为了使设备支持异步通知机制,驱动程序中涉及以下 3 项工作:
1. 支持 F_SETOWN 命令,能在这个控制命令处理中设置 filp->f_owner 为对应进程 ID。
不过此项工作已由内核完成,设备驱动无须处理。
2. 支持 F_SETFL 命令的处理,每当 FASYNC 标志改变时,驱动程序中的 fasync()函数将得以
执行。
驱动中应该实现 fasync()函数。
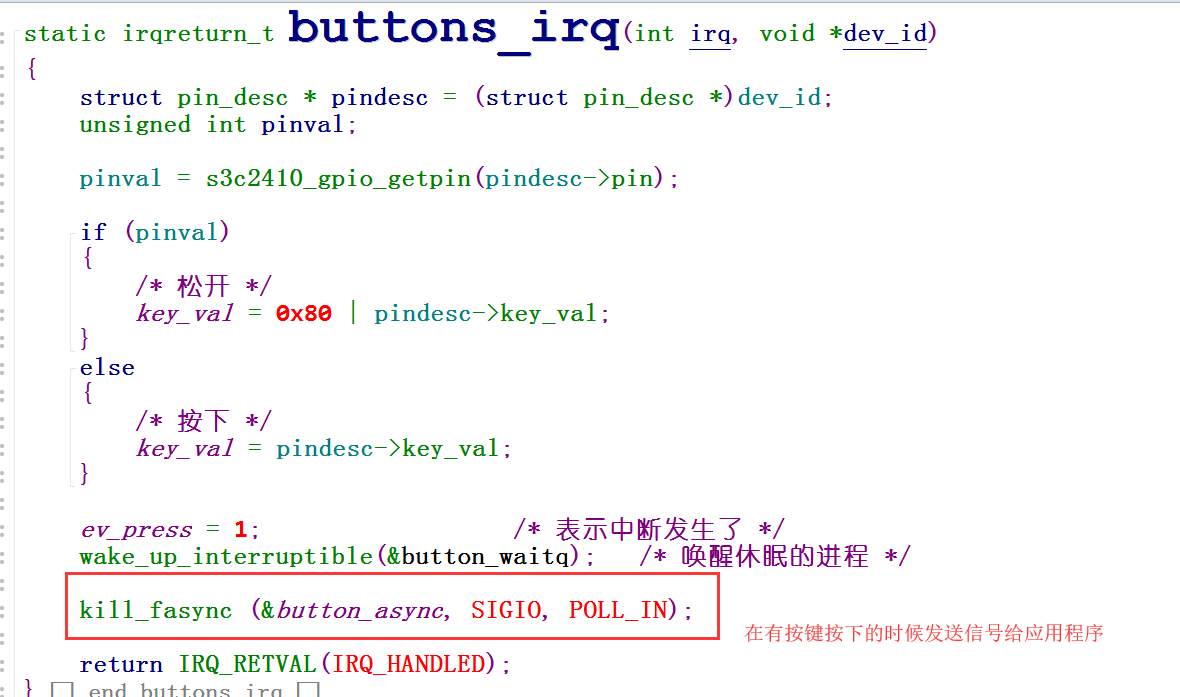
3. 在设备资源可获得时,调用 kill_fasync()函数激发相应的信号
应用程序:
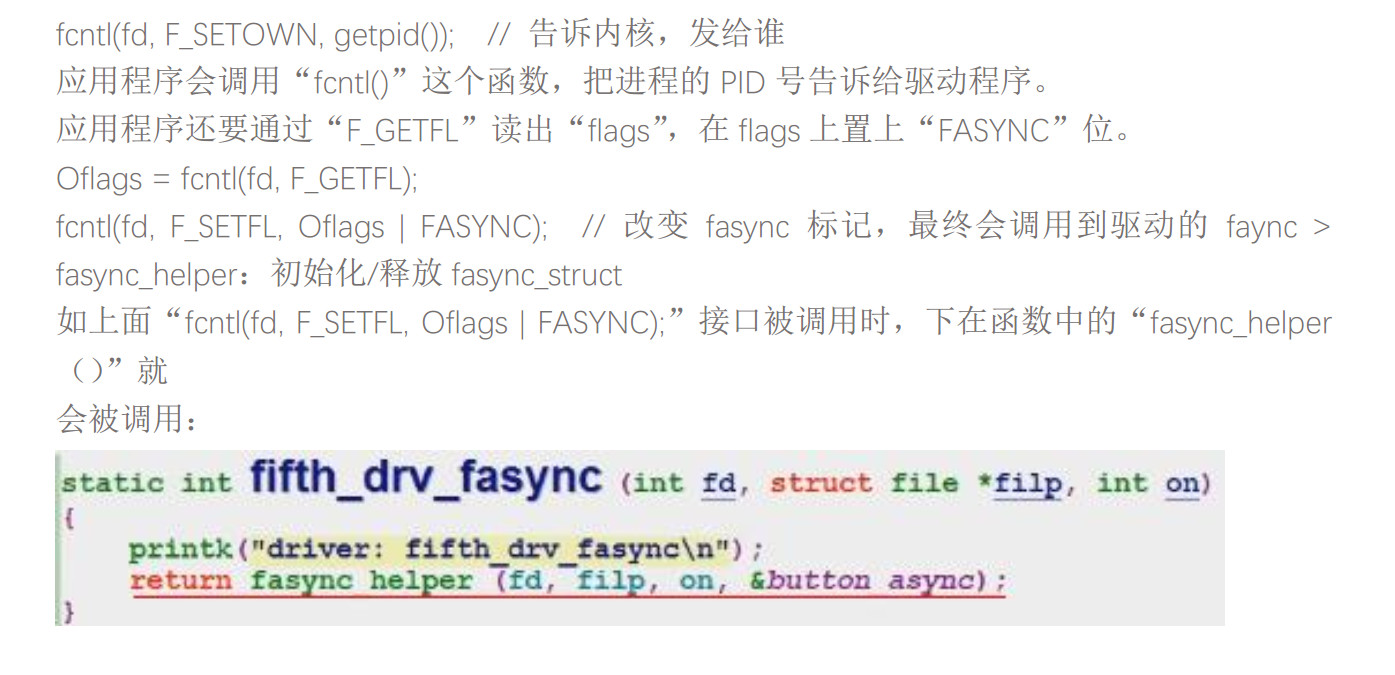
fcntl(fd, F_SETOWN, getpid()); // 告诉内核,发给谁
应用程序会调用“fcntl()”这个函数,把进程的 PID 号告诉给驱动程序。
应用程序还要通过“F_GETFL”读出“flags”,在 flags 上置上“FASYNC”位。
Oflags = fcntl(fd, F_GETFL);
fcntl(fd, F_SETFL, Oflags | FASYNC); // 改变 fasync 标记, 最终会调用到驱动的 faync >
fasync_helper:初始化/释放 fasync_struct
字符驱动之前的方式:
一,应用程序主动的去查询或 read。
1.查询方式:很占资源。
2.中断机制:虽然有休眠,但在没有按键按下时 read()会一直等待,永远不会返回。
3.poll 机制:指定超时时间。
以上都是“应用程序”主动去读或查询。
今天学习的方式:
二,异步通知:
有按键按下了,驱动程序来提醒(触发)“应用程序”去读键值。用“signal”
进程之间发信号:
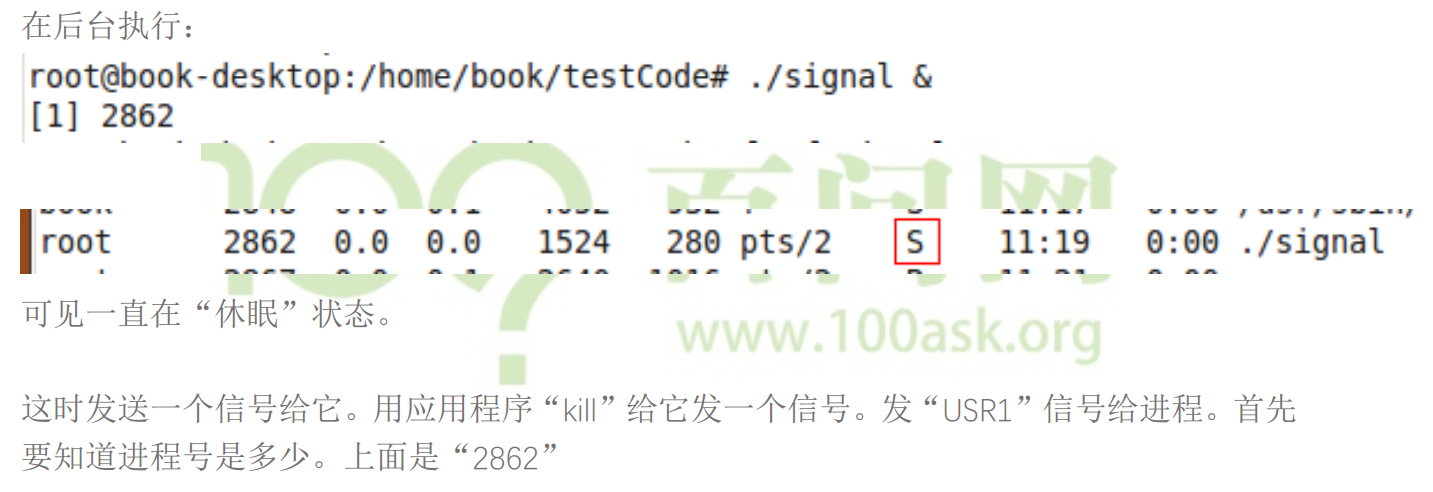
kill -9 pid
kill 是信号发送者,
pid 具体进程是信号接收者。
信号值是“9”
“信号”与“中断”差不多。注册中断处理函数时是用“request_irq(中断号,处理函数)”。
信号也是有一个“信号”和“处理函数”。
参数是“信号的值”,和要挂接的“信号处理函数”。
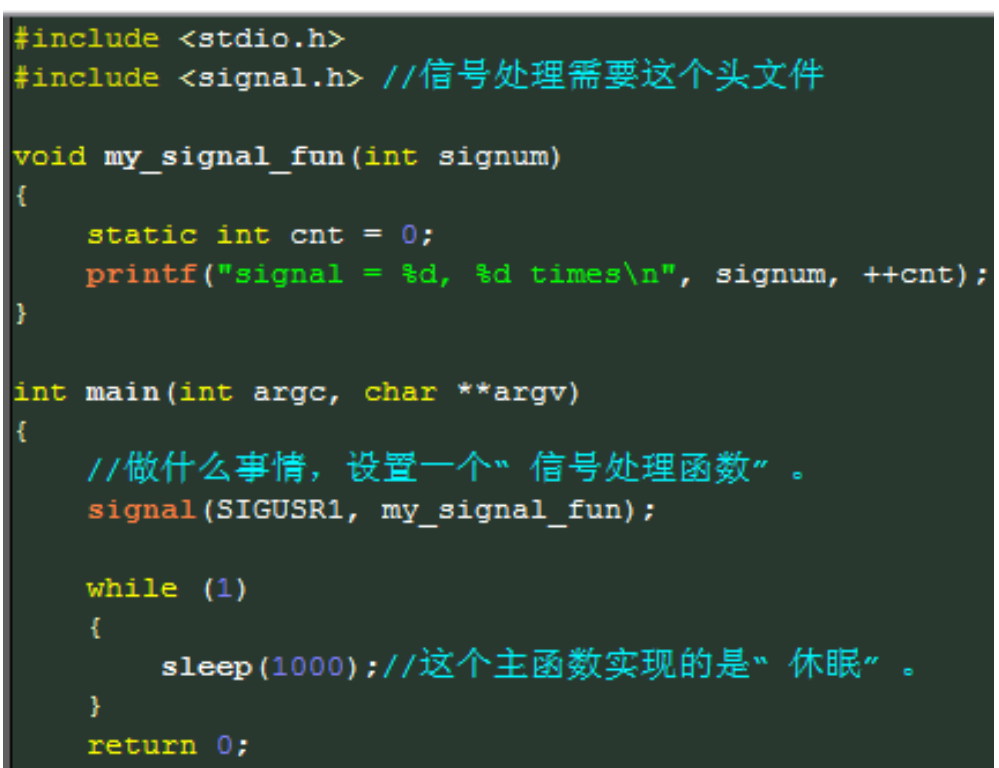
测试信号应用程序:
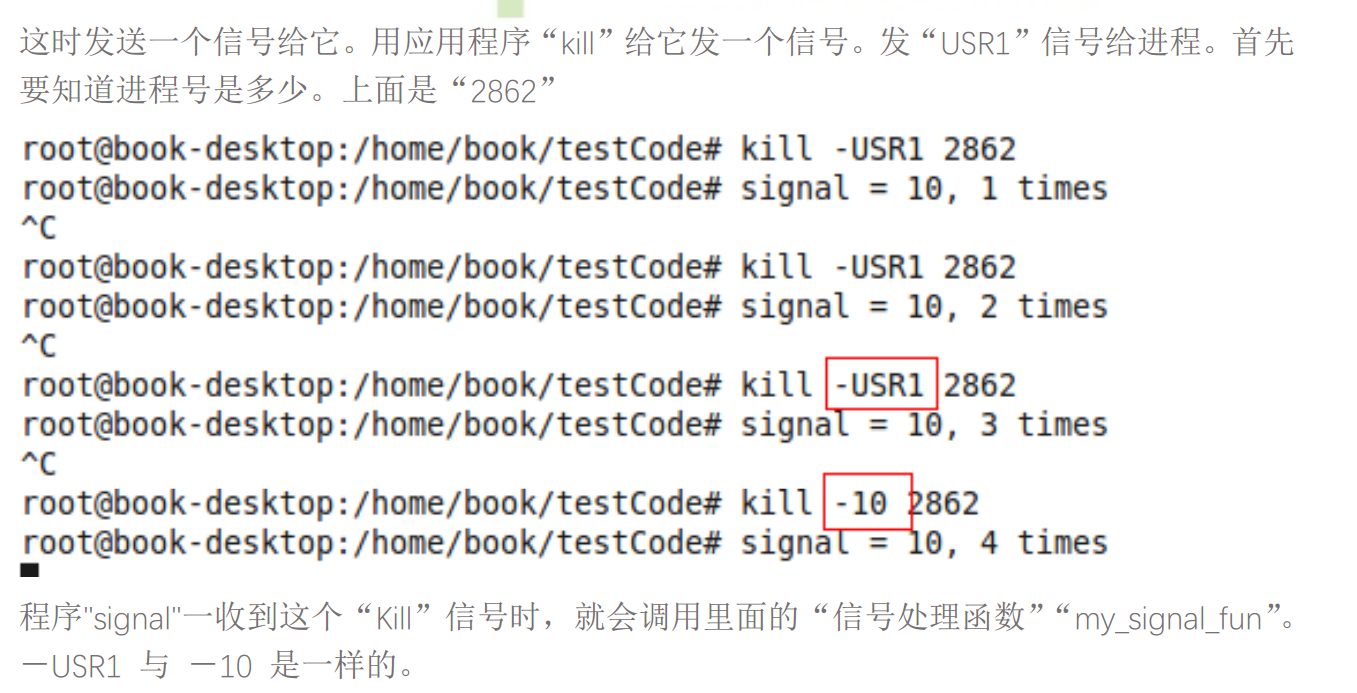
kill -9 pid: 9 这个信号处理函数就是让这个进程退出来。
1,先注册“信号处理函数”。
2,发送信号。
①,谁来发信号。
②,发给谁。
③,怎么发
三,异步通知功能的驱动函数的应用程序:
目标:按下按键时,驱动程序通知应用程序。(以前是应用程序主动读取按键值)
1,应用程序中要注册“信号处理函数”。因为通知它做什么事情,这要一个函数来做。
2,谁发:是驱动程序发送信号。
3,发给谁:信号发送给应用程序。应用程序要告诉驱动程序它自已的 PID,
4,如何发:驱动程序中调用某个函数(kill_fasync())
操作总结:
我们通过内核发送信号给应用程序,让应用程序在有按键按下的时候执行回调函数去读取按键值。
首先增加文件操作的结构体成员:
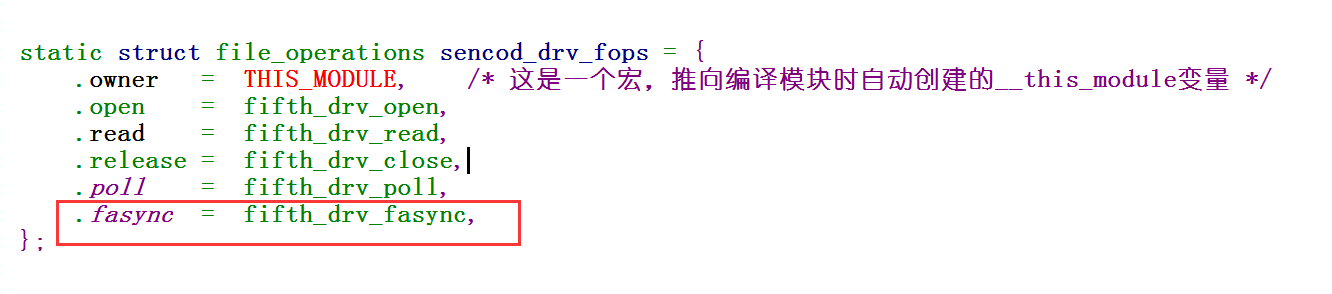
这个函数指针原型:


#include <sys/types.h> #include <sys/stat.h> #include <fcntl.h> #include <stdio.h> #include <poll.h> #include <signal.h> #include <sys/types.h> #include <unistd.h> #include <fcntl.h> /* fifthdrvtest */ int fd; void my_signal_fun(int signum) { unsigned char key_val; read(fd, &key_val, 1);//执行了这个read的前提是有按键按下了 printf("key_val: 0x%x ", key_val); } int main(int argc, char **argv) { unsigned char key_val; int ret; int Oflags; signal(SIGIO, my_signal_fun); fd = open("/dev/buttons", O_RDWR); if (fd < 0) { printf("can't open! "); } fcntl(fd, F_SETOWN, getpid());//告诉内核信号发送给谁?通过PID编号体现 Oflags = fcntl(fd, F_GETFL); //应用程序读出标志位Oflags fcntl(fd, F_SETFL, Oflags | FASYNC);//并把标志位加上异步信息,应用程序调用该函数会触发驱动层去调用我们编写的fifth_drv_fasync函数 while (1) { sleep(1000); } return 0; }