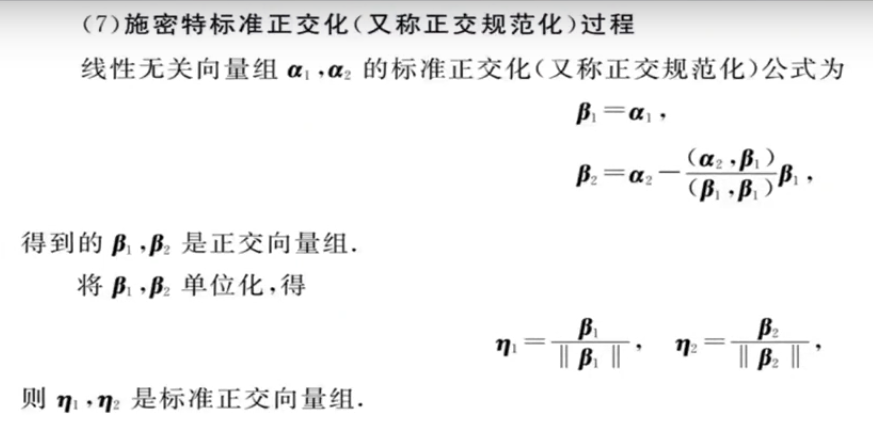
如图:向量阿尔法1和阿尔法2既不是正交的向量,也都不是单位向量,它们两个线性无关。
施密特标准正交化的过程如下(思路是不是正交的两个向量掰成正交):
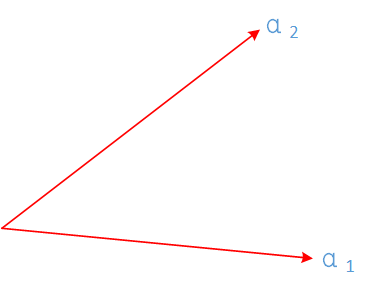
1. 任意找一个已给向量,记作贝塔1.如把阿尔法1记作贝塔1,

2. 对阿尔法2往阿尔法1投影.
投影下来的向量长度是:||α2||cosθ
投影下来的向量是:||α2||cosθ再乘以一个方向,投影下来的方向和阿尔法1的方向相同,取阿尔法1的单位向量就行(单位向量是带方向的),即:

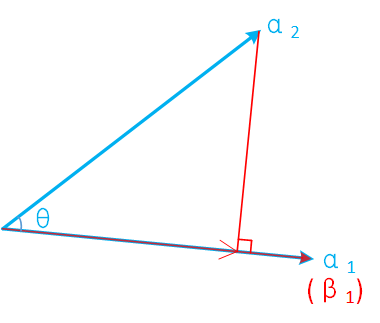
与阿尔法1正交的向量记作贝塔2,可以表示为:

化简:
再把贝塔1和贝塔2单位化,即可得到正交的单位向量组:
以上就是施密特正交化的过程。
注解:
- 线性无关的两个或者三个正交向量可以进行施密特标准正交化,进而化成像2维或者3维系中的坐标轴那样的正交单位向量组。
举例:
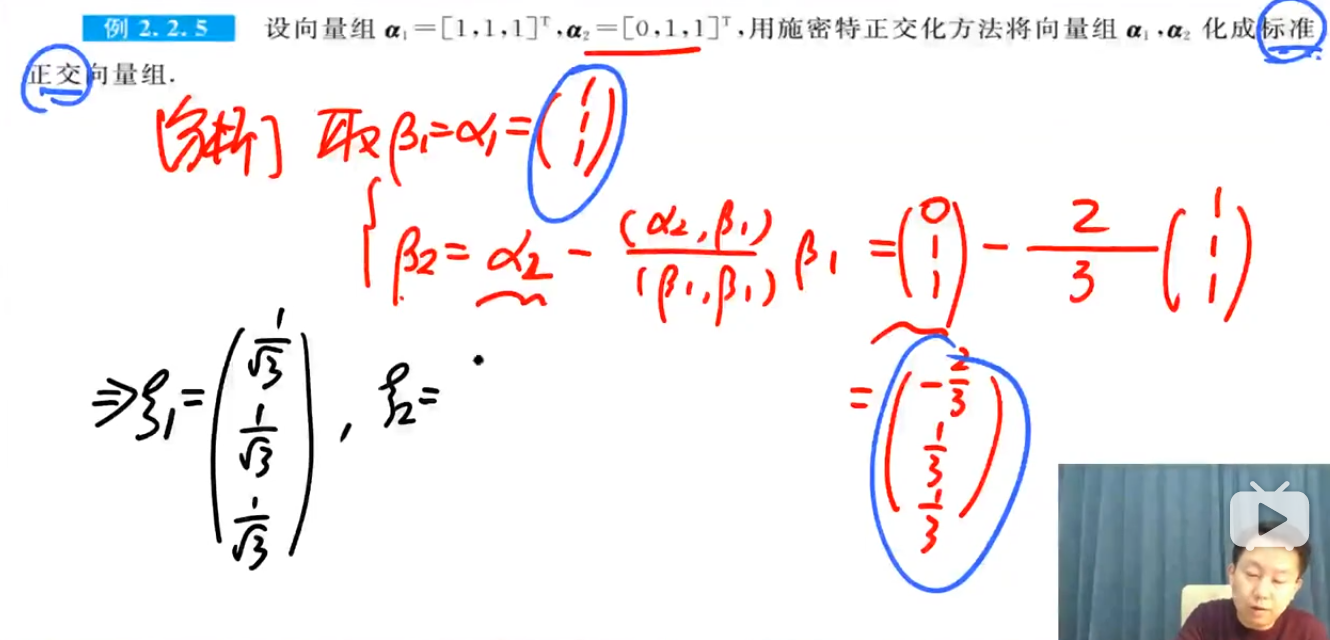
在计算单位向量ξ2的时候,不要直接对β1求平方和再开方,这样比较麻烦,可以先对它放大3倍,然后再求其单位向量,因为无论放大或者缩小几倍,求的单位向量都不会发生变化。
注解:
- 标准(规范)正交向量组和标准(规范)正交基的名字的差别是:前者一般指互相垂直的单位向量,如果是3维的话,可以只包含2个;后者的话如果是2维则包含2个,如果是3维,则包含3个,它们分别能组成坐标轴的2个或者3个轴。即前者不限定个数,后者个数限定(个数等于维数的标准正交向量组)。

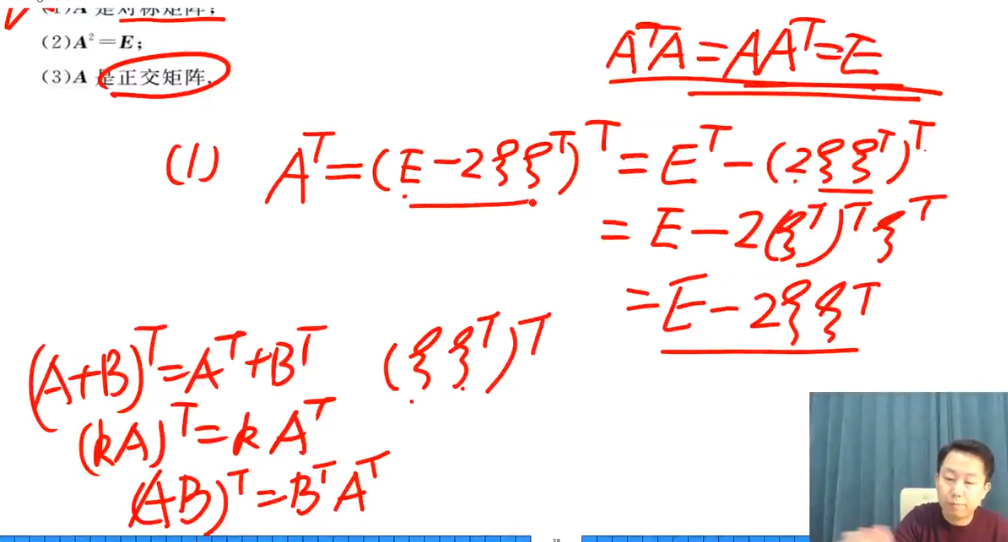
(1)中的式子由于矩阵不满足交换律一般是不成立的,但(2)是成立的,因为不涉及到矩阵的交换律,只涉及到A的m次幂。

注解:
- (9)的证明还是很复杂的。
- 对角阵极为重要。
- 对称矩阵也很重要(主对角线可以想象成是一面镜子)。

- 正交矩阵极为重要。

注解:
- AAT=E也能得出ATA=E。
证明:
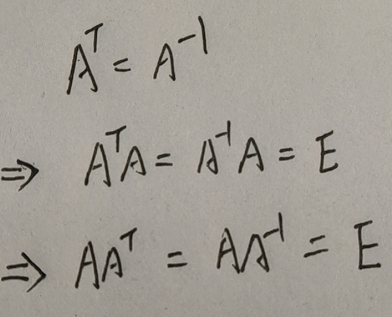
- 如果A(假如是3阶矩阵)是正交矩阵,则马上推出组成A的三个行都是单位向量,且两两正交。

注解:
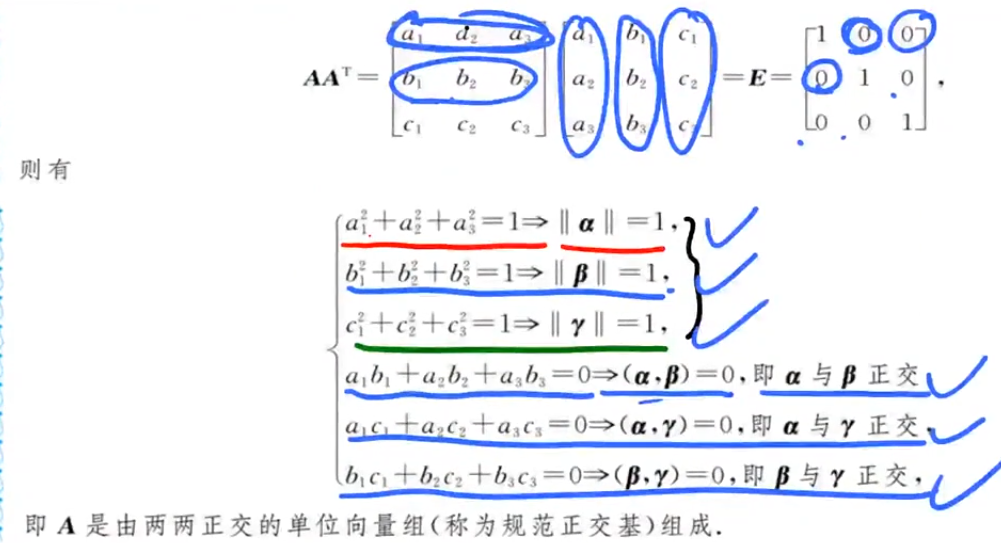
- A是正交矩阵,则表明组成A的行向量组是规范正交基。
- A是正交矩阵,则表明组成A的列向量组是规范正交基。
- 正交矩阵就是由规范正交基所拼成的矩阵。

注意:


注解:
- 给定一个矩阵,要学会倒着写。

注解:
- 矩阵中一个向量能由其它两个向量线性表示,则此矩阵的秩是1.秩的定义就是:矩阵中最大线性无关组的向量的个数。
- 一阶子式不为0,所有超过1阶的子式都为0,所以R=1.

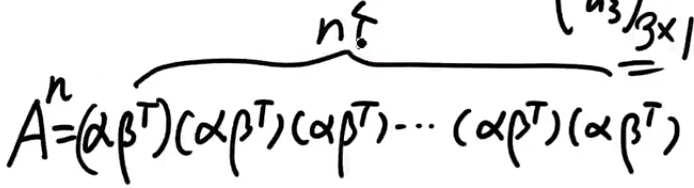
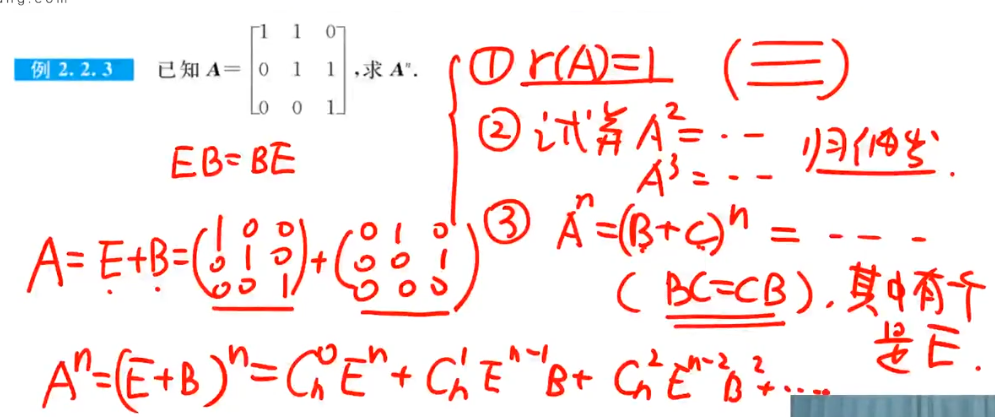
矩阵的乘法没有交换律但是有结合律。i.e., ABC=(AB)C=A(BC)。
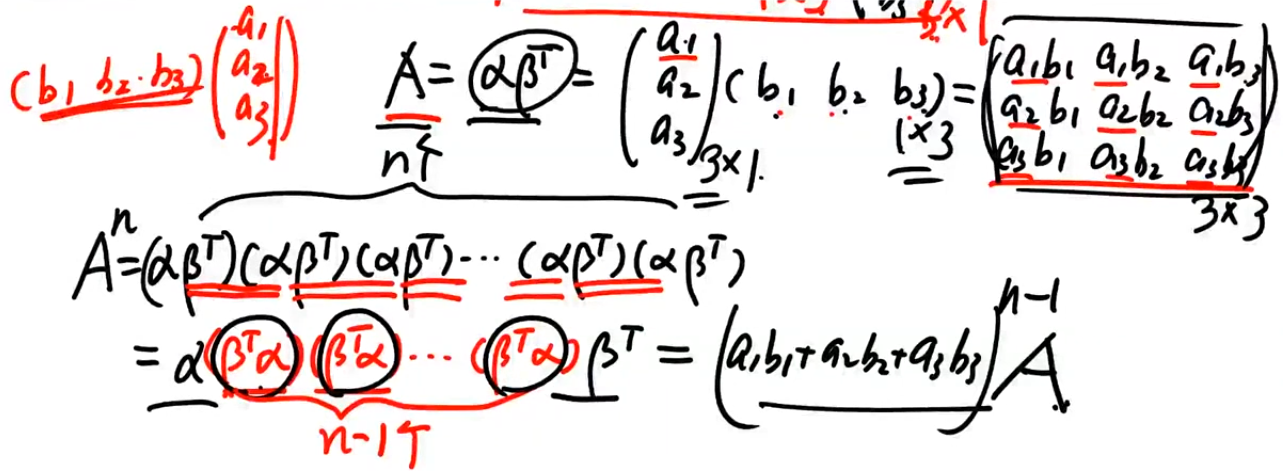
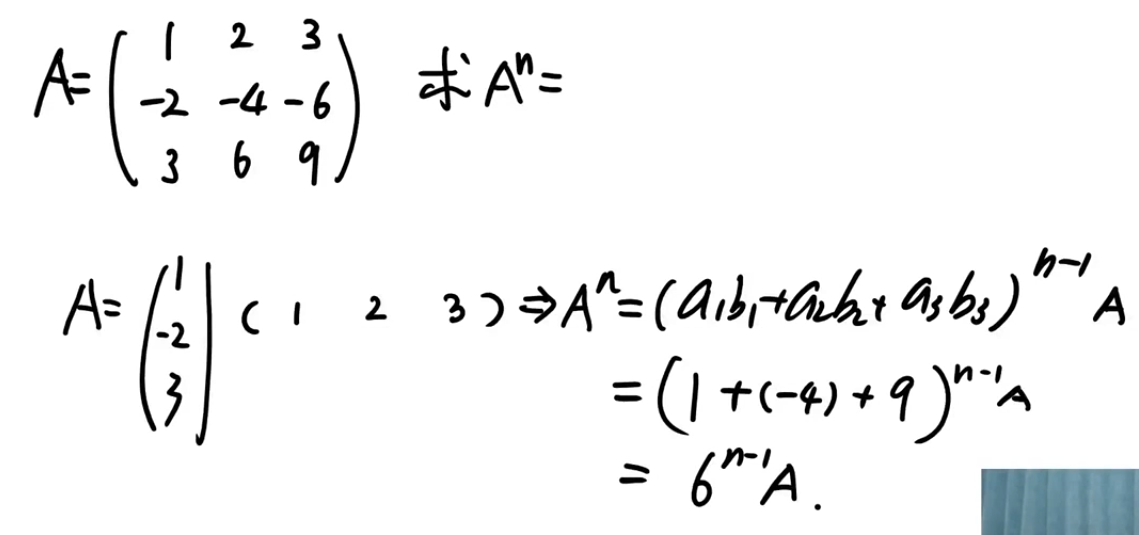

这种单行成比例秩为1的矩阵的n次方结果是主对角线元素的和的(n-1)次方,即矩阵的迹的(n-1)次方乘以矩阵本身,这个是偶然的吗?答:这个不是偶然,这是必然。

注解:
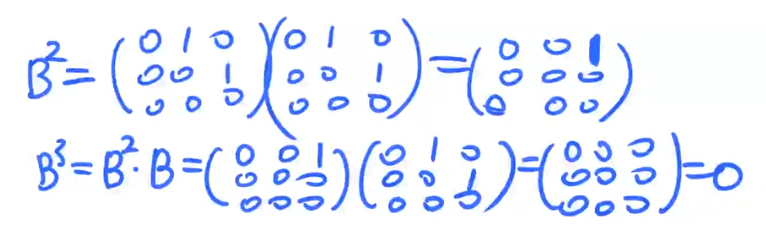
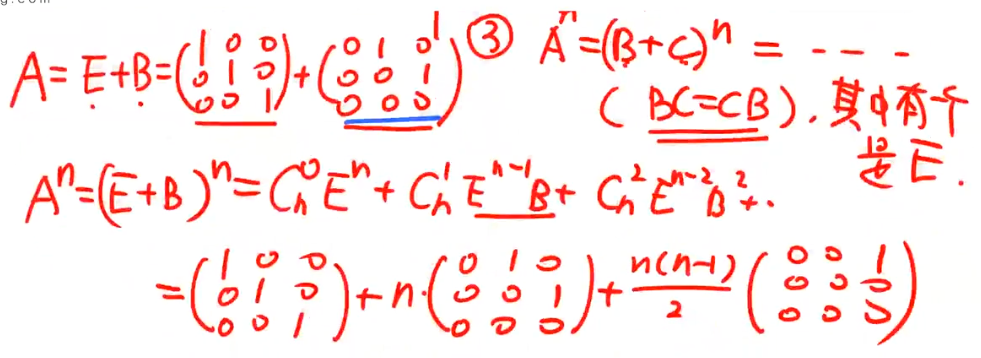
- B的3次方是0,那么B的比3次幂大的次幂都会为0.所以上面的二项式展开只写3项就行了
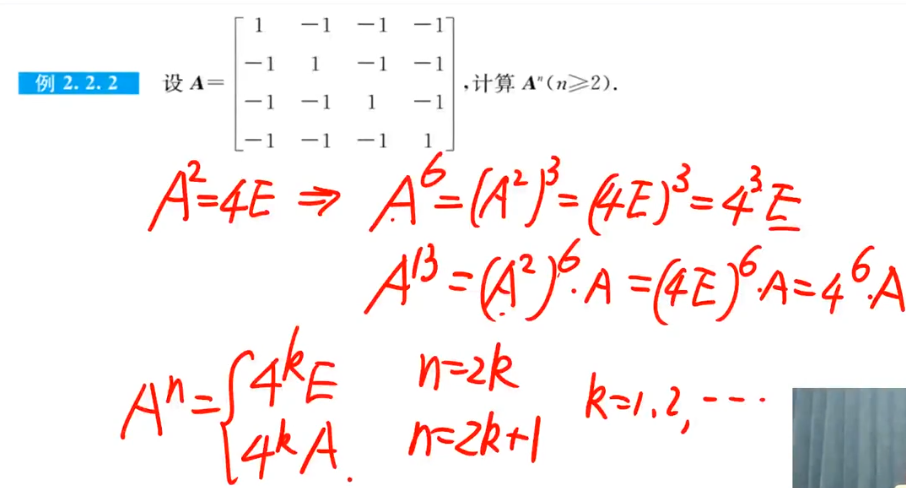
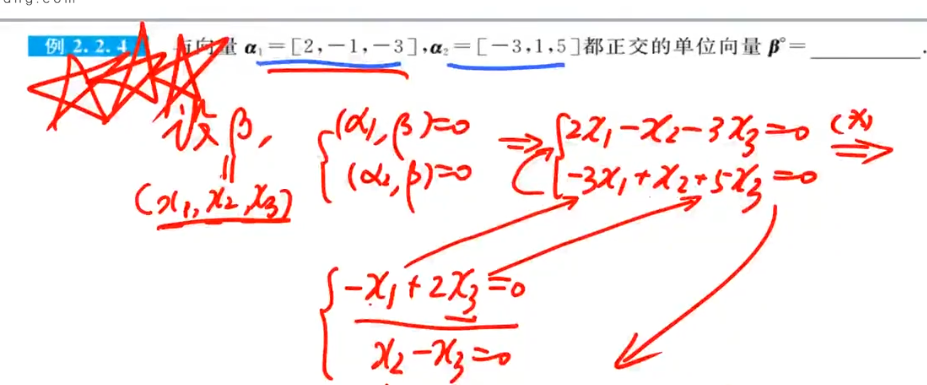
例题:

注解:
- 因为β0的方向不确定,所以答案要添加一个正负号。

第二问:

第3问:
