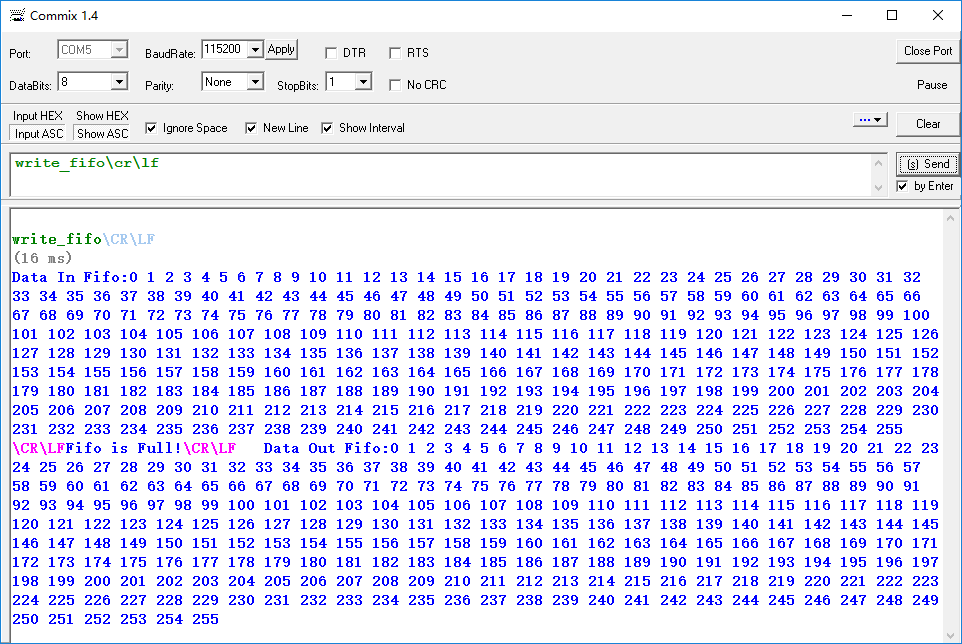
实验现象:
核心代码:
int main(void) { /* USER CODE BEGIN 1 */ int i; int fsmc_read_data; char error_flag = 0; char receive_data[50]; char buffer[15]; char *p; /* USER CODE END 1 */ /* MCU Configuration----------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_USART6_UART_Init(); MX_FMC_Init(); /* USER CODE BEGIN 2 */ usart6.initialize(115200); usart6.printf("Hello,I am iCore4! "); LED_GREEN_ON; /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ if(usart6.receive_ok_flag == 1){ usart6.receive_ok_flag = 0; memset(receive_data,0,sizeof(receive_data)); memset(buffer,0,sizeof(buffer)); for(i = 0;i < 30;i ++){ receive_data[i] = usart6.receive_buffer[i]; } p = receive_data; i = 0; while(*p != ' '){ //»ñÈ¡²Ù×÷ÃüÁî buffer[i++] = *p++; if(i > sizeof(buffer))i = 0; } for(i = 0;i < sizeof(buffer);i++){//½«ÃüÁîת»¯ÎªÐ¡Ð´×Ö·û buffer[i] = tolower(buffer[i]); } if(memcmp(buffer,"write_fifo",strlen("write_fifo")) == 0){//Ö´ÐÐдFifo error_flag = 0; usart6.printf("Data In Fifo:"); for(i = 0;;i++){ fpga_write(0,i); usart6.printf("%d ",i); if(FIFO_FULL){ fpga_write(0,i+1); usart6.printf("%d ",i+1); usart6.printf(" Fifo is Full! Data Out Fifo:"); for(i = 0;i < 256;i++){ //¿ªÊ¼¶ÁÈ¡256¸öÊý¾Ý fsmc_read_data = fpga_read(0); usart6.printf("%d ",fsmc_read_data); //¶ÁÈ¡Öµ·¢ËÍÖÁ´®¿Ú } break; } } }else{ error_flag = 1; } if(error_flag){ LED_RED_ON; LED_GREEN_OFF; usart6.printf("Bad Command! "); }else{ LED_RED_OFF; LED_GREEN_ON; } } } /* USER CODE END 3 */ }
module fifo_wr_rd( input clk_25m, input rst_n, input wrn, input rdn, input cs0, input nadv, input [22:16]ab, inout [15:0]db, output fifo_full_flag, output led_red, output led_green, output led_blue ); pll u1( .inclk0(clk_25m), .c0(clk_150m) ); wire [15:0]data_out; my_fifo u2( .data(data_in), .wrreq(1'd1), .wrclk(wr2), .rdreq(1'd1), .rdclk(!rd), .wrfull(fifo_full_flag), .q(data_out) ); reg [15:0]data_in; always@(posedge wrn or negedge rst_n) if(!rst_n) data_in <= 16'd0; else data_in <= db; reg wr1,wr2; always@(posedge clk_150m or negedge rst_n) if(!rst_n) begin wr1 <= 1'd0; wr2 <= 1'd0; end else {wr2,wr1} <= {wr1,wr}; wire rd = rdn | cs0; wire wr = wrn | cs0; assign db = rd ? 16'hzzzz : data_out; assign led_red = 1'd1; assign led_green = 1'd0; assign led_blue = 1'd1; endmodule
源代码下载链接:
链接:http://pan.baidu.com/s/1jHFNhwq 密码:qktz
iCore4链接:
