1-wire总线的特点
1-wire协议是用一条数据线作为总线进行数据通信的协议。
1-wire总线有以下特点:
1. 可以组建网络,个数没有限制。
2. 使用GPIO的特性就可以,不需要专门的控制器。
3. 总线网络中只有一个主动设备,其它设备均为从设备。主设备发起通信,从设备应答。从设备不能发起通信。
4. 属于串行异步通信。
5. 通信时序严格,在操作系统中,必须在数据通信阶段阶段关闭调度(调度带来的延迟可以能有数毫秒,将破坏时序)。
6. 不同的1-wire设备,通信协议和时序很可能不一样。组建网络时,确保使用遵守相同协议和时序的设备。
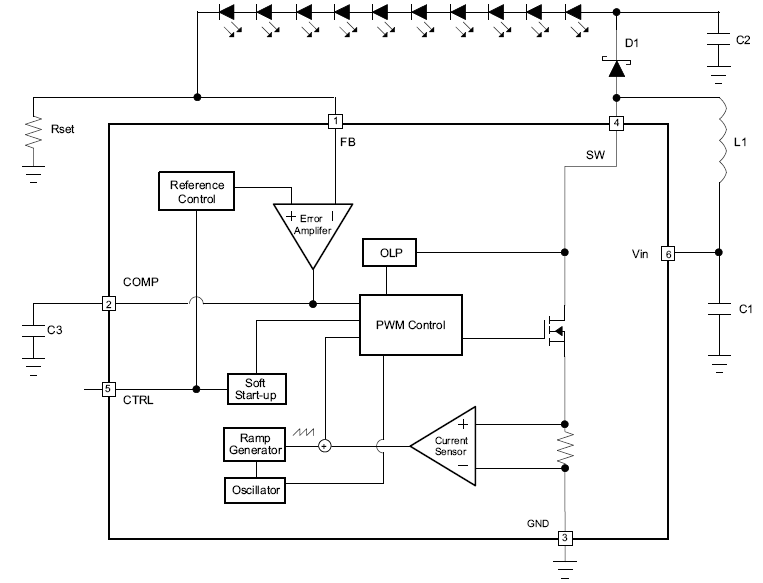
TPS6116x的功能框图
1. 从上电谈起
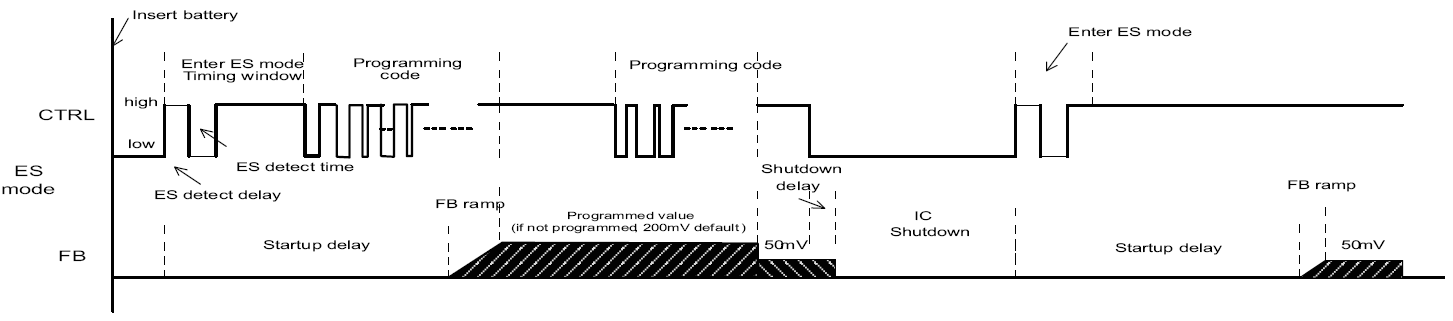
上电后,默认工作在PWM模式,参考电压为200mV. 如果要让设备工作在1-wire模式,则要按照时序要求设置CTRL。
上电的时候,如果CTRL是高电平,对是否1-wire模式的侦测被立即触发。如果CTRL不符合时序要求,则退出侦测。
任何时候,如果CTRL是低电平,且维持2.5ms以上,则设备关机。
2. 无论是PWM模式,还是1-wire模式,都是在设置参考电压(Reference Control).
FB的目标值是参考电压(Error Amplier)。FB与参考电压的误差值被输入PWM Control,以修正PWM的有效宽度。
3. Rset电阻用来调整最大亮度。参考电压的最大值为200mV,这样,如果Rset的阻值为10欧姆,那么LED的最大电流是20mA。
4. PWM的频率是600KHz.
5. 设备Shut down的时候(CTRL一直为低),没有PWM输出。Vin可以直接流向LED.所以Vin在设计上要小于LEDs的开启电压。
6. 设备从Shut down状态复位时(CTRL变高触发复位,设备开机)。开机时如果FB寄存器值(用来设置参考电压的寄存器)为0(范围0-31),则FB寄存器被设定为31(200mV)。
开机时如果FB寄存器不为0,则不会修改FB寄存器的值。Datasheet中指出,不要直接设定FB寄存器值为0,如果想关机,可以令设备Shutdown(CTRL置低2.5ms)。
7. Soft start-up控制电路控制电压一级一级往上升,以避免电流冲击。
TPS6116x的时序
在TPS6116x的Datasheet中,6.6节详细列出时序要求。
| 名字 | 含义 | 电平 | 最小值 | 最大值 | 单位 |
| tvalACKN | ACK准备时间,从设备在此区间准备ACK. TPS6116x只有在数据最高位(RFA)为1时,从设备返回ACK。并且从设备是OpenDrain输出的。 | 高 | 2 | us | |
| tACKN | ACK的有效区间。数据线被从设备拉低。 | 低 | 512 | us | |
| toff | 设备关机时间。相当于电脑的长按开机键进行强制关机。 | 低 | 2500 | us | |
| tes_det | EasyScale模式侦测的真正开始。260us超过PWM模式的最大低电平宽度(5kHz, 200us). | 低 | 260 | 2500 | us |
| tes_delay | TPS6116x从Shutdown状态退出(2.5ms后变高)时开始侦测EasyScale模式的进入。必须维持至少100us的高位。也可能一直高。 | 高 | 100 | us | |
| tes_win | EasyScale模式侦测的总体时间。TPS6116x从Shutdown状态退出(2.5ms后变高)时开始侦测EasyScale模式的进入。包括tes_delay和tes_det。 | 1000 | us | ||
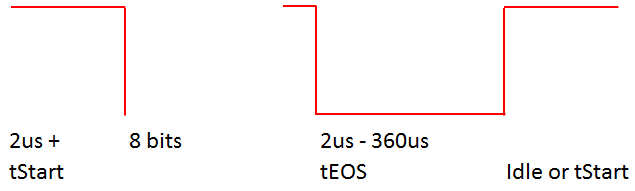
| tSTART | 字节处理的预备时间。也可以理解为字节之间的间隔。 | 高 | 2 | us | |
| tEOS | 字节的结束。相当于UART的STOP位。 | 低 | 2 | 360 | us |
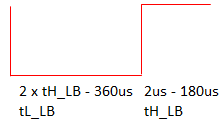
| tH_LB | 逻辑0的高电平时间 | 高 | 2 | 180 | us |
| tL_LB | 逻辑0的低电平时间 | 低 | 2 × tH_LB | 360 | us |
| tL_HB | 逻辑1的低电平时间 | 低 | 2 | 180 | us |
| tH_HB | 逻辑1的高电平时间 | 高 | 2 × tL_HB | 360 | us |
1. 上电
如果CTRL PIN引脚电平是高,进入tes_win,开始判断是进入EasyScale的1-wire模式,还是进入PWM模式。
如果CTRL PIN引脚电平是低,2.5ms之后设备shutdown,进入低耗电模式。
2. 进入EasyScale的1-wire模式。
1. 为了避免不确定的时序状态,先置CTRL PIN引脚电平为低3秒。设备进入shutdown状态。
static void tps6116_shutdown(unsigned int gpio) { gpio_set_value(gpio, 0); mdelay(3); // tps6116 shut down. }
2. 置CTRL PIN为高,进入tes_win。tes_win遵循下面的时序要求,以进入EasyScale的1-wire模式。
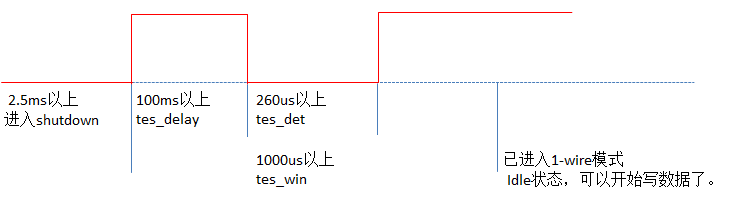
static void tps6116_reset(unsigned int gpio){ gpio_set_value(gpio, 0); mdelay(3); // tps6116 shut down. gpio_set_value(gpio, 1); // reset, FB = 200mv. start EasyScale detection window. usleep(500); // tes_delay. min 100us preempt_disable(); // avoid the possbile shutdown. let me do it over. gpio_set_value(gpio, 0); usleep(300); // tes_det, min 260us gpio_set_value(gpio, 1); preempt_enable(); usleep(500); // tes_win, min 1000us. 500 + 300 + 500 = 1300 > 1000 }
3. 发送字符1。
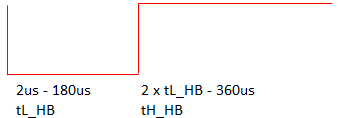
static void tps6116_send_bit_1(unsigned int gpio){ gpio_set_value(gpio, 0); udelay(20); // pull low for 20us gpio_set_value(gpio,1); udelay(80); // pull high for 80us }
4. 发送字符0。
static void tps6116_send_bit_0(unsigned int gpio){ gpio_set_value(gpio, 0); udelay(80); // pull low for 80us gpio_set_value(gpio,1); udelay(20); // pull high for 20us }
5. 发送字节。
static void tps6116_send_byte(unsigned int gpio, unsigned char value){ int i; int bit; udelay(50); // start for (i = 7; i >= 0; i--){ bit = value & (1 << i); // High bit first if (bit){ tps6116_send_bit_1(gpio); } else{ tps6116_send_bit_0(gpio); } } gpio_set_value(gpio, 0); // End of start udelay(50); gpio_set_value(gpio, 1); // idle }
6. 发送帧。
数据帧包含两个字节,第一个字节是地址0x72(固定的)。第二个地址是数据,bit[0-4]是FB寄存器值(0-31),bit[5-6]是设备地址(0),bit[7]是RFA,表示是否希望设备传回ACK。使用RFA,通信会更复杂,驱动还要改变GPIO方向,并且由于设备CTRL是OpenDrain的,主机端要加4.7K的上拉电阻。
// irq code running time is very short, assume it does not effect the timming here. // if disable irq, the performance of the system will be effected. static void tps6116_set_fb_value(unsigned int gpio, unsigned char value){ value = value & 0x1F; // RFA: 0, A1=A0=0 preempt_disable(); // let me do it over. tps6116_send_byte(gpio, 0x72); // address: 0x72 tps6116_send_byte(gpio, value); preempt_enable(); }
TPS6116x的Linux驱动的其它部分
1. 设置好平台驱动的数据结构。
static struct platform_driver tps6116_bl_driver = { .driver = { .name = "tps6116-bl", .pm = &tps6116_bl_pm_ops, .of_match_table = of_match_ptr(tps6116_bl_of_match), }, .probe = tps6116_bl_probe, .remove = tps6116_bl_remove, .shutdown = tps6116_bl_shutdown, }; module_platform_driver(tps6116_bl_driver);
2. probe的工作
1. 分配设备私有数据。
2. 从dts中获取必要的信息: default-brightness, max_brightness, gpio。
3. 初始化gpio。
4. 注册背光驱动。
5. 初始设置背光。
6. 设置平台驱动数据。 这样,从平台设备可以得到背光设备结构,从背光设备结构可以得到设备数据。这对应那些回调函数是很有必要的。
struct backlight_device *bl = platform_get_drvdata(pdev); struct tps6116_bl *tps6116_bl = bl_get_data(bl);
最快的方法是找一个相似的背光驱动,比如pwm_bl.c,看它是怎么与驱动框架交互的。
后语
看Data sheet或者看别人写的示例代码,会忽略很多细节。而在整理资料的过程当中,为了把内容细致、逻辑地呈现出来,就会反复阅读和理解手头的资料,很多细节就被挖掘出来。所以养成资料整理的习惯是很有必要的。