/*
* 253. Theodore Roosevelt
* 题目:给出一个逆时针的凸包,然后再给出m个点,问这m个点是否至少有k个点在凸包里面
* (包括在边界上)
* 分析:O(n)的询问方式肯定TLE,所以我们可以像做动态凸包那种方式用set或者splay来维
* 护一个极角序,二分询问的那个点的极角,然后再用叉积判断即可。
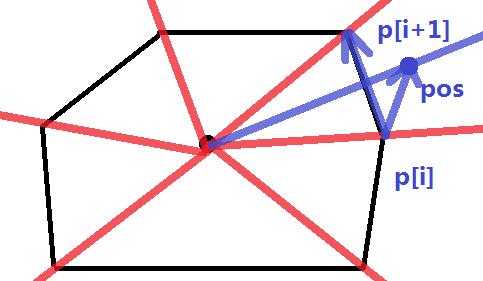
我们可以时刻用极角序维护一个凸包的点集。我们插入点pos的时候,我们可以计算出pos的极角,然后二分出pos的位置
(pos的极角恰好为p[i],p[i+1]中间)。然后判断叉积det(pos,p[i+1],p[i])是否新插入的点在凸包中。
*
* */
#include <cstdio>
#include <cstring>
#include <set>
#include <cmath>
#include <iostream>
#include <algorithm>
using namespace std;
typedef long long ll;
const double eps = 1e-8;
const int X = 100005;
int dcmp(double x){
if(fabs(x)<eps)
return 0;
return x>0?1:-1;
}
struct Point{
ll x,y;
double angle;
Point(){}
Point(ll _x,ll _y):x(_x),y(_y){}
friend bool operator < (Point a,Point b){
return dcmp(a.angle-b.angle)<0;
}
friend Point operator - (Point a,Point b){
return Point(a.x-b.x,a.y-b.y);
}
void input(){
scanf("%lld%lld",&x,&y);
angle = atan2(y,x);
}
};
set<Point> Convex;
int n,m,k;
ll det(Point a,Point b){
return a.x*b.y-a.y*b.x;
}
ll det(Point a,Point b,Point o){
return det(a-o , b-o);
}
Point Pre(Point pos){
set<Point>::iterator it = Convex.lower_bound(pos);
if(it==Convex.begin())
return *(--Convex.end());
return *(--it);
}
Point Next(Point pos){
set<Point>::iterator it = Convex.upper_bound(pos);
if(it==Convex.end())
return *Convex.begin();
return *it;
}
int cal(Point pos){
Point pre = Pre(pos);
Point next = Next(pre);
return det(pre,next,pos)>=0;
}
int main(){
//freopen("sumd.txt","r",stdin);
cin>>n>>m>>k;
Convex.clear();
Point pos;
for(int i=0;i<n;i++){
pos.input();
Convex.insert(pos);
}
int ans = 0;
while(m--){
pos.input();
ans += cal(pos);
if(ans>=k)
break;
}
ans>=k?puts("YES"):puts("NO");
return 0;
}