前言:
作为一个外行人,由于工作的需要实装SLAM,选择了一个比较新的SLAM算法,DSO开始学习。从论文开始研读,由于非专业而且未接触SLAM,对一些变量的理解也十分困难.经过学习论文结合网上SLAM大佬们的解析,对DSO论文中的公式也有了自己的理解,所以以笔记的形式几下,以加深记忆,如有问题请指正。
正文:
1.光度标定函数:
 (2)
(2)
 曝光时间
曝光时间
 晕影vignetting函数
晕影vignetting函数
 单位面积接受的能量
单位面积接受的能量
 标定函数
标定函数
2.能量函数:
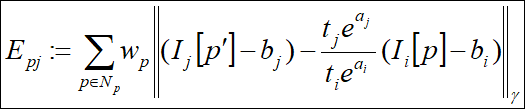 (4)
(4)
 光度仿射变换的参数:a,b,曝光时间:t
光度仿射变换的参数:a,b,曝光时间:t
 pattern 经过实验如图的排列方式的8个点:
pattern 经过实验如图的排列方式的8个点:
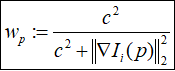 权重,深度越大权重越小
权重,深度越大权重越小
p' 是在p(Host Frame)点在Ij(Target Frame)的投影
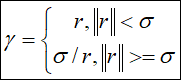 范数
范数
3.投影函数:
 (5)
(5)
 内参矩阵:三维坐标转换像素坐标
内参矩阵:三维坐标转换像素坐标
 内参矩阵的逆:像素坐标转换三维坐标
内参矩阵的逆:像素坐标转换三维坐标
 p点深度
p点深度
原函数理解:
R是Host Frame To Target Frame的旋转矩阵,t是Host Frame To Target Frame的平移矩阵:

 (6)
(6)
投影变换顺序:

李群表示:

TO DO:
项目换方案了,太监了!!!