1、概述
通过风扇FG脚获取风扇转速。
2、分析
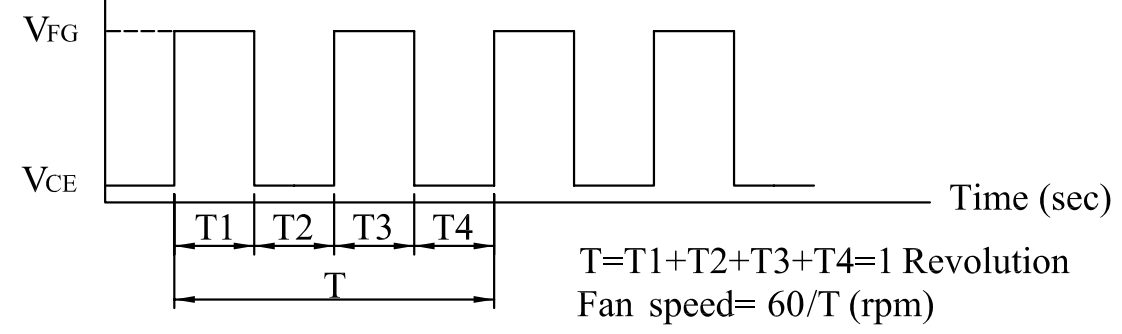
根据风扇规格书可知风扇风速=60/(2*脉冲周期),周期T=1/频率。那么我们需要获取FG脚上的脉冲频率,即可获取风扇风速。
3、解决方法
利用边沿触发中断利用定时器获取1s进入中断的次数即可获取脉冲频率。
(1)注册检测脚
gpio-pwms {
compatible = "gpio-pwms";
pinctrl-names = "default";
pwm1 {
label = "pwm1";
gpios = <&pio 0 6 GPIO_ACTIVE_HIGH>;
gpios-fg = <&pio 0 17 GPIO_ACTIVE_HIGH>;
};
pwm2 {
label = "pwm2";
gpios = <&pio 6 9 GPIO_ACTIVE_HIGH>;
gpios-fg = <&pio 0 3 GPIO_ACTIVE_HIGH>;
};
pwm3{
label = "pwm3";
gpios = <&pio 6 11 GPIO_ACTIVE_HIGH>;
gpios-fg = <&pio 0 21 GPIO_ACTIVE_HIGH>;
};
pwm4{
label = "pwm4";
gpios = <&pio 6 12 GPIO_ACTIVE_HIGH>;
gpios-fg = <&pio 0 20 GPIO_ACTIVE_HIGH>;
};
};
(2)编写驱动
-
解析dts文件,获取fg脚
for_each_child_of_node(node, fg)
{
enum of_gpio_flags flagsfg;
if (!of_find_property(fg, "gpios-fg", NULL))
{
pdata->npwms--;
printk( "Fail to find gpios-fg
");
continue;
}
pwm = &pdata->pwms[i++];
pwm->gpio_fg = of_get_named_gpio_flags(fg,"gpios-fg", 0, &flagsfg);
printk("pwm->gpio-fg=%d,flags=%d",pwm->gpio_fg,flagsfg);
if (pwm->gpio_fg < 0)
{
error = pwm->gpio_fg;
if (error != -ENOENT)
{
if (error != -EPROBE_DEFER)
dev_err(dev,
"Failed to get gpio-fg flags, error: %d
",
error);
return ERR_PTR(error);
}
}
}
-
申请中断
switch(gpiofg)
{
case 17:
error= devm_gpio_request(dev, gpiofg,"fan1_FG"); break;
case 3:
error= devm_gpio_request(dev, gpiofg,"fan2_FG"); break;
case 21:
error= devm_gpio_request(dev, gpiofg,"fan3_FG"); break;
case 20:
error= devm_gpio_request(dev, gpiofg,"fan4_FG"); break;
default:
break;
}
if (error){
printk( "unable to request gpio %u, err=%d
",
gpiofg, error);
}
gpwm->irq_fg= gpio_to_irq(gpiofg); //获取一个gpio对应的中断号
if (gpwm->irq_fg < 0)
{
printk("return irq number error!");
}
switch(gpiofg)
{
case 17:
pin1FGirq = gpwm->irq_fg;
INIT_WORK(&gpwm->gpiofg_work, fan1_speed); //初始化工作队列
irq_set_irq_type(gpwm->irq_fg, IRQ_TYPE_EDGE_FALLING); //设置触发类型
error = devm_request_irq(&pdev->dev, gpwm->irq_fg, get_fan_speed_irq_handler,
IRQF_SHARED,"fan1_FG", gpwm); //申请中断设置中断类型为 共享中断
break;
case 3:
pin2FGirq = gpwm->irq_fg;
INIT_WORK(&gpwm->gpiofg_work, fan2_speed);
error = devm_request_irq(&pdev->dev, gpwm->irq_fg, get_fan_speed_irq_handler,
IRQF_SHARED,"fan2_FG", gpwm);
break;
case 21:
pin3FGirq = gpwm->irq_fg;
INIT_WORK(&gpwm->gpiofg_work, fan3_speed);
error = devm_request_irq(&pdev->dev, gpwm->irq_fg, get_fan_speed_irq_handler,
IRQF_SHARED,"fan3_FG", gpwm);
break;
case 20:
pin4FGirq = gpwm->irq_fg;
INIT_WORK(&gpwm->gpiofg_work, fan4_speed);
error = devm_request_irq(&pdev->dev, gpwm->irq_fg, get_fan_speed_irq_handler,
IRQF_SHARED,"fan4_FG", gpwm);
break;
default:
break;
}
if (error) {
printk( "failed to request irq, err=%d
", error);
}
disable_irq(gpwm->irq_fg); //默认关闭中断
}
-
中断服务程序
static irqreturn_t get_fan_speed_irq_handler(int irq, void *dev_id)
{
struct pwm_chip *gpiofg_data = dev_id;
schedule_work(&gpiofg_data->gpiofg_work); //schedule_work(work)来通知内核线程,然后中断结束后,再去继续执行work对应的func函数
return IRQ_HANDLED;
}
注意:
//中断服务程序的返回值必须为IRQ_HANDLED
/**
* enum irqreturn
* @IRQ_NONE interrupt was not from this device or was not handled
* @IRQ_HANDLED interrupt was handled by this device
* @IRQ_WAKE_THREAD handler requests to wake the handler thread
*/
enum irqreturn {
IRQ_NONE = (0 << 0),
IRQ_HANDLED = (1 << 0),
IRQ_WAKE_THREAD = (1 << 1),
};
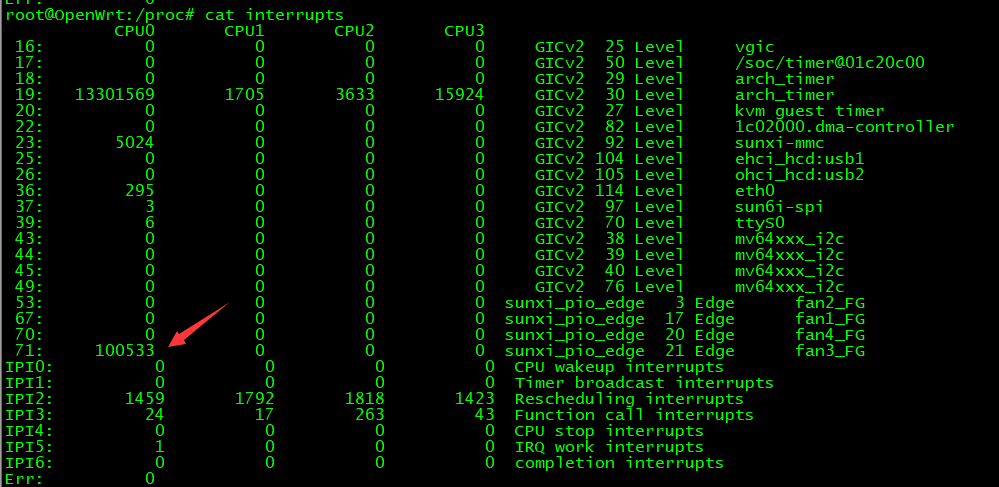
中断服务程序有三个返回值,三个值代表不同意思,如果返回值为IR_NONE,系统会认为这个中断没有被处理(但是中断程序执行了),当 未处理中断次数超过100000次时,系统会disable掉这个中断。系统会认为中断卡死了,这是共享中断的特性,会根据中断服务程序的返回值判断中断程序是否被处理。
当一个中断号上有多个中断共享的时候,该中断来的时候,内核会依次调用共享该中断号的各个中断处理函数,如果中断处理函数检测到该中断不是自己的中断时就会返回IRQ_NONE,这时内核就会调用下一个中断处理函数,而这些中断处理函数中必须至少有一个返回IRQ_HANDLED告知内核该中断是自己的中断,已经正常处理,若内核依次调用完所有该中断号的中断处理函数仍未得到IRQ_HANDLED的返回值,内核就会报告上述错误,并在该中断出现一定次数后关闭该中断。即只有中断处理函数返回 IRQ_HANDLED ,这个中断才是被正确完成的。
中断卡死的处理过程:
//Linux-4.14.25/kernel/irq/spurious.c
irq = irq_desc_get_irq(desc);
if (unlikely(try_misrouted_irq(irq, desc, action_ret))) {
int ok = misrouted_irq(irq);
if (action_ret == IRQ_NONE)
desc->irqs_unhandled -= ok;
}
desc->irq_count++;
if (likely(desc->irq_count < 100000))
return;
desc->irq_count = 0;
if (unlikely(desc->irqs_unhandled > 99900)) {
/*
* The interrupt is stuck
*/
__report_bad_irq(desc, action_ret);
/*
* Now kill the IRQ
*/
printk(KERN_EMERG "Disabling IRQ #%d
", irq);
desc->istate |= IRQS_SPURIOUS_DISABLED;
desc->depth++;
irq_disable(desc);
mod_timer(&poll_spurious_irq_timer,
jiffies + POLL_SPURIOUS_IRQ_INTERVAL);
}
desc->irqs_unhandled = 0;
}
查看中断信息:

-
工作队列的任务
static void fan1_speed(struct work_struct *ws)
{
pinFG1_frequency++;
}
static void fan2_speed(struct work_struct *ws)
{
pinFG2_frequency++;
}
static void fan3_speed(struct work_struct *ws)
{
pinFG3_frequency++;
}
static void fan4_speed(struct work_struct *ws)
{
pinFG4_frequency++;
}
工作队列的介绍
在中断处理中,经常用到工作队列,这样便能缩短中断处理时的时间
//工作队列初始化函数
INIT_WORK(work, func);
中断中通过调用schedule_work(work)来通知内核线程,然后中断结束后,再去继续执行work对应的func函数
示例
当中断来了,立马调用schedule_work(work),然后退出.
中断结束后,内核便会调用_work对应的func函数,最后才来读取按键值,上报按键值,这样就大大缩短了中断处理时间
-
定时器初始化
static void fan1_init_timer(void)
{
fan1timer.expires = jiffies+100;//设定 超时时间,100代表1秒?
timer_setup(&fan1timer, fan1_timer, 0);
add_timer(&fan1timer); //添加定时器,定时器开始生效
enable_irq(pin1FGirq);
}
static void fan2_init_timer(void)
{
fan2timer.expires = jiffies+100;//设定 超时时间,100代表1秒
timer_setup(&fan2timer, fan2_timer, 0); //准备timer,并设置超时时执行的函数。
add_timer(&fan2timer); //添加定时器,定时器开始生效
enable_irq(pin2FGirq);
}
static void fan3_init_timer(void)
{
fan3timer.expires = jiffies+100;//设定 超时时间,100代表1秒
timer_setup(&fan3timer, fan3_timer, 0);
add_timer(&fan3timer); //添加定时器,定时器开始生效
enable_irq(pin3FGirq);
}
static void fan4_init_timer(void)
{
fan4timer.expires = jiffies+100;//设定 超时时间,100代表1秒
timer_setup(&fan4timer, fan4_timer, 0);
add_timer(&fan4timer); //添加定时器,定时器开始生效
enable_irq(pin4FGirq);
}
-
定时器超时处理函数
static void fan1_timer(struct timer_list *t)
{
pinFG_frequency[0] = pinFG1_frequency;
pinFG1_frequency = 0;
mod_timer(&fan1timer,jiffies+100); // 修改定时器的expire
}
static void fan2_timer(struct timer_list *t)
{
pinFG_frequency[1] = pinFG2_frequency;
pinFG2_frequency = 0;
mod_timer(&fan2timer,jiffies+100);
}
static void fan3_timer(struct timer_list *t)
{
pinFG_frequency[2] = pinFG3_frequency;
pinFG3_frequency = 0;
mod_timer(&fan3timer,jiffies+100);
}
static void fan4_timer(struct timer_list *t)
{
pinFG_frequency[3] = pinFG4_frequency;
pinFG4_frequency = 0;
mod_timer(&fan4timer,jiffies+100);
}
-
read函数(应用层read会调用到这个函数)
ssize_t pwm_drv_read (struct file *filp, char __user *userbuf, size_t count, loff_t *fpos)
{
int ret=0, i = 0,j=0;
unsigned char tmp[8] ={0};
//应用层从内核读取数据时,只能一个字节一个字节读,所以将频率short型数据要分成两个单字节数据读。
while(i<8)
{
tmp[i] = pinFG_frequency[j]>>8 ;
tmp[i+1] = pinFG_frequency[j];
i+=2;
j++;
}
ret= copy_to_user(userbuf, tmp, sizeof(tmp)/sizeof(tmp[0]));
if(ret==1)
{
printk("copy data error!
");
ret = -1;
}
return ret;
(3)应用层获取数据
void fan_get_rotating_speed(uint16_t *arg,uint8_t len)
{
int fd=-1,ret=-1,i=0,j=0;
uint8_t recv_buff[8]={0};
uint16_t pinFG_Freqency[4]={0};
printf("fan_get_rotating_speed
");
fd = open(dev_fan[0].description,O_RDWR );
if(fd < 0)
{
printf("failed to open pwm0 failed!
");
}
//读取数据
ret = read(fd,recv_buff,len*2);
if(ret<0)
{
printf("get fan rotating speed error!");
}
//将8个字节的数据合成4个short型数据
while(i<8)
{
pinFG_Freqency[j] = (unsigned short)recv_buff[i]<<8|recv_buff[i+1];
i+=2;
j++;
}
//计算转速
for(i=0;i<len;i++)
{
arg[i]=(uint16_t)((60*pinFG_Freqency[i])/2);
}
close(fd);
}
driver-ipollo.c中去调用
else if (strcasecmp(option, "getallstats") == 0) {
char tmp_str[64] = { 0 };
uint16_t fan_speed[4]={0};
fan_get_rotating_speed(fan_speed,sizeof(fan_speed)/sizeof(fan_speed[0]));
sprintf(tmp_str, ""fanspeed[0:%d]:[1:%d][2:%d][3:%d]"",fan_speed[0],fan_speed[1],fan_speed[2],fan_speed[3]);
strcat(replybuf, tmp_str);
可通过命令去获取风速:
echo -n "ascset|0,getallstats" | nc 192.168.1.100 4028 && echo
