霍夫直线变换介绍
Hough Line Transform用来做直线检测
前提条件 – 边缘检测已经完成
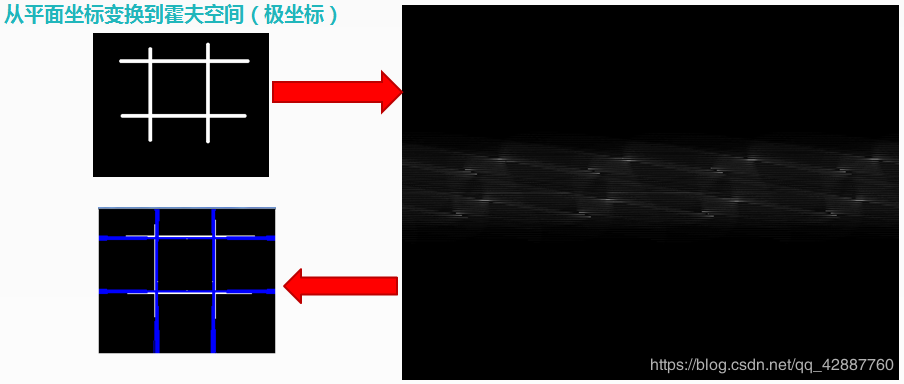
平面空间到极坐标空间转换
霍夫线变换的原理
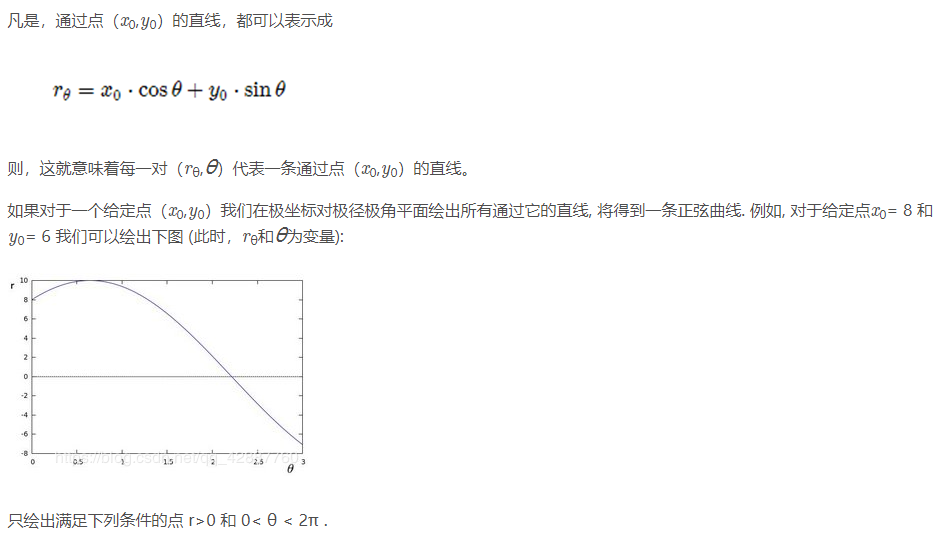
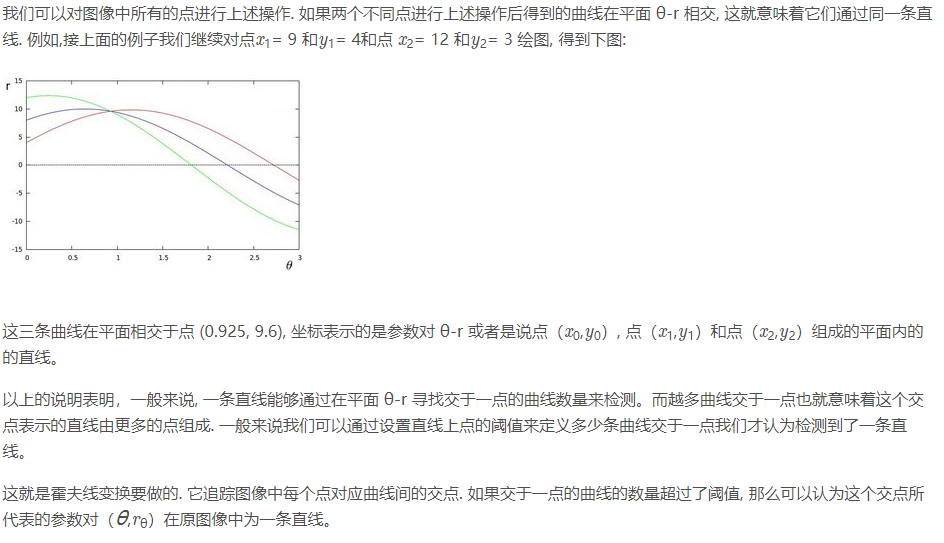
众所周知, 一条直线在图像二维空间可由两个变量表示. 如:
<1>在笛卡尔坐标系: 可由参数: 斜率和截距(m,b)表示。
<2>在极坐标系: 可由参数: 极径和极角(r, θ)表示。
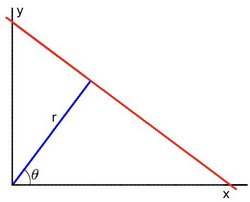
可以用极坐标系来表示直线. 因此, 直线的表达式可为:
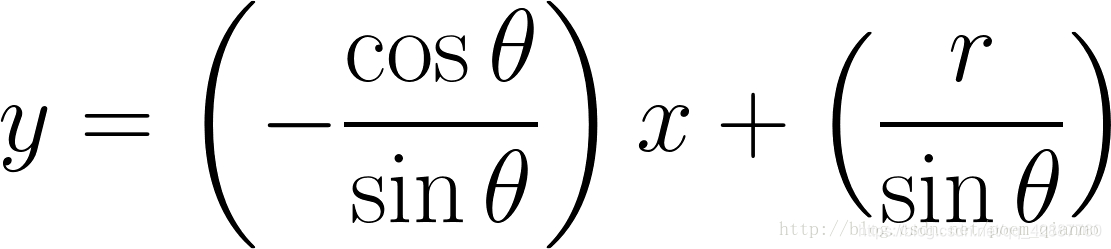
化简便可得到:

OpenCV中的霍夫线变换
霍夫线变换是一种用来寻找直线的方法. 在使用霍夫线变换之前, 首先要对图像进行边缘检测的处理,也即霍夫线变换的直接输入只能是边缘二值图像.
OpenCV支持三种不同的霍夫线变换,它们分别是:
标准霍夫变换(Standard Hough Transform,SHT),
多尺度霍夫变换(Multi-Scale Hough Transform,MSHT),
累计概率霍夫变换(Progressive Probabilistic Hough Transform ,PPHT)。
其中,多尺度霍夫变换(MSHT)为经典霍夫变换(SHT)在多尺度下的一个变种。累计概率霍夫变换(PPHT)算法是标准霍夫变换(SHT)算法的一个改进,它在一定的范围内进行霍夫变换,计算单独线段的方向以及范围,从而减少计算量,缩短计算时间。之所以称PPHT为“概率”的,是因为并不将累加器平面内的所有可能的点累加,而只是累加其中的一部分,该想法是如果峰值如果足够高,只用一小部分时间去寻找它就够了。这样猜想的话,可以实质性地减少计算时间。
在OpenCV中,我们可以用HoughLines函数来调用标准霍夫变换SHT和多尺度霍夫变换MSHT。
而HoughLinesP函数用于调用累计概率霍夫变换PPHT。累计概率霍夫变换执行效率很高,所有相比于HoughLines函数,我们更倾向于使用HoughLinesP函数。
总结一下,OpenCV中的霍夫线变换有如下三种:
<1>标准霍夫变换(StandardHough Transform,SHT),由HoughLines函数调用。
<2>多尺度霍夫变换(Multi-ScaleHough Transform,MSHT),由HoughLines函数调用。
<3>累计概率霍夫变换(ProgressiveProbabilistic Hough Transform,PPHT),由HoughLinesP函数调用。
相关的API介绍
1. HoughLines( )函数详解
标准的霍夫变换 cv::HoughLines从平面坐标转换到霍夫空间,最终输出是 (θ,rθ)表示极坐标空间
void HoughLines(InputArray image, OutputArray lines, double rho, double theta, int threshold, double srn=0, double stn=0 )
说明:
1 cv::HoughLines(
2 InputArray src, // 输入图像,必须8-bit的灰度图像
3 OutputArray lines, // 输出的极坐标来表示直线,经过调用HoughLines函数后储存了霍夫线变换检测到线条的输出矢量。每一条线由具有两个元素的矢量(ρ,θ)表示,其中,ρ是离坐标原点((0,0)(也就是图像的左上角)的距离。 θ是弧度线条旋转角度(0~ 垂直线,π/2~水平线)。
4 double rho, // 生成极坐标时候的像素扫描步长,一般取值为 1 ,不要大于图像尺寸的一半
5 double theta, //生成极坐标时候的角度步长,一般取值CV_PI/180,即表示一度
6 int threshold, // 阈值,只有获得足够交点的极坐标点才被看成是直线
7 double srn=0;// 是否应用多尺度的霍夫变换,如果不是设置0表示经典霍夫变换,多尺度表示的是使用图像金字塔,即多尺度图上进行霍夫变换
8 double stn=0;//是否应用多尺度的霍夫变换,如果不是设置0表示经典霍夫变换
9 double min_theta=0; // 表示角度扫描范围 0 ~180之间, 默认即可
10 double max_theta=CV_PI
11 ) // 一般情况是有经验的开发者使用,需要自己反变换到平面空间
2. HoughLinesP( )函数详解
此函数在HoughLines的基础上末尾加了一个代表Probabilistic(概率)的P,表明它可以采用累计概率霍夫变换(PPHT)来找出二值图像中的直线。
霍夫变换直线概率 cv::HoughLinesP最终输出是直线的两个点
void HoughLinesP(InputArray image, OutputArray lines, double rho, double theta, int threshold, double minLineLength=0, double maxLineGap=0 )
说明:
1 cv::HoughLinesP(
2 InputArray src, // 输入图像,必须8-bit的灰度图像
3 OutputArray lines, // 输出的极坐标来表示直线,经过调用HoughLinesP函数后后存储了检测到的线条的输出矢量,每一条线由具有四个元素的矢量(x_1,y_1, x_2, y_2) 表示,其中,(x_1, y_1)和(x_2, y_2) 是是每个检测到的线段的结束点。
4 double rho, // 生成极坐标时候的像素扫描步长,一般取值为 1
5 double theta, //生成极坐标时候的角度步长,一般取值CV_PI/180,即表示一度
6 int threshold, // 阈值,只有获得足够交点的极坐标点才被看成是直线
7 double minLineLength=0;// 最小直线长度,有默认值0,表示最低线段的长度,比这个设定参数短的线段就不能被显现出来。
8 double maxLineGap=0;// 最大间隔,有默认值0,允许将同一行点与点之间连接起来的最大的距离。
9 )
程序代码:
1 #include<opencv2/opencv.hpp>
2 #include<iostream>
3
4 using namespace std;
5 using namespace cv;
6
7 void main(int argc, char** argv)
8 {
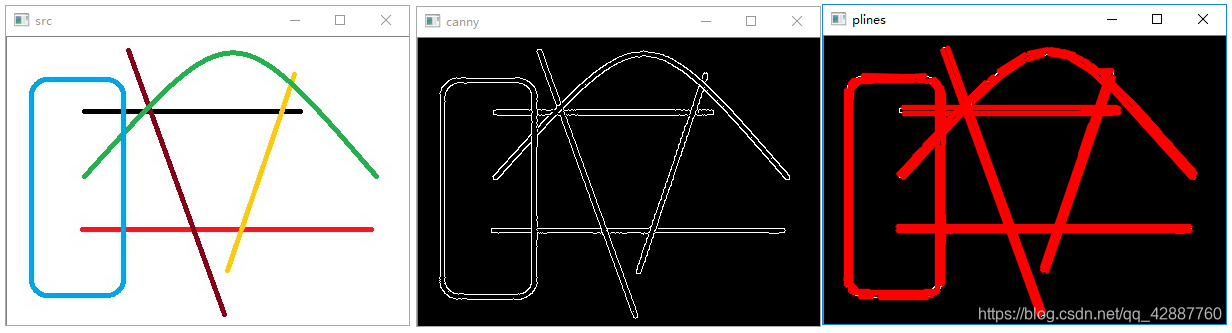
9 //1. 读取图像
10 Mat src, canny, dst;
11 src = imread("E:/Experiment/OpenCV/Pictures/LineTest.jpg");
12 imshow("src", src);
13
14 //2. 获取边缘
15 Canny(src, canny, 100, 200);
16 imshow("canny", canny);
17 //3. 转成灰度图像
18 cvtColor(canny, dst, CV_GRAY2BGR);//将二值图转换为RGB图颜色空间,这里重新创建一张空Mat也行
19 //4. 霍夫变换检测
20 vector<Vec4f> plines;//保存霍夫变换检测到的直线
21 HoughLinesP(canny, plines, 1, CV_PI / 180, 10, 0, 10);//提取边缘时,会造成有些点不连续,所以maxLineGap设大点
22 //5. 显示检测到的直线
23 Scalar color = Scalar(0, 0, 255);//设置颜色
24 for (size_t i = 0; i < plines.size(); i++)
25 {
26 Vec4f hline = plines[i];
27 line(dst, Point(hline[0], hline[1]), Point(hline[2], hline[3]), color, 3, LINE_AA);//绘制直线
28 }
29 imshow("plines", dst);
30
31 waitKey(0);
32 }
运行截图