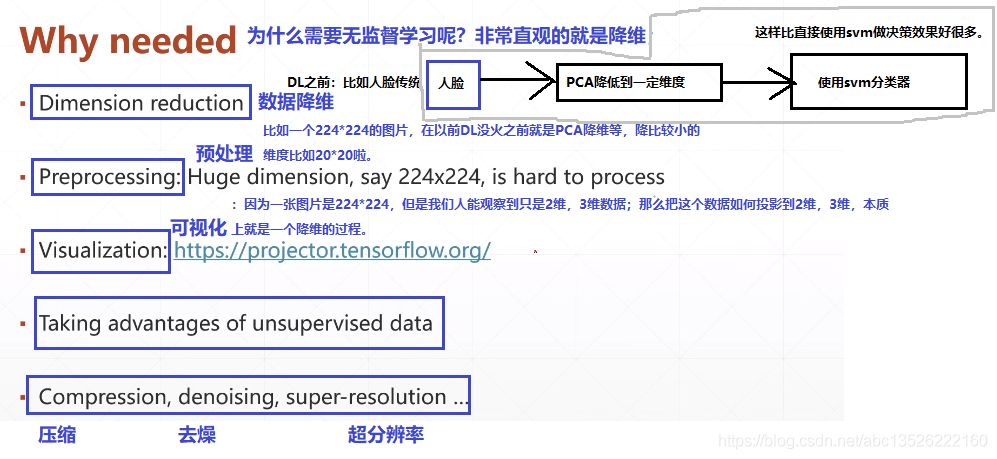
一、自编码器引入



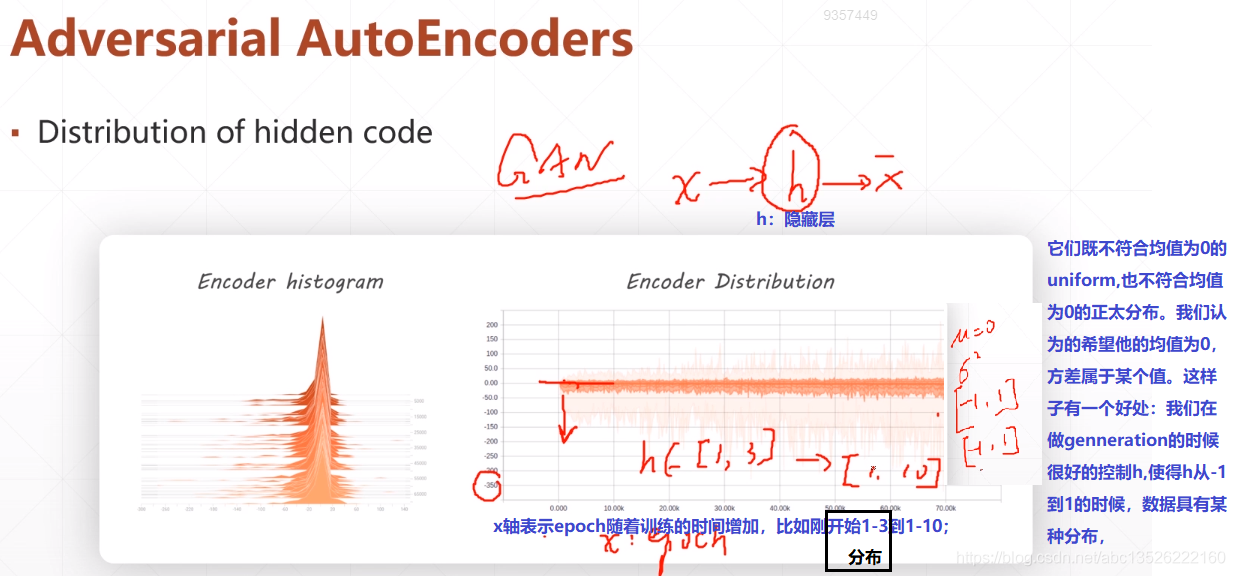
二、自编码器三种变体



三、基本自编码器实战

import os import numpy as np import tensorflow as tf from tensorflow import keras from PIL import Image from matplotlib import pyplot as plt from tensorflow.keras import Sequential, layers tf.random.set_seed(22) np.random.seed(22) os.environ['TF_CPP_MIN_LOG_LEVEL'] = '2' assert tf.__version__.startswith('2.') # 把多张image保存达到一张image里面去。 def save_images(img, name): new_im = Image.new('L', (280, 280)) index = 0 for i in range(0, 280, 28): for j in range(0, 280, 28): im = img[index] im = Image.fromarray(im, mode='L') new_im.paste(im, (i, j)) index += 1 new_im.save(name) # 定义超参数 h_dim = 20 # 把原来的784维护降低到20维度; batchsz = 512 # fashion_mnist lr = 1e-4 # 数据集加载 (x_train, y_train), (x_test, y_test) = keras.datasets.mnist.load_data() x_train, x_test = x_train.astype(np.float32) / 255., x_test.astype(np.float32) / 255. # we do not need label auto-encoder大家可以理解为无监督学习,标签其实就是本身,和自己对比; train_db = tf.data.Dataset.from_tensor_slices(x_train) train_db = train_db.shuffle(batchsz * 5).batch(batchsz) test_db = tf.data.Dataset.from_tensor_slices(x_test) test_db = test_db.batch(batchsz) print(x_train.shape, y_train.shape) print(x_test.shape, y_test.shape) # 搭建模型 class AE(keras.Model): # 1. 初始化部分 def __init__(self): super(AE, self).__init__() # 调用父类的函数 # Encoders编码, 网络 self.encoder = Sequential([ layers.Dense(256, activation=tf.nn.relu), layers.Dense(128, activation=tf.nn.relu), layers.Dense(h_dim) ]) # Decoders解码,网络 self.decoder = Sequential([ layers.Dense(128, activation=tf.nn.relu), layers.Dense(256, activation=tf.nn.relu), layers.Dense(784) ]) # 2. 前向传播的过程 def call(self, inputs, training=None): # [b, 784] ==> [b, 10] h = self.encoder(inputs) # [b, 10] ==> [b, 784] x_hat = self.decoder(h) return x_hat # 创建模型 model = AE() model.build(input_shape=(None, 784)) # 注意这里面用小括号还是中括号是有讲究的。建议使用tuple model.summary() optimizer = keras.optimizers.Adam(lr=lr) # optimizer = tf.optimizers.Adam() 都可以; for epoch in range(1000): for step, x in enumerate(train_db): # [b, 28, 28] => [b, 784] x = tf.reshape(x, [-1, 784]).numpy() with tf.GradientTape() as tape: x_rec_logits = model(x) # 把每个像素点当成一个二分类的问题; rec_loss = tf.losses.binary_crossentropy(x, x_rec_logits, from_logits=True) # rec_loss = tf.losses.MSE(x, x_rec_logits) rec_loss = tf.reduce_mean(rec_loss) grads = tape.gradient(rec_loss, model.trainable_variables) optimizer.apply_gradients(zip(grads, model.trainable_variables)) if step % 100 ==0: print('epoch: %3d, step:%4d, loss:%9f' %(epoch, step, float(rec_loss)))
if step % 100 ==0: print('epoch: %3d, step:%4d, loss:%9f' %(epoch, step, float(rec_loss))) ##################添加的代码################## # evaluation x = next(iter(test_db)) # 我们从test_db中取出一张图片; x_shape = tf.reshape(x, [-1, 784]).numpy() logits = model(x_shape) # 经过auto-encoder重建的效果。 x_hat= tf.sigmoid(logits) # 变化到0-1之间 # [b, 784] => [b, 28, 28] 还原成原始尺寸; x_hat = tf.reshape(x_hat, [-1, 28, 28]) # 重建得到的图片; # [b, 28, 28] => [2b, 28, 28] 和原图像拼接起来; x_concat = tf.concat([x, x_hat], axis=0) # 最外的维度拼接; x_concat = x_hat x_concat = x_concat.numpy() * 255. # 把数据numpy取出来,变成0-255区间; x_concat = x_concat.astype(np.uint8) # 还原成numpy保存图片的格式; save_images(x_concat, 'ae_image/rec_epoch_%d.png' %epoch) # 每个epoch保存一次。
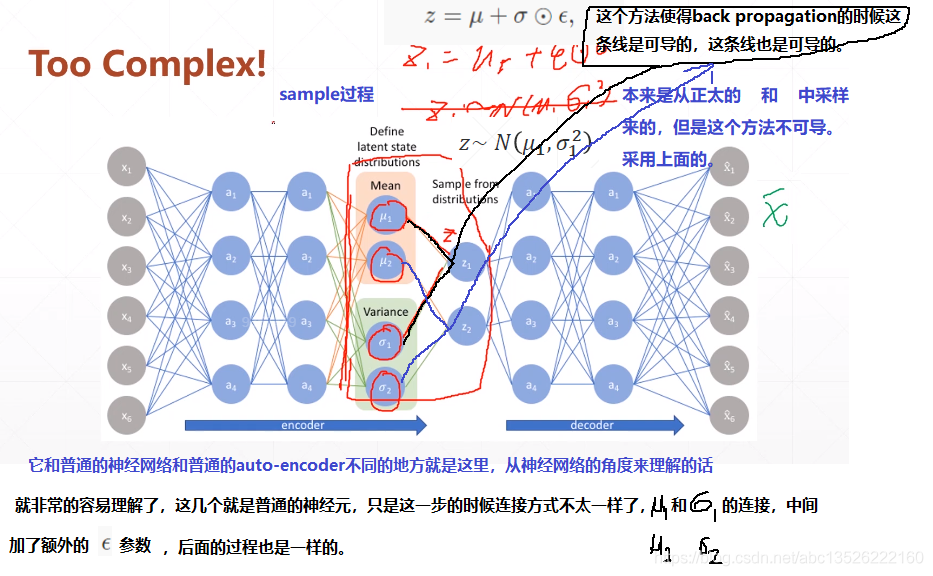
四、VAE实战

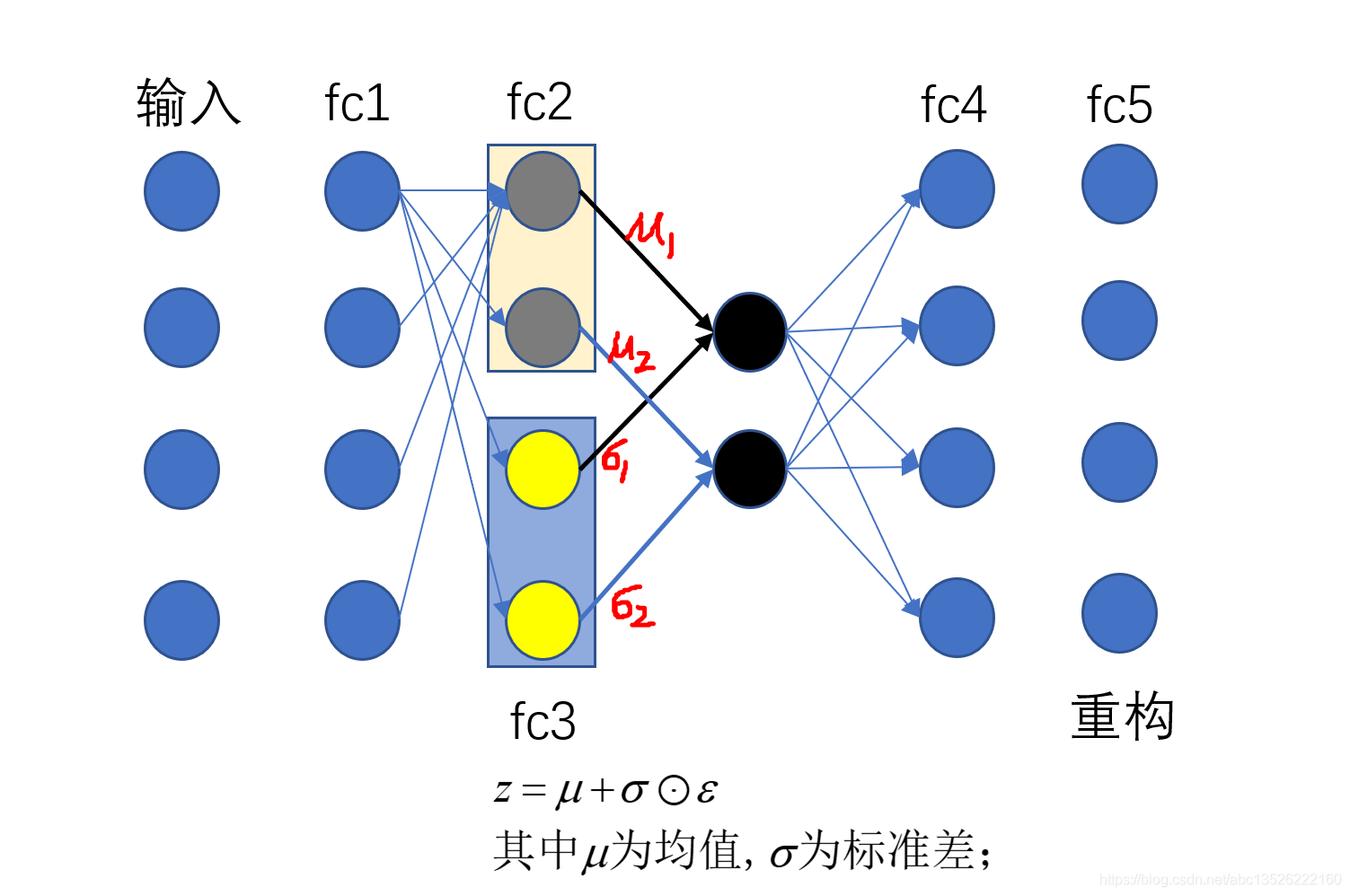
# 搭建模型 z_dim = 10 class VAE(keras.Model): def __init__(self): super(VAE, self).__init__() # Encoders编码, 网络 self.fc1 = layers.Dense(128, activation=tf.nn.relu) # 小网路1:均值(均值和方差是一一对应的,所以维度相同) self.fc2 = layers.Dense(z_dim) # get mean prediction # 小网路2 self.fc3 = layers.Dense(z_dim) # get mean prediction # Decoders解码,网络 self.fc4 = layers.Dense(128) self.fc5 = layers.Dense(784) # encoder传播的过程 def encoder(self, x): h = tf.nn.relu(self.fc1(x)) # get mean mu = self.fc2(h) # get variance log_var = self.fc3(h) return mu, log_var # 注意这里看成取了一个log函数; # decoder传播的过程 def decoder(self, z): out = tf.nn.relu(self.fc4(z)) out = self.fc5(out) return out def reparameterize(self, mu, log_var): eps = tf.random.normal(log_var.shape) var = tf.exp(log_var) # 去掉log, 得到方差; std = var**0.5 # 开根号,得到标准差; z = mu + std * eps return z def call(self, inputs, training=None): # [b, 784] => [b, z_dim], [b, z_dim] mu, log_var = self.encoder(inputs) # reparameterizaion trick:最核心的部分 z = self.reparameterize(mu, log_var) # decoder 进行还原 x_hat = self.decoder(z) # Variational auto-encoder除了前向传播不同之外,还有一个额外的约束;这个约束放在损失函数中; # 这个约束使得你的mu, var更接近正太分布;所以我们把mu, log_var返回; return x_hat, mu, log_var
注意:Variational auto-encoder 除了前向传播不同之外,还有一个额外的约束;这个约束放在损失函数中;这个约束使得你的 mu, var 更接近正太分布;所以我们把 mu, log_var 返回;
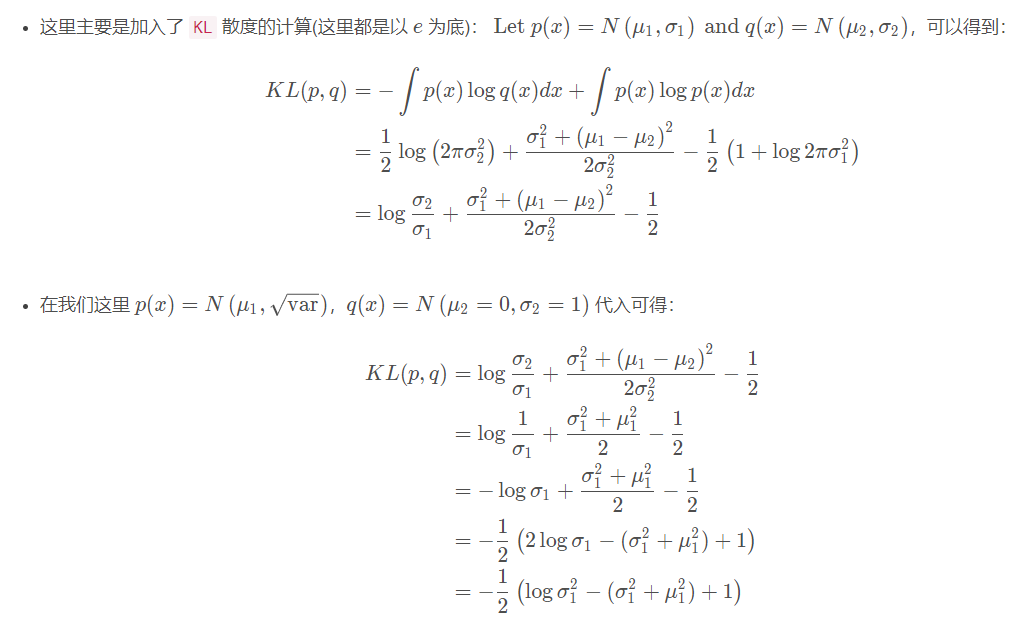
注意损失函数:
代码:
# compute kl divergence (mu, var) ~ N(0, 1): 我们得到的均值方差和正太分布的; # 链接参考: https://stats.stackexchange.com/questions/7440/kl-divergence-between-two-univariate-gaussians kl_div = -0.5 * (log_var + 1 -mu**2 - tf.exp(log_var)) kl_div = tf.reduce_mean(kl_div) / batchsz # x.shape[0]
完整代码:
import os import tensorflow as tf from tensorflow import keras from PIL import Image from matplotlib import pyplot as plt from tensorflow.keras import Sequential, layers import numpy as np tf.random.set_seed(22) np.random.seed(22) os.environ['TF_CPP_MIN_LOG_LEVEL'] = '2' assert tf.__version__.startswith('2.') # 把多张image保存达到一张image里面去。 def save_images(img, name): new_im = Image.new('L', (280, 280)) index = 0 for i in range(0, 280, 28): for j in range(0, 280, 28): im = img[index] im = Image.fromarray(im, mode='L') new_im.paste(im, (i, j)) index += 1 new_im.save(name) # 定义超参数 batchsz = 256 # fashion_mnist lr = 1e-4 # 数据集加载 (x_train, y_train), (x_test, y_test) = keras.datasets.fashion_mnist.load_data() x_train, x_test = x_train.astype(np.float32) / 255., x_test.astype(np.float32) / 255. # we do not need label auto-encoder大家可以理解为无监督学习,标签其实就是本身,和自己对比; train_db = tf.data.Dataset.from_tensor_slices(x_train) train_db = train_db.shuffle(batchsz * 5).batch(batchsz) test_db = tf.data.Dataset.from_tensor_slices(x_test) test_db = test_db.batch(batchsz) print(x_train.shape, y_train.shape) print(x_test.shape, y_test.shape) # 搭建模型 z_dim = 10 class VAE(keras.Model): def __init__(self): super(VAE, self).__init__() # Encoders编码, 网络 self.fc1 = layers.Dense(128, activation=tf.nn.relu) # 小网路1:均值(均值和方差是一一对应的,所以维度相同) self.fc2 = layers.Dense(z_dim) # get mean prediction # 小网路2 self.fc3 = layers.Dense(z_dim) # get mean prediction # Decoders解码,网络 self.fc4 = layers.Dense(128) self.fc5 = layers.Dense(784) # encoder传播的过程 def encoder(self, x): h = tf.nn.relu(self.fc1(x)) # get mean mu = self.fc2(h) # get variance log_var = self.fc3(h) return mu, log_var # decoder传播的过程 def decoder(self, z): out = tf.nn.relu(self.fc4(z)) out = self.fc5(out) return out def reparameterize(self, mu, log_var): eps = tf.random.normal(log_var.shape) std = tf.exp(log_var) # 去掉log, 得到方差; std = std**0.5 # 开根号,得到标准差; z = mu + std * eps return z def call(self, inputs, training=None): # [b, 784] => [b, z_dim], [b, z_dim] mu, log_var = self.encoder(inputs) # reparameterizaion trick:最核心的部分 z = self.reparameterize(mu, log_var) # decoder 进行还原 x_hat = self.decoder(z) # Variational auto-encoder除了前向传播不同之外,还有一个额外的约束; # 这个约束使得你的mu, var更接近正太分布;所以我们把mu, log_var返回; return x_hat, mu, log_var model = VAE() model.build(input_shape=(128, 784)) optimizer = keras.optimizers.Adam(lr=lr) for epoch in range(100): for step, x in enumerate(train_db): x = tf.reshape(x, [-1, 784]) with tf.GradientTape() as tape: # shape x_hat, mu, log_var = model(x) # 把每个像素点当成一个二分类的问题; rec_loss = tf.losses.binary_crossentropy(x, x_hat, from_logits=True) # rec_loss = tf.losses.MSE(x, x_rec_logits) rec_loss = tf.reduce_mean(rec_loss) # compute kl divergence (mu, var) ~ N(0, 1): 我们得到的均值方差和正太分布的; # 链接参考: https://stats.stackexchange.com/questions/7440/kl-divergence-between-two-univariate-gaussians kl_div = -0.5 * (log_var + 1 -mu**2 - tf.exp(log_var)) kl_div = tf.reduce_mean(kl_div) / batchsz # x.shape[0] loss = rec_loss + 1. * kl_div grads = tape.gradient(loss, model.trainable_variables) optimizer.apply_gradients(zip(grads, model.trainable_variables)) if step % 100 ==0: print('epoch: %3d, step:%4d, kl_div: %5f, rec_loss:%9f' %(epoch, step, float(kl_div), float(rec_loss)))
测试代码:
import os import tensorflow as tf from tensorflow import keras from PIL import Image from matplotlib import pyplot as plt from tensorflow.keras import Sequential, layers import numpy as np tf.random.set_seed(22) np.random.seed(22) os.environ['TF_CPP_MIN_LOG_LEVEL'] = '2' assert tf.__version__.startswith('2.') # 把多张image保存达到一张image里面去。 def save_images(img, name): new_im = Image.new('L', (280, 280)) index = 0 for i in range(0, 280, 28): for j in range(0, 280, 28): im = img[index] im = Image.fromarray(im, mode='L') new_im.paste(im, (i, j)) index += 1 new_im.save(name) # 定义超参数 batchsz = 256 # fashion_mnist lr = 1e-4 # 数据集加载 (x_train, y_train), (x_test, y_test) = keras.datasets.fashion_mnist.load_data() x_train, x_test = x_train.astype(np.float32) / 255., x_test.astype(np.float32) / 255. # we do not need label auto-encoder大家可以理解为无监督学习,标签其实就是本身,和自己对比; train_db = tf.data.Dataset.from_tensor_slices(x_train) train_db = train_db.shuffle(batchsz * 5).batch(batchsz) test_db = tf.data.Dataset.from_tensor_slices(x_test) test_db = test_db.batch(batchsz) print(x_train.shape, y_train.shape) print(x_test.shape, y_test.shape) # 搭建模型 z_dim = 10 class VAE(keras.Model): def __init__(self): super(VAE, self).__init__() # Encoders编码, 网络 self.fc1 = layers.Dense(128, activation=tf.nn.relu) # 小网路1:均值(均值和方差是一一对应的,所以维度相同) self.fc2 = layers.Dense(z_dim) # get mean prediction # 小网路2 self.fc3 = layers.Dense(z_dim) # get mean prediction # Decoders解码,网络 self.fc4 = layers.Dense(128) self.fc5 = layers.Dense(784) # encoder传播的过程 def encoder(self, x): h = tf.nn.relu(self.fc1(x)) # get mean mu = self.fc2(h) # get variance log_var = self.fc3(h) return mu, log_var # decoder传播的过程 def decoder(self, z): out = tf.nn.relu(self.fc4(z)) out = self.fc5(out) return out def reparameterize(self, mu, log_var): eps = tf.random.normal(log_var.shape) std = tf.exp(log_var) # 去掉log, 得到方差; std = std**0.5 # 开根号,得到标准差; z = mu + std * eps return z def call(self, inputs, training=None): # [b, 784] => [b, z_dim], [b, z_dim] mu, log_var = self.encoder(inputs) # reparameterizaion trick:最核心的部分 z = self.reparameterize(mu, log_var) # decoder 进行还原 x_hat = self.decoder(z) # Variational auto-encoder除了前向传播不同之外,还有一个额外的约束; # 这个约束使得你的mu, var更接近正太分布;所以我们把mu, log_var返回; return x_hat, mu, log_var model = VAE() model.build(input_shape=(128, 784)) optimizer = keras.optimizers.Adam(lr=lr) for epoch in range(100): for step, x in enumerate(train_db): x = tf.reshape(x, [-1, 784]) with tf.GradientTape() as tape: # shape x_hat, mu, log_var = model(x) # 把每个像素点当成一个二分类的问题; rec_loss = tf.losses.binary_crossentropy(x, x_hat, from_logits=True) # rec_loss = tf.losses.MSE(x, x_rec_logits) rec_loss = tf.reduce_mean(rec_loss) # compute kl divergence (mu, var) ~ N(0, 1): 我们得到的均值方差和正太分布的; # 链接参考: https://stats.stackexchange.com/questions/7440/kl-divergence-between-two-univariate-gaussians kl_div = -0.5 * (log_var + 1 -mu**2 - tf.exp(log_var)) kl_div = tf.reduce_mean(kl_div) / batchsz # x.shape[0] loss = rec_loss + 1. * kl_div grads = tape.gradient(loss, model.trainable_variables) optimizer.apply_gradients(zip(grads, model.trainable_variables)) if step % 100 ==0: print('epoch: %3d, step:%4d, kl_div: %5f, rec_loss:%9f' %(epoch, step, float(kl_div), float(rec_loss))) # evaluation 1: 从正太分布直接sample; z = tf.random.normal((batchsz, z_dim)) # 从正太分布中sample这个尺寸的 logits = model.decoder(z) # 通过这个得到decoder x_hat = tf.sigmoid(logits) x_hat = tf.reshape(x_hat, [-1, 28, 28]).numpy() * 255. logits = x_hat.astype(np.uint8) # 标准的图片格式; save_images(x_hat, 'vae_images/sampled_epoch%d.png' %epoch) # 直接sample出的正太分布; # evaluation 2: 正常的传播过程; x = next(iter(test_db)) x = tf.reshape(x, [-1, 784]) x_hat_logits, _, _ = model(x) # 前向传播返回的还有mu, log_var x_hat = tf.sigmoid(x_hat_logits) x_hat = tf.reshape(x_hat, [-1, 28, 28]).numpy() * 255. x_hat = x_hat.astype(np.uint8) # 标准的图片格式; # print(x_hat.shape) save_images(x_hat, 'vae_images/rec_epoch%d.png' %epoch)
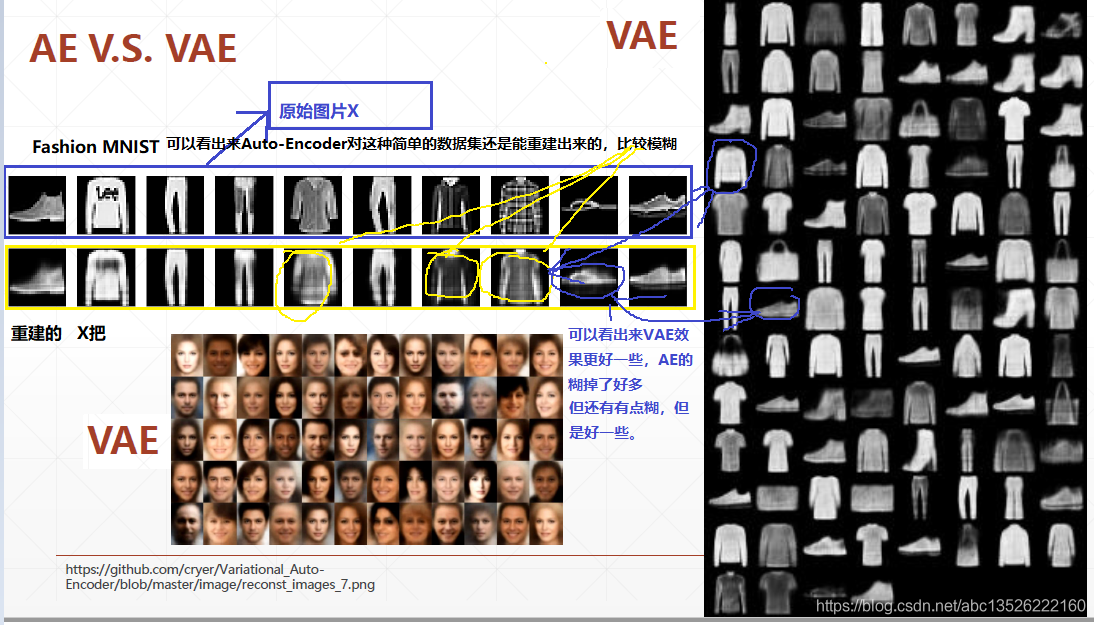
注意: 我们发现重建的图片相对原始图片存在模糊的现象,棱角美誉原图像那么锐利。这是因为 auto-encoder 求出来的 loss 是根据 distance (它会追求你的整体的 loss 变的更小,所以会存在模糊掉,所以图片的保真度不是特别好,这其实也是 GAN 存在的现象!)
五、原始代码
1、AE.py
import os os.environ['TF_CPP_MIN_LOG_LEVEL']='2' import tensorflow as tf import numpy as np from tensorflow import keras from tensorflow.keras import Sequential, layers from PIL import Image from matplotlib import pyplot as plt tf.random.set_seed(22) np.random.seed(22) assert tf.__version__.startswith('2.') def save_images(imgs, name): new_im = Image.new('L', (280, 280)) index = 0 for i in range(0, 280, 28): for j in range(0, 280, 28): im = imgs[index] im = Image.fromarray(im, mode='L') new_im.paste(im, (i, j)) index += 1 new_im.save(name) h_dim = 20 batchsz = 512 lr = 1e-3 (x_train, y_train), (x_test, y_test) = keras.datasets.fashion_mnist.load_data() x_train, x_test = x_train.astype(np.float32) / 255., x_test.astype(np.float32) / 255. # we do not need label train_db = tf.data.Dataset.from_tensor_slices(x_train) train_db = train_db.shuffle(batchsz * 5).batch(batchsz) test_db = tf.data.Dataset.from_tensor_slices(x_test) test_db = test_db.batch(batchsz) print(x_train.shape, y_train.shape) print(x_test.shape, y_test.shape) class AE(keras.Model): def __init__(self): super(AE, self).__init__() # Encoders self.encoder = Sequential([ layers.Dense(256, activation=tf.nn.relu), layers.Dense(128, activation=tf.nn.relu), layers.Dense(h_dim) ]) # Decoders self.decoder = Sequential([ layers.Dense(128, activation=tf.nn.relu), layers.Dense(256, activation=tf.nn.relu), layers.Dense(784) ]) def call(self, inputs, training=None): # [b, 784] => [b, 10] h = self.encoder(inputs) # [b, 10] => [b, 784] x_hat = self.decoder(h) return x_hat model = AE() model.build(input_shape=(None, 784)) model.summary() optimizer = tf.optimizers.Adam(lr=lr) for epoch in range(100): for step, x in enumerate(train_db): #[b, 28, 28] => [b, 784] x = tf.reshape(x, [-1, 784]) with tf.GradientTape() as tape: x_rec_logits = model(x) rec_loss = tf.losses.binary_crossentropy(x, x_rec_logits, from_logits=True) rec_loss = tf.reduce_mean(rec_loss) grads = tape.gradient(rec_loss, model.trainable_variables) optimizer.apply_gradients(zip(grads, model.trainable_variables)) if step % 100 ==0: print(epoch, step, float(rec_loss)) # evaluation x = next(iter(test_db)) logits = model(tf.reshape(x, [-1, 784])) x_hat = tf.sigmoid(logits) # [b, 784] => [b, 28, 28] x_hat = tf.reshape(x_hat, [-1, 28, 28]) # [b, 28, 28] => [2b, 28, 28] x_concat = tf.concat([x, x_hat], axis=0) x_concat = x_hat x_concat = x_concat.numpy() * 255. x_concat = x_concat.astype(np.uint8) save_images(x_concat, 'ae_images/rec_epoch_%d.png'%epoch)
2、VAE.py
import os os.environ['TF_CPP_MIN_LOG_LEVEL']='2' import tensorflow as tf import numpy as np from tensorflow import keras from tensorflow.keras import Sequential, layers from PIL import Image from matplotlib import pyplot as plt tf.random.set_seed(22) np.random.seed(22) assert tf.__version__.startswith('2.') def save_images(imgs, name): new_im = Image.new('L', (280, 280)) index = 0 for i in range(0, 280, 28): for j in range(0, 280, 28): im = imgs[index] im = Image.fromarray(im, mode='L') new_im.paste(im, (i, j)) index += 1 new_im.save(name) h_dim = 20 batchsz = 512 lr = 1e-3 (x_train, y_train), (x_test, y_test) = keras.datasets.fashion_mnist.load_data() x_train, x_test = x_train.astype(np.float32) / 255., x_test.astype(np.float32) / 255. # we do not need label train_db = tf.data.Dataset.from_tensor_slices(x_train) train_db = train_db.shuffle(batchsz * 5).batch(batchsz) test_db = tf.data.Dataset.from_tensor_slices(x_test) test_db = test_db.batch(batchsz) print(x_train.shape, y_train.shape) print(x_test.shape, y_test.shape) z_dim = 10 class VAE(keras.Model): def __init__(self): super(VAE, self).__init__() # Encoder self.fc1 = layers.Dense(128) self.fc2 = layers.Dense(z_dim) # get mean prediction self.fc3 = layers.Dense(z_dim) # Decoder self.fc4 = layers.Dense(128) self.fc5 = layers.Dense(784) def encoder(self, x): h = tf.nn.relu(self.fc1(x)) # get mean mu = self.fc2(h) # get variance log_var = self.fc3(h) return mu, log_var def decoder(self, z): out = tf.nn.relu(self.fc4(z)) out = self.fc5(out) return out def reparameterize(self, mu, log_var): eps = tf.random.normal(log_var.shape) std = tf.exp(log_var)**0.5 z = mu + std * eps return z def call(self, inputs, training=None): # [b, 784] => [b, z_dim], [b, z_dim] mu, log_var = self.encoder(inputs) # reparameterization trick z = self.reparameterize(mu, log_var) x_hat = self.decoder(z) return x_hat, mu, log_var model = VAE() model.build(input_shape=(4, 784)) optimizer = tf.optimizers.Adam(lr) for epoch in range(1000): for step, x in enumerate(train_db): x = tf.reshape(x, [-1, 784]) with tf.GradientTape() as tape: x_rec_logits, mu, log_var = model(x) rec_loss = tf.nn.sigmoid_cross_entropy_with_logits(labels=x, logits=x_rec_logits) rec_loss = tf.reduce_sum(rec_loss) / x.shape[0] # compute kl divergence (mu, var) ~ N (0, 1) # https://stats.stackexchange.com/questions/7440/kl-divergence-between-two-univariate-gaussians kl_div = -0.5 * (log_var + 1 - mu**2 - tf.exp(log_var)) kl_div = tf.reduce_sum(kl_div) / x.shape[0] loss = rec_loss + 1. * kl_div grads = tape.gradient(loss, model.trainable_variables) optimizer.apply_gradients(zip(grads, model.trainable_variables)) if step % 100 == 0: print(epoch, step, 'kl div:', float(kl_div), 'rec loss:', float(rec_loss)) # evaluation z = tf.random.normal((batchsz, z_dim)) logits = model.decoder(z) x_hat = tf.sigmoid(logits) x_hat = tf.reshape(x_hat, [-1, 28, 28]).numpy() *255. x_hat = x_hat.astype(np.uint8) save_images(x_hat, 'vae_images/sampled_epoch%d.png'%epoch) x = next(iter(test_db)) x = tf.reshape(x, [-1, 784]) x_hat_logits, _, _ = model(x) x_hat = tf.sigmoid(x_hat_logits) x_hat = tf.reshape(x_hat, [-1, 28, 28]).numpy() *255. x_hat = x_hat.astype(np.uint8) save_images(x_hat, 'vae_images/rec_epoch%d.png'%epoch)
转自:https://zhangkaifang.blog.csdn.net/article/details/90297041
附录——正态分布:
正态分布(Normal distribution),也称“常态分布”,又名高斯分布(Gaussian distribution)。
正态曲线呈钟型,两头低,中间高,左右对称因其曲线呈钟形,因此人们又经常称之为钟形曲线。
在TF中会大量使用到正态分布,熟练的使用它,也是使用TF的基本功之一。下面来看一下在Python中如何使用。
一维正态分布

用numpy来获取一个标准正态分布的样例
num = 100000
mu = 0
sigma = 1
s = np.random.normal(mu, sigma, num)
一维正太分布如上面定义所说,正如一个“钟形”

或者如下两者
s = sigma * np.random.randn(num) + mu
和
s = sigma * np.random.standard_normal(num) + mu
效果都如之前的图片
mu控制函数中心位置左右移动,如下mu=6的场景

sigma=10的场景

可见,mu为正数,函数曲线向右移动,反之,向左移动;sigma越大,分布越宽;sigma越小分布越窄。
记住这个特性,在获取一维正太分布数据时很有帮助。
二维正太分布
二维正太分布的公式如下,

二维正太分布使用不一样的numpy函数,multivariate_normal
num = 40000
mean = np.array([0,0])
cov = np.eye(2)
ms = np.random.multivariate_normal(mean, cov, num)
二维标准正太分布如下,不在是一个“钟”,而像一个“圆”

这里的参数也有变化。
mean表示二维数组每一维的均值;是一个(1,2)矩阵。
cov表示二维数组的协方差;是一个(2,2)矩阵。
可以看出来mean是圆的圆点,那么是不是改变了mean,圆就会发生移动呢? 我们试一下。
num = 40000
mean = np.array([4,8])
cov = np.eye(2)
ms = np.random.multivariate_normal(mean, cov, num)

那么cov协方差代表的意义也通过实验来看一下,
num = 40000
mean = np.array([0,0])
cov = np.array([[5,0],[0,1]])
ms = np.random.multivariate_normal(mean, cov, num)
