含大量标记,http://mmlab.ie.cuhk.edu.hk/projects/DeepFashion.html
论文中所用方法FashionNet:结合global+local信息,在多项指标上提高效果。