总的来说这个驱动和之前的没有太大差别,只是熟悉并复习一下之前的知识,比如裸机的按键查询和前面的first_drv的构建过程:
Linux操作系统和驱动程序运行在内核空间,应用程序运行在用户空间,两者不能简单地使用指针传递数据,
因为Linux使用的虚拟内存机制
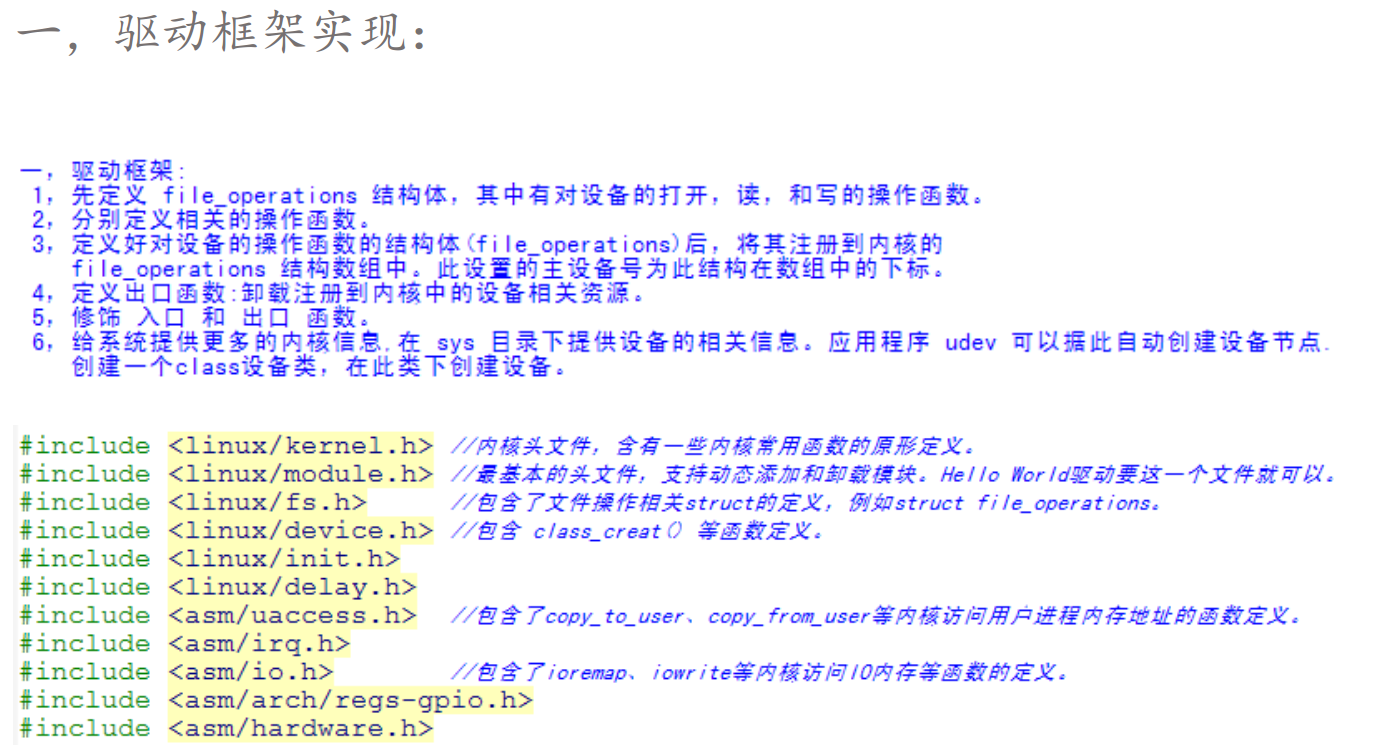
Code(可看备注回忆知识点):
#include <linux/module.h> #include <linux/kernel.h> #include <linux/fs.h> #include <linux/init.h> #include <linux/delay.h> #include <asm/uaccess.h> #include <asm/irq.h> #include <asm/io.h> #include <asm/arch/regs-gpio.h> #include <asm/hardware.h> #include <linux/device.h> static struct class *seconddrv_class; static struct class_device *seconddrv_class_dev; volatile unsigned long *gpfcon; volatile unsigned long *gpfdat; volatile unsigned long *gpgcon; volatile unsigned long *gpgdat; static int second_drv_open(struct inode *inode, struct file *file) { /* 配置GPF0,2为输入引脚 */ *gpfcon &= ~((0x3<<(0*2)) | (0x3<<(2*2))); /* 配置GPG3,11为输入引脚 */ *gpgcon &= ~((0x3<<(3*2)) | (0x3<<(11*2))); return 0; } ssize_t second_drv_read(struct file *file, char __user *buf, size_t size, loff_t *ppos) { /* 返回4个引脚的电平 */ unsigned char key_vals[4]; int regval; if (size != sizeof(key_vals)) return -EINVAL;//宏定义为22,代表的是invalid argument /* 读GPF0,2 */ regval = *gpfdat; key_vals[0] = (regval & (1<<0)) ? 1 : 0;//只想有1或者0两种状态值而采取的方法 key_vals[1] = (regval & (1<<2)) ? 1 : 0; /* 读GPG3,11 */ regval = *gpgdat; key_vals[2] = (regval & (1<<3)) ? 1 : 0; key_vals[3] = (regval & (1<<11)) ? 1 : 0; //copy_to_user(buf, key_vals, sizeof(key_vals));//从内核空间拷贝数据到用户空间 if(copy_to_user(buf, key_vals, sizeof(key_vals))) { return -EFAULT;//表示 bad address } return sizeof(key_vals); } static struct file_operations sencod_drv_fops = { .owner = THIS_MODULE, /* 这是一个宏,推向编译模块时自动创建的__this_module变量 */ .open = second_drv_open, .read = second_drv_read, }; int major; static int second_drv_init(void) { major = register_chrdev(0, "second_drv", &sencod_drv_fops);//注册驱动 seconddrv_class = class_create(THIS_MODULE, "second_drv");//创建类 seconddrv_class_dev = class_device_create(seconddrv_class, NULL, MKDEV(major, 10), NULL, "buttons"); //创建设备/* /dev/buttons 主设备号系统自动分配,次设备号为10 */ gpfcon = (volatile unsigned long *)ioremap(0x56000050, 16);//物理地址重映射为虚拟地址 gpfdat = gpfcon + 1;//指针+1,这里后移4byte gpgcon = (volatile unsigned long *)ioremap(0x56000060, 16); gpgdat = gpgcon + 1; return 0; } static void second_drv_exit(void) { unregister_chrdev(major, "second_drv");//卸载驱动 class_device_unregister(seconddrv_class_dev);//取消设备注册 class_destroy(seconddrv_class);//清除类 iounmap(gpfcon);//取消IO重映射 iounmap(gpgcon); } module_init(second_drv_init);//驱动入口函数的修饰函数,该函数在do_initcalls()中被调用 module_exit(second_drv_exit); MODULE_LICENSE("GPL");
刚开始编译会有警告,说没有检查copy_to_user的返回值,这个函数如果成功返回的是0,失败返回有多少个Bytes未完成copy。所以做了如上更改。
Makefile:
KERN_DIR =/home/book/Documents/linux-2.6.22.6 PWD := $(shell pwd) all: make -C $(KERN_DIR) M=$(PWD) modules clean: make -C $(KERN_DIR) M=$(PWD) modules clean rm -rf modules.order obj-m += second_drv.o
测试程序:
#include <sys/types.h> #include <sys/stat.h> #include <fcntl.h> #include <stdio.h> int main(int argc, char **argv) { int fd; unsigned char key_vals[4]; int count = 0; fd=open("/dev/buttons",O_RDWR); if(fd<0) { printf("can't open! "); } while (1) { read(fd, key_vals, sizeof(key_vals)); if (!key_vals[0] || !key_vals[1] || !key_vals[2] || !key_vals[3]) { printf("%04d key pressed: %d %d %d %d ", count++, key_vals[0], key_vals[1], key_vals[2], key_vals[3]); } } return 0; }
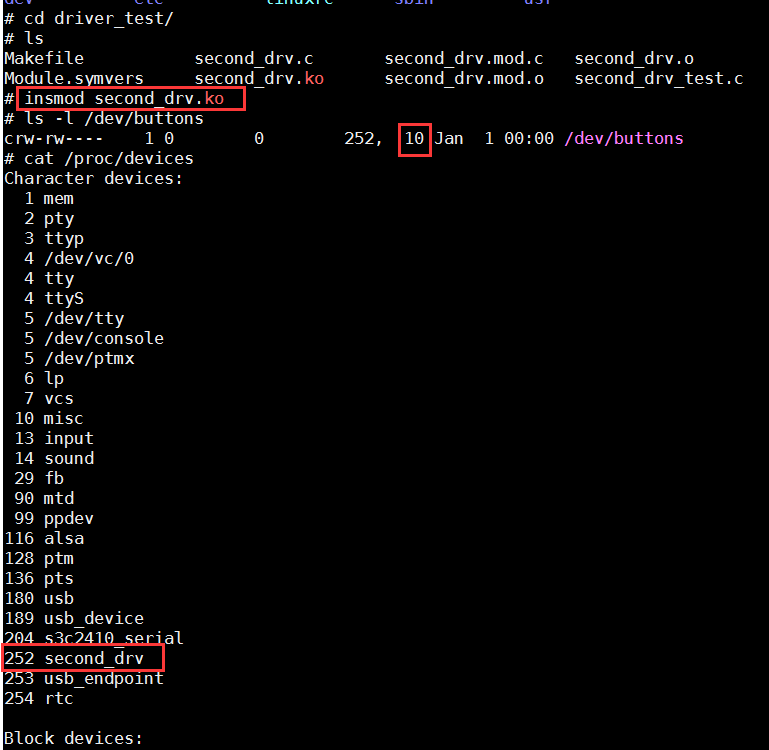
加载驱动,查看系统自动分配的主设备号和我们手动创建的次设备号10.
运行应用测试程序:

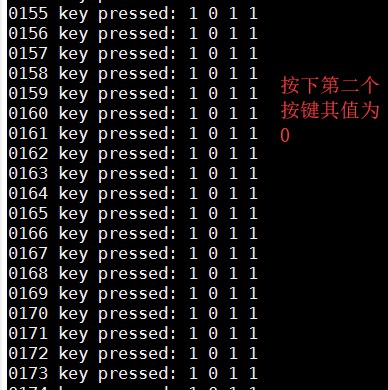

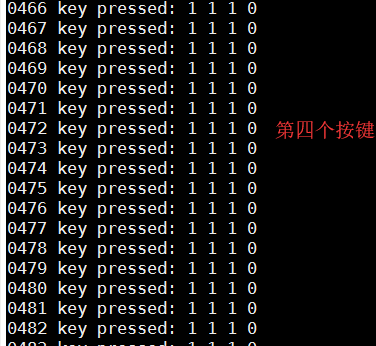
可见,我们的轮询按键的驱动函数正常工作了,此时在fs上输入top指令,查看cpu占有情况:

由此可以看出,应用程序second_test几乎霸占所有cpu资源,所有查询方式太消耗cpu,一般不使用。
原理图:

以下转载于:http://blog.163.com/xinbuqianjin@126/blog/static/167563447201010221231507/
|
|