假设激光获取的空间点坐标为Xl(x,y,z),首先我们先要将其转换到相机坐标系下:Xc=RTlcXl。RTlc为激光坐标系到相机坐标系的旋转平移矩阵,通常激光和相机安置好后,需要通过标定来确定RTlc值,标定的内容将在下几节中涉及。

接下来再将Xc投影到相机的成像平面上,熟悉相机的同学应该了解其中步骤,不熟悉的可以自行查阅相机的成像原理。
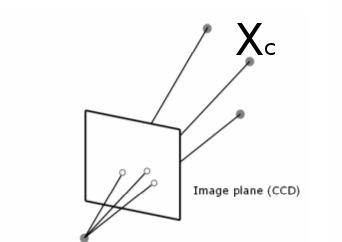
简单来说其过程可以用uv=KXc. 其中K为相机的内参,uv为图像坐标。
总的来说已知激光上的一点Xl,通过方程uv=KRTlcXl,我们就可以确定其在图像上的成像位置,从何获取这一点的彩色信息。