上一篇的末尾讲到了表现性的问题,贝叶斯网络不能完全表现出某些概率分布特征,而马尔科夫网络有更好的表现性,马尔科夫网络是无向图模型(UGM)。
一、Factors(因子)
每个因子可以是一个函数,也可以是一个表,表示其中的variables之间的关系。表示为Φ(X1,X2,...,Xk)。
factor的范围scope = {X1,X2,...,Xk},之前的概率分布P(A,B,C)均是factor。
每个factor中包含了很多variables,每个variables也可能有很多的取值,对应关系为:factor——>variables——>values。
二、配对马尔科夫网络(Pairwise Markov Network)
是一个有节点X1 , ... , Xn,和边 Xi - Xj 的无向图,和factor Φij(Xi,Xj) 相关联,每个factor只表达两个节点的对应关系。
对于MNs中的factor的理解,下面的例子:
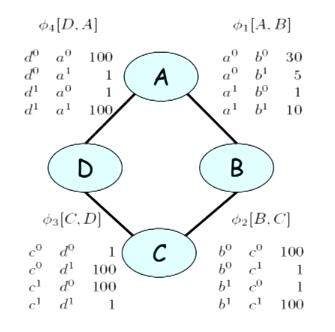
图1(取自coursera PGM公开课)
其中A,B,C,D是四位同学,图表示的是他们之间互相学习的关系,相互连线表示两个人能共同学习,而factor Φi 表示他们之间的学习效率,每个factor中的variable都有两个取值——0和1,表示的是学习的方式。以C,D为例,两个人在variable的取值相同的情况下, Φ3[C,D]的值都是1,说明两个人在学习方法相同的情况下学习效率比较低;而在variable取值不同的情况下,Φ3[C,D]的值都是100,说明两个人在学习方法不一样的情况下,学习的效率比较高。整个的分布情况也可以表示成如下:
![]()
二、一般吉布斯分布(General Gibbs Distribution)
现在假设一个全链接的成对马尔可夫网络,有 X1,...,Xn 个variables,每一个variable中有 d 个values,那么所有的组合一共有多少种情况,最终会得到多少参数(每一种情况的结果)?
先来看对于 X 之间的链接一共会有多少种情况,每个 X 都可能会和其他 n-1 个进行链接,也就是说数量级是 O(n2),每两个 X 之间的values可能的组合是 O(d2),那么整个情况的数量级便是 O(n2d2)。
再来考虑条件概率分布的情况,单说贝叶斯网络的情况,贝叶斯网络中的组合情况在上一篇博客中提到,最终的组合数量级是 O(dn)>> O(n2d2),由此可见,配对马尔科夫网络所表现出来的图中变量的分布情况并不是很全面,最好是在马尔科夫网络中加入条件概率来增加网络的表现度,首先第一步要做的便是将马尔科夫网络中的分布转换成概率分布,于是便有了一般吉布斯分布。
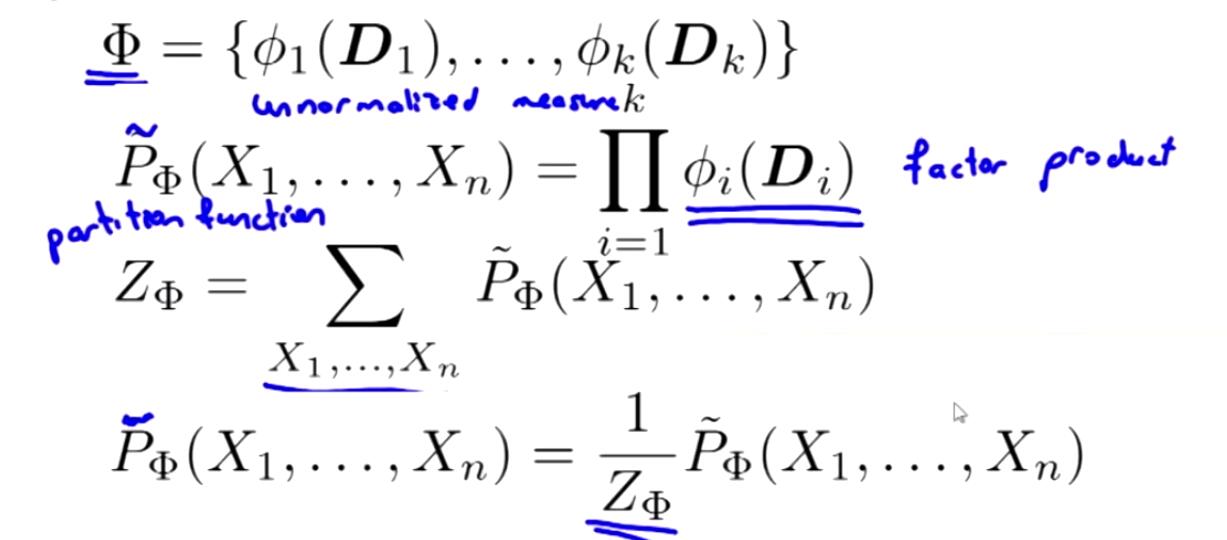
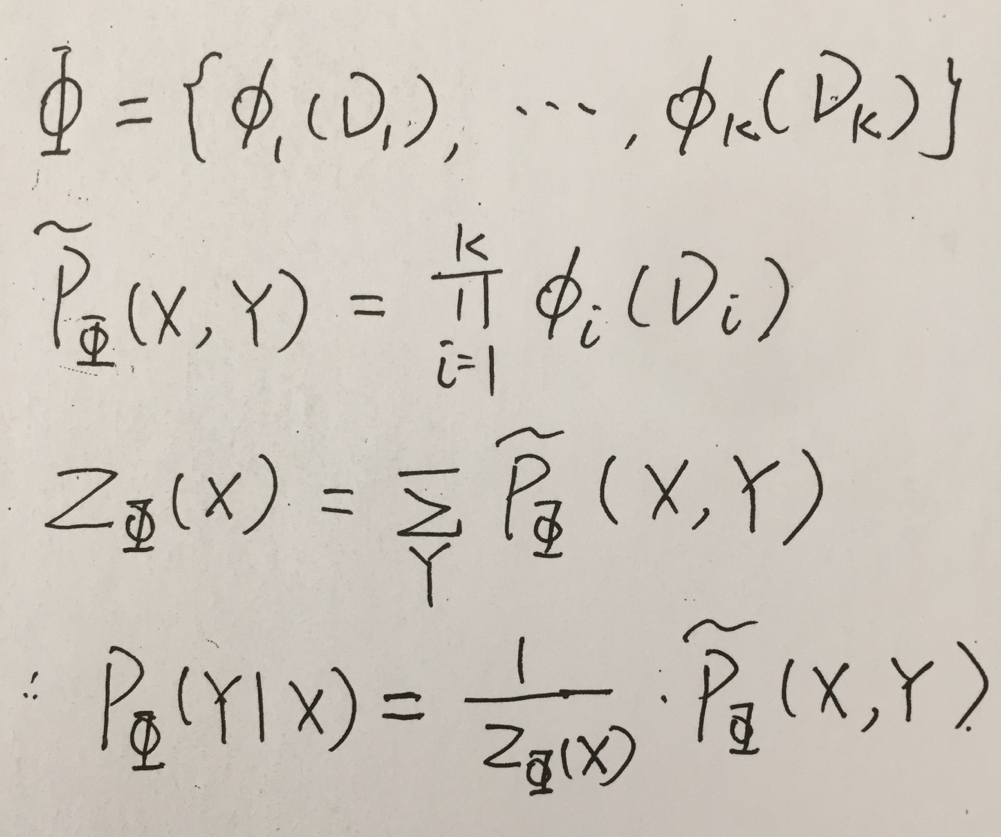
吉布斯分布:对于如下的一个factor,是一个k个factor的集合,Φ 是一个马尔科夫网络
![]()
那么该网络中的分布可以表示为:
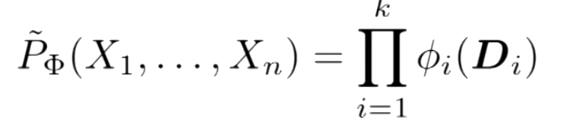
在P的上面加上的波浪号,表示该分布不是概率分布模型,从上面的例子中可以看出,还并不是一个概率分布。要将其变成概率分布,则需要对所有的 Φi(Di)进行求和,每一个 Φi(Di)所占总数的多少,用其和所得求和相除即可,这边是标准化操作。
三、条件随机场(Conditional Random Field)
之前的马尔科夫网络都是 X 之间的成对对应关系,但是对于一些实际应用中,例如图像识别中,通过一小块区域中的像素分布,推测出该小块区域是什么图形(草地、山等),可以建立如下的概率图:
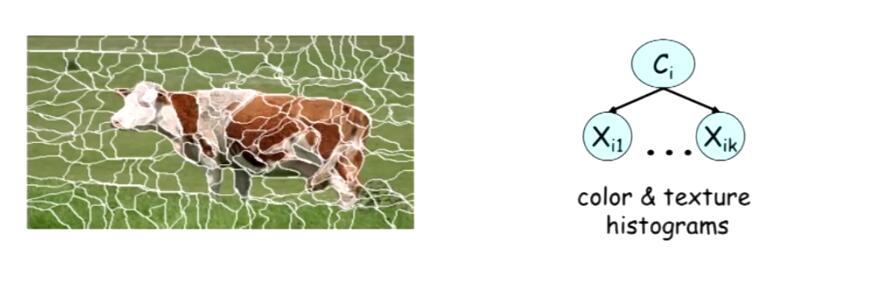
图2
Ci 表示的是左图中的一小块区域的标签,如草地、牛等等,其中的 Xi1...Xik 则表示的是该区域内的颜色分布,实际情况中得到的是 Xi1...Xik ,要根据这些来判断出该块区域的 Ci ,那么需要用到条件概率来进行判断(对于为什么对于该问题用条件随机场要优于贝叶斯概率图模型,教程中的解释没有完全读懂,这里先留下一个坑,结合后面的知识回来再填这个坑),在之前的马尔可夫网络加上条件概率分布。
整个推导的过程如下,比较好理解,求出 X 的边缘分布,并用 X,Y 的联合分布来除以 X 的边缘分布,得到的表示标准化之后的 Y基于X的条件概率分布。
对于sigmoid函数,其实也是可以由条件随机场推导出来的,具体的推导过程如下:
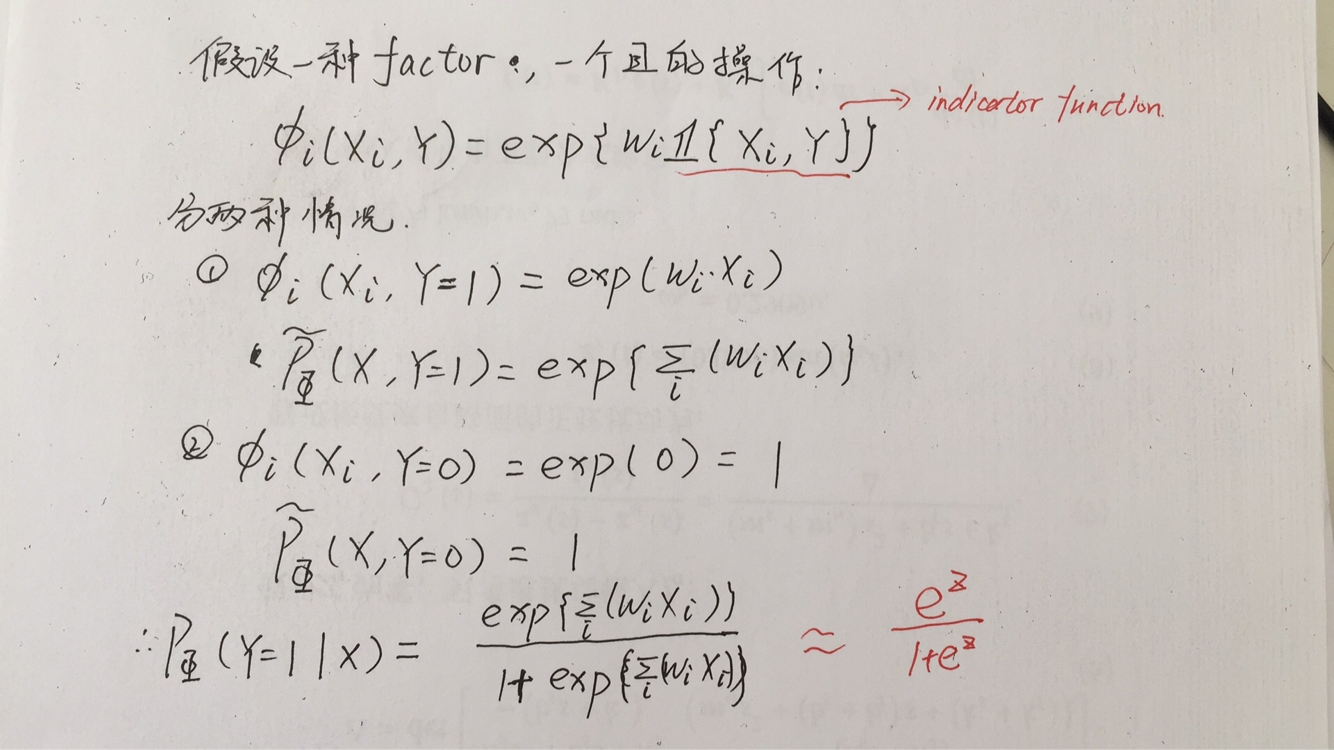
对于indicator function的解释详见视频:https://www.youtube.com/watch?v=V3pnr5gmJC8&t=328s
三、马尔科夫网络的独立性
如果网络 H 中的两个节点 X , Y 之间的任意一条路径,都不是通路(期间有节点已知),那么 X , Y 之间相互独立。
1、I-maps
马尔科夫网络中的i-map和贝叶斯网络中的定义相似
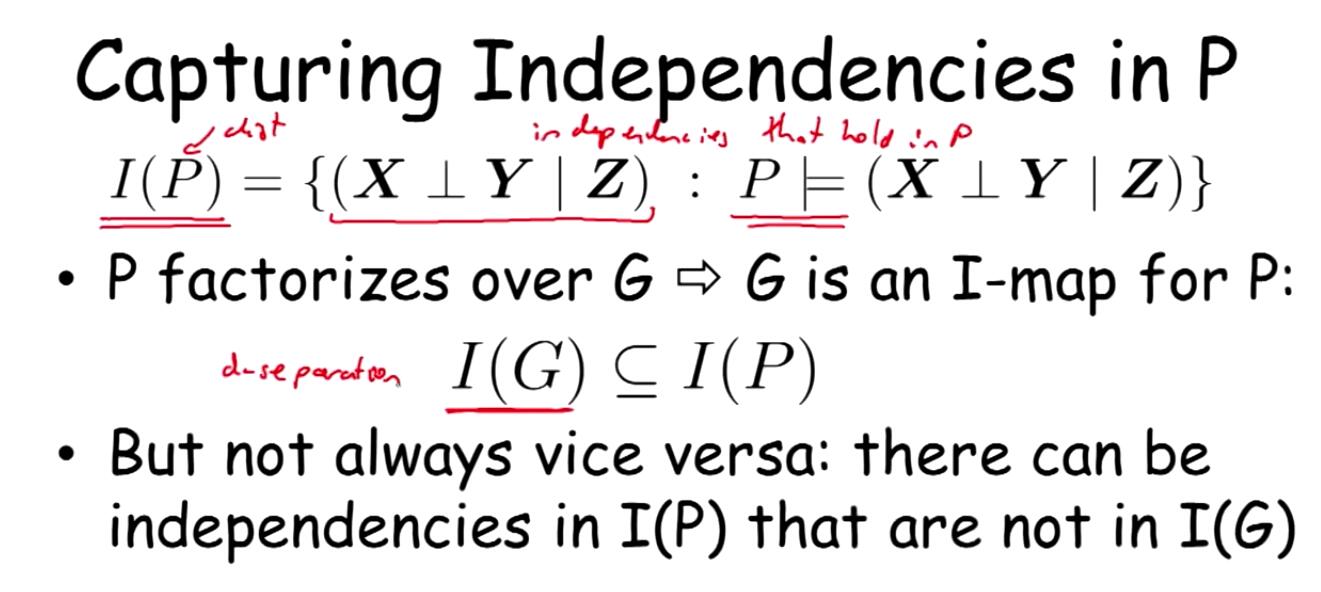
如果图G中的所有独立分布,能与P中的分布对应,那么图G就是分布P的i-map,图G中表示出的独立分布是P中独立分布的子集。图中的独立分布越多,表示这个图越稀疏,也能更好的表示出分布P中的结构,对于一个稀疏的图,有以下几点好处:
——有更少的参数,对于一个模型,要有适当的参数,即能够很好的表示出分布P,又能减少参数的计算量。
——有更多的独立分布信息,使图中分布与分布P尽可能一致。
1、perfect maps
当 I(P) = I(G) 时,G 叫做 P 的perfect map,但是存在以下几个问题
——perfect map可能不存在
——I-equivalence,一个 P 可能有很多个perfect map,每个perfect map的依赖关系还不同
perfect map不存在:
对于下图的情况,假设x1和x2的取值区间为{0,1},并且概率都是0.5,做异或的操作,最终的结果分布如右边所示,由概率图中可知在给定 y 的前提下,x1 x2相互独立,但是在右边的分布中可以看出x1,x2,y三者两两独立,在这种情况之下,是不存在perfect map的。

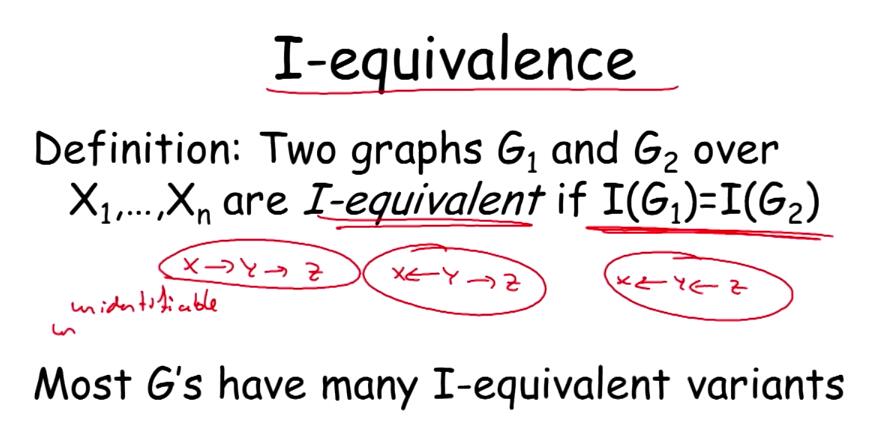
I-equivalence:
对于两个graph G1和G2,如果I(G1)= I(G2),那么这两个图是I-equivalence,正如图中所举出的例子一样,x->y->z和x<-y->z , x<-y<-z在y已知的情况,x和z均是独立的,他们的分布是相同的,那么对于这种情况,如果不事先说明y是x的祖先等条件,是不能得出该分布是对应于哪一个概率图的。