import torch import numpy as np import torch.nn as nn from torch.autograd import Variable import torch.optim as optim from torch.utils.data import DataLoader from torchvision import datasets, transforms
batch_size = 64 learning_rate = 1e-2 num_epoches = 20
data_tf = transforms.Compose([transforms.ToTensor(), transforms.Normalize([0.5],[0.5])])
#transform.Compose() 将各种预处理操作组合在一起
#transform.ToTensor() 将数据转化为Tensor类型,并自动标准化,Tensor的取值是(0,1)
#transform.Normalize()是标准化操作,类似正太分布的标准化,第一个值是均值,第二个值是方差
#如果图像是三个通道,则transform.Normalize([a,b,c],[d,e,f])
train_dataset = datasets.MNIST(root = './mnist_data', train = True, transform = data_tf, download = True) #用datasets加载数据集,传入预处理 test_dataset = datasets.MNIST(root = './mnist_data', train = False,transform = data_tf) train_loader = DataLoader(train_dataset, batch_size = batch_size, shuffle = True) #利用DataLoader建立一个数据迭代器 test_loader = DataLoader(test_dataset, batch_size = batch_size, shuffle = False)
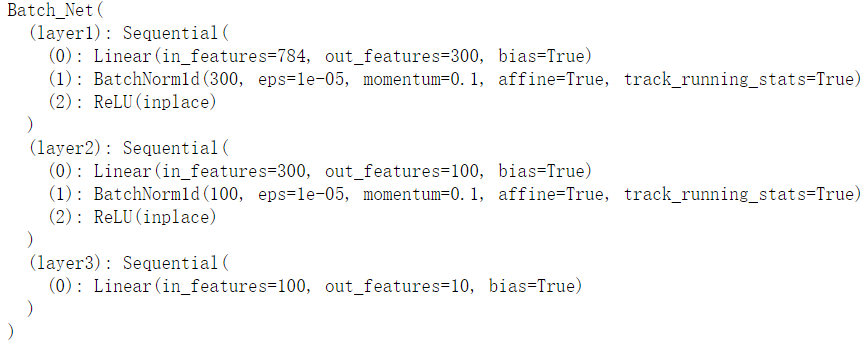
class Batch_Net(nn.Module): def __init__(self, inputdim, hidden1, hidden2, outputdim): super(Batch_Net, self).__init__() self.layer1 = nn.Sequential(nn.Linear(inputdim, hidden1), nn.BatchNorm1d(hidden1), nn.ReLU(True)) self.layer2 = nn.Sequential(nn.Linear(hidden1, hidden2), nn.BatchNorm1d(hidden2), nn.ReLU(True)) self.layer3 = nn.Sequential(nn.Linear(hidden2, outputdim)) def forward(self, x): x = self.layer1(x) x = self.layer2(x) x = self.layer3(x) return x
model = Batch_Net(28*28, 300, 100, 10)
model
定义损失函数和优化器
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(model.parameters(), lr = learning_rate)
训练模型
for epoch in range(num_epoches):
train_loss = 0
train_acc = 0
model.train() #这句话会自动调整batch_normalize和dropout值,很关键!
for img, label in train_loader:
img = img.view(img.size(0), -1) #将数据扁平化为一维
img = Variable(img)
label = Variable(label)
# 前向传播
out = model(img)
loss = criterion(out, label)
# 反向传播
optimizer.zero_grad()
loss.backward()
optimizer.step()
# 记录误差
train_loss += loss.item()
# 计算分类的准确率
_, pred = out.max(1)
num_correct = (pred == label).sum().item()
acc = num_correct / img.shape[0]
train_acc += acc
print('epoch:{},train_loss:{:.6f},acc:{:.6f}'.format(epoch+1, train_loss/len(train_loader), train_acc/len(train_loader)))
epoch:1,train_loss:0.002079,acc:0.999767 ...... epoch:19,train_loss:0.001532,acc:0.999917 epoch:20,train_loss:0.001670,acc:0.999850
测试集
model.eval() #在评估模型时使用,固定BN 和 Dropout eval_loss = 0 val_acc = 0 for img , label in test_loader: img = img.view(img.size(0), -1) img = Variable(img, volatile = True) #volatile=TRUE表示前向传播是不会保留缓存,因为测试集不需要反向传播 label = Variable(label, volatile = True) out = model(img) loss = criterion(out, label) eval_loss += loss.item() _,pred = torch.max(out, 1) num_correct = (pred == label).sum().item() print(num_correct) eval_acc = num_correct / label.shape[0] val_acc += eval_acc print('Test Loss:{:.6f}, Acc:{:.6f}'.format(eval_loss/len(test_loader), val_acc/len(test_loader)))
Test Loss:0.062413, Acc:0.981091