一、简介
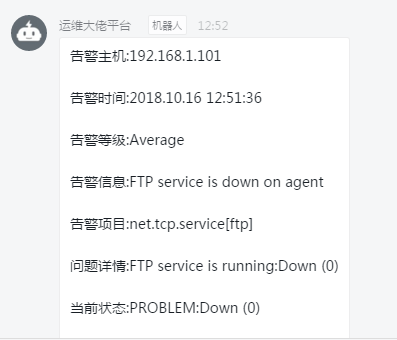
群机器人是钉钉群的高级扩展功能。群机器人可以将第三方服务的信息聚合到群聊中,实现自动化的信息同步。例如:通过聚合GitHub,GitLab等源码管理服务,实现源码更新同步;通过聚合Trello,JIRA等项目协调服务,实现项目信息同步。不仅如此,群机器人支持Webhook协议的自定义接入,支持更多可能性,例如:你可将运维报警提醒通过自定义机器人聚合到钉钉群。
二、创建叮叮机器人
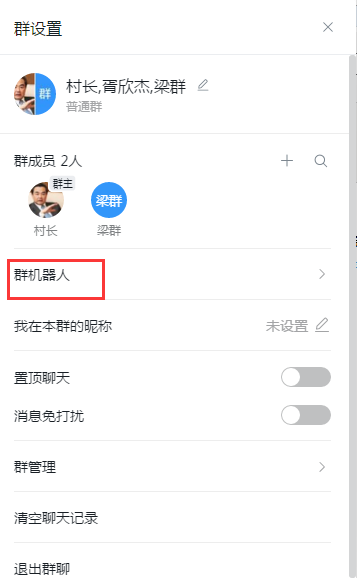
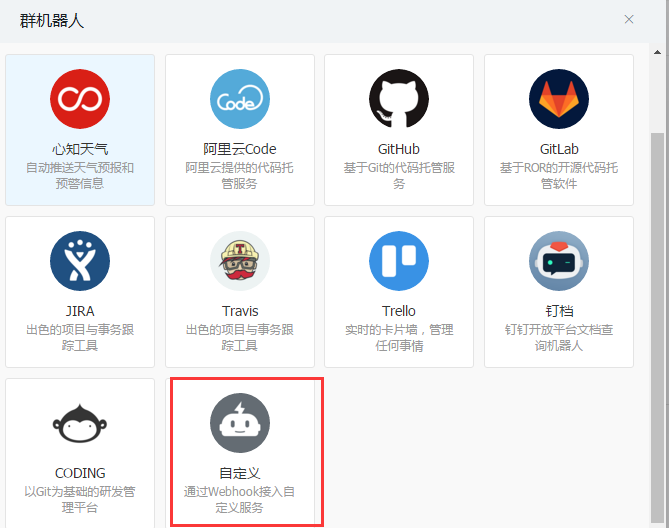
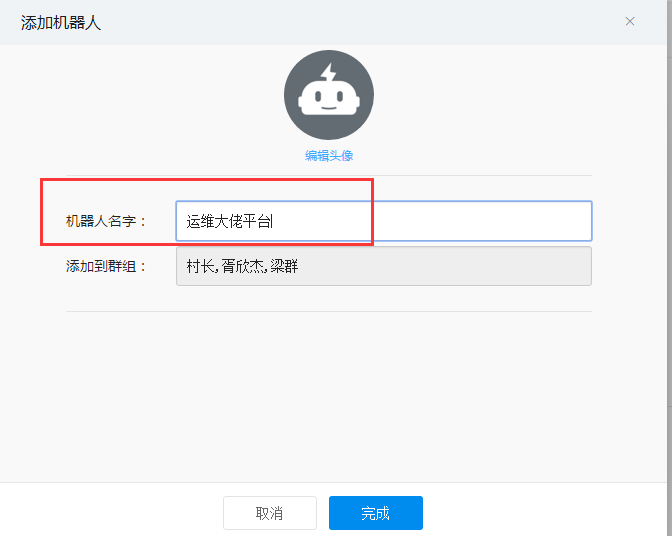
创建机器人名称
编写脚本
zabbix_server路径:
/usr/lib/zabbix/alertscripts
#!/usr/bin/python # -*- coding: utf-8 -*- import requests import json import sys import os headers = {'Content-Type': 'application/json;charset=utf-8'} api_url = "https://oapi.dingtalk.com/robot/send?access_token=e0fb9f42d72ca30d9b762722d3c98d025949a0c124238989ccf7afab5c615ce2" #需要更换你机器人的地址 def msg(text): json_text= { "msgtype": "text", "text": { "content": text }, "at": { "atMobiles": [ "186..." #需要@群里谁 ], "isAtAll": True #是否全部@,True为是,False为否 } } print requests.post(api_url,json.dumps(json_text),headers=headers).content if __name__ == '__main__': text = sys.argv[1] msg(text)
添加执行权限
chmod +x dingding.py
测试脚本是否可行


创建媒介类型

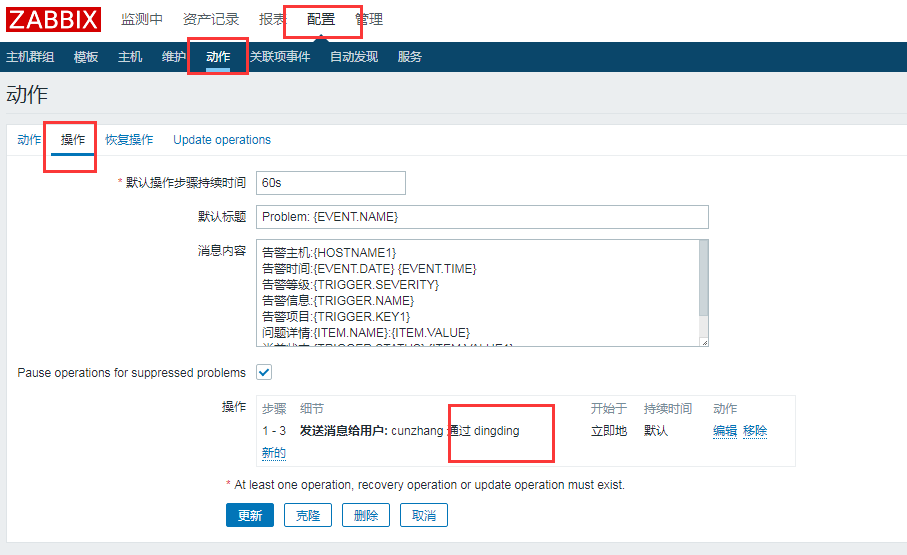
创建动作
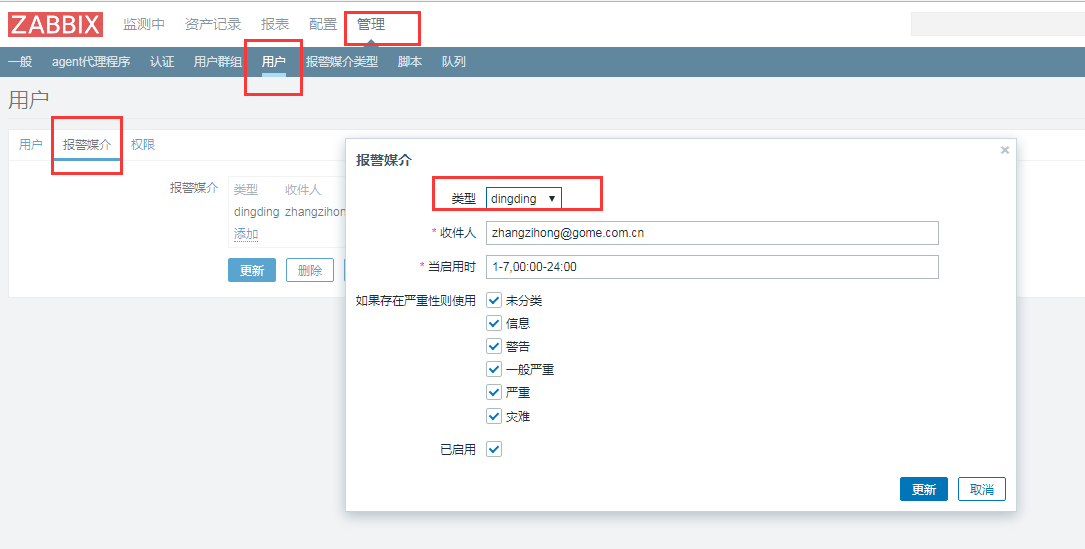
用户媒介
测试是否成功发送