一、PWM概述:
PWM(Pulse Width Modulation):脉冲宽度调制技术,通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形。
PWM 的几个基本概念:
- 1) 占空比:占空比是指在一个周期内,信号处于高电平的时间占整个信号周期的百分比,方波的占空比是50%。
- 2) 调制频率:周期的倒数。
- 3) 脉冲宽度:信号处于高电平的时间。
二、nRF51822的PWM产生:
NRF51822 通过Timer、PPI 和GPIOTE 的配合实现PWM 的功能,由Timer 产生一个事件,PPI 捕获这个事件并把这个事件转化为任务传递给GPIOTE, GPIOTE 模块根据传递过来额任务执行操作。NRF51822 实现PWM 的原理框图如下图所示:
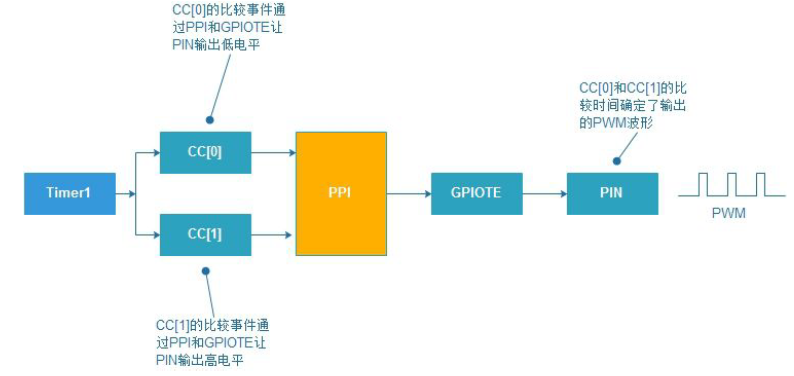
由上图可以看出,实现PWM 功能,需要使用2 个CC 通道,通过设定CC[0]和CC[1]通道的比较值,让他们在不同的时间产生比较值匹配事件,从而触发GPIOTE 模块控制管脚在设定的时间点输出高电平和低电平,这样,就可以产生不同脉冲宽度的输出信号,即PWM 输出信号。
三、代码解析:
main:
1 int main(void) 2 { 3 ret_code_t err_code; 4 5 /* 2-channel PWM, 200Hz, output on DK LED pins. */ 6 app_pwm_config_t pwm1_cfg = APP_PWM_DEFAULT_CONFIG_2CH(5000L, BSP_LED_0, BSP_LED_1);//PWM参数配置 7 8 /* Switch the polarity of the second channel. */ 9 pwm1_cfg.pin_polarity[1] = APP_PWM_POLARITY_ACTIVE_HIGH; 10 11 /* Initialize and enable PWM. */ 12 err_code = app_pwm_init(&PWM1, &pwm1_cfg, pwm_ready_callback);//PWM初始化(核心在这个里面,本次不讲) 13 APP_ERROR_CHECK(err_code); 14 app_pwm_enable(&PWM1);//使能PWM 15 16 uint32_t value; 17 while(true) 18 { 19 for (uint8_t i = 0; i < 40; ++i) 20 { 21 value = (i < 20) ? (i * 5) : (100 - (i - 20) * 5); 22 23 ready_flag = false; 24 /* Set the duty cycle - keep trying until PWM is ready... */ 25 while (app_pwm_channel_duty_set(&PWM1, 0, value) == NRF_ERROR_BUSY);//设置PWM1的0通道的值 26 27 /* ... or wait for callback. */ 28 while(!ready_flag); 29 APP_ERROR_CHECK(app_pwm_channel_duty_set(&PWM1, 1, value));//设置通道1 30 nrf_delay_ms(25); 31 } 32 } 33 34 }
注:PWM参数配置宏定义如下
1 /**@brief PWM instance default configuration (2 channels). */ 2 #define APP_PWM_DEFAULT_CONFIG_2CH(period_in_us, pin0, pin1) 3 { 4 .pins = {pin0, pin1}, 5 .pin_polarity = {APP_PWM_POLARITY_ACTIVE_LOW, APP_PWM_POLARITY_ACTIVE_LOW}, 6 .num_of_channels = 2, 7 .period_us = period_in_us 8 }
注:PWM回调函数如下
1 static volatile bool ready_flag; // A flag indicating PWM status. 2 3 void pwm_ready_callback(uint32_t pwm_id) // PWM callback function 4 { 5 ready_flag = true; 6 }
@nRF51822基础实验系列:
[nRF51822] 8、基础实验代码解析大全 · 实验11 - PPI
[nRF51822] 9、基础实验代码解析大全 · 实验12 - ADC
[nRF51822] 10、基础实验代码解析大全 · 实验15 - RTC
[nRF51822] 11、基础实验代码解析大全 · 实验16 - 内部FLASH读写
@beautifulzzzz - 物联网&普适计算实践者
e-mail:beautifulzzzz@qq.com
i-blog:blog.beautifulzzzz.com