http://blog.csdn.net/u011279649/article/details/11059433
USB gadget driver的框架可分为三部分:UDC-core, composite.c and Android.c,其中 composite.c是核心,其他两部分都要bind 到 composit上。
1. UDC-core
结构体usb_gadget中包含指向usb_ep的link head,通过该link head,可以访问
所有的usb_ep, usb_ep中包含了具体的,最终的ops.
这些endpoint的ops是何时赋值的?
我们先看下udc的框架,它提供了一组所有usb device controller都有的属性文件,

static struct class *udc_class;
实现为class属性文件组;通过属性文件可以控制udc如: softconnect
static struct attribute *usb_udc_attrs[] = {
&dev_attr_srp.attr,
&dev_attr_soft_connect.attr,
&dev_attr_current_speed.attr,
&dev_attr_maximum_speed.attr,
&dev_attr_is_dualspeed.attr,
&dev_attr_is_otg.attr,
&dev_attr_is_a_peripheral.attr,
&dev_attr_b_hnp_enable.attr,
&dev_attr_a_hnp_support.attr,
&dev_attr_a_alt_hnp_support.attr,
NULL,
};
通过属性文件可以控制udc如: softconnect
static ssize_t usb_udc_softconn_store(struct device *dev,
struct device_attribute *attr, const char *buf, size_t n)
{
struct usb_udc *udc = container_of(dev, struct usb_udc, dev);
if (sysfs_streq(buf, "connect")) {
if (udc_is_newstyle(udc))
usb_gadget_udc_start(udc->gadget, udc->driver);
usb_gadget_connect(udc->gadget);
} else if (sysfs_streq(buf, "disconnect")) {
usb_gadget_disconnect(udc->gadget);
if (udc_is_newstyle(udc))
usb_gadget_udc_stop(udc->gadget, udc->driver);
} else {
dev_err(dev, "unsupported command '%s'
", buf);
return -EINVAL;
}
return n;
}
另外提供static LIST_HEAD(udc_list);
指向所有的通过函数usb_add_gadget_udc添加的usb_udc,
向外提供了接口函数usb_add_gadget_udc把具体的usb device controller加入到框架中。
函数usb_add_gadget_udc的参数是usb_gadget,此时endpoint的ops已经被赋
值了,可以以此为线索跟踪,就可看明白。
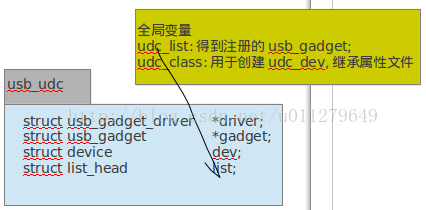
usb_gadget数据结构间的关系:
最上层是usb_udc,
crash> usb_udc
struct usb_udc {
struct usb_gadget_driver *driver;
struct usb_gadget *gadget;
struct device dev;
struct list_head list;
}
其中包含了 usb_gadget_driver and usb_gadget等
先看usb_gadget_driver,driver不是应该包含怎样操作设备的方法吗?但它的成员只是包含
setup/ suspend/resume等。
usb gadget 的操作方法都是设备本身的属性决定的和自己写的driver没什么关系。但是USB host请求设备描述符等的返回值时,
usb_gadget_driver是可以决定的。
crash> usb_gadget_driver
struct usb_gadget_driver {
char *function;
enum usb_device_speed max_speed;
void (*unbind)(struct usb_gadget *);
int (*setup)(struct usb_gadget *, const struct usb_ctrlrequest *);
void (*disconnect)(struct usb_gadget *);
void (*suspend)(struct usb_gadget *);
void (*resume)(struct usb_gadget *);
struct device_driver driver;
}
crash> usb_gadget
struct usb_gadget {
const struct usb_gadget_ops *ops;
struct usb_ep *ep0;
struct list_head ep_list;
enum usb_device_speed speed;
enum usb_device_speed max_speed;
unsigned int sg_supported : 1;
unsigned int is_otg : 1;
unsigned int is_a_peripheral : 1;
unsigned int b_hnp_enable : 1;
unsigned int a_hnp_support : 1;
unsigned int a_alt_hnp_support : 1;
const char *name;
struct device dev;
}
usb_gadget中包含属性的描述如是否具有OTG功能等,还有怎样使用usb_gadget的方法。方法包含两部分:
1】usb_gadget_ops
crash> usb_gadget_ops
struct usb_gadget_ops {
int (*get_frame)(struct usb_gadget *);
int (*wakeup)(struct usb_gadget *);
int (*set_selfpowered)(struct usb_gadget *, int);
int (*vbus_session)(struct usb_gadget *, int);
int (*vbus_draw)(struct usb_gadget *, unsigned int);
int (*pullup)(struct usb_gadget *, int);
int (*ioctl)(struct usb_gadget *, unsigned int, unsigned long);
void (*get_config_params)(struct usb_dcd_config_params *);
int (*udc_start)(struct usb_gadget *, struct usb_gadget_driver *);
int (*udc_stop)(struct usb_gadget *, struct usb_gadget_driver *);
int (*start)(struct usb_gadget_driver *, int (*)(struct usb_gadget *));
int (*stop)(struct usb_gadget_driver *);
}
2】有关endpoit的操作
crash> usb_ep
struct usb_ep {
void *driver_data;
const char *name;
const struct usb_ep_ops *ops;
struct list_head ep_list;
unsigned int maxpacket : 16;
unsigned int max_streams : 16;
unsigned int mult : 2;
unsigned int maxburst : 5;
u8 address;
const struct usb_endpoint_descriptor *desc;
const struct usb_ss_ep_comp_descriptor *comp_desc;
}
crash> usb_ep_ops
struct usb_ep_ops {
int (*enable)(struct usb_ep *, const struct usb_endpoint_descriptor *);
int (*disable)(struct usb_ep *);
struct usb_request *(*alloc_request)(struct usb_ep *, gfp_t);
void (*free_request)(struct usb_ep *, struct usb_request *);
int (*queue)(struct usb_ep *, struct usb_request *, gfp_t);
int (*dequeue)(struct usb_ep *, struct usb_request *);
int (*set_halt)(struct usb_ep *, int);
int (*set_wedge)(struct usb_ep *);
int (*fifo_status)(struct usb_ep *);
void (*fifo_flush)(struct usb_ep *);
}
2.android.c提供用户设置的功能
android_dev中**functions指向该系统能支持的所有功能,而
Listhead指向所有当前使能的功能;
android_usb_function是怎样加入到usb_configuration中的那?
usb_configuation中的成员为usb_function.
composite/function数据结构间的关系

根据用户需要的功能设置android_dev, 进而得到 usb_composite_dev
crash> android_dev
struct android_dev {
struct android_usb_function **functions;
struct list_head enabled_functions;
struct usb_composite_dev *cdev;
struct device *dev;
bool enabled;
int disable_depth;
struct mutex mutex;
bool connected;
bool sw_connected;
struct work_struct work;
}
从usb_composite_dev得到所有的 usb_configure, 由struct list_head configs管理:
crash> usb_composite_dev
struct usb_composite_dev {
struct usb_gadget *gadget;
struct usb_request *req;
unsigned int bufsiz;
struct usb_configuration *config;
unsigned int suspended : 1;
struct usb_device_descriptor desc;
struct list_head configs;
struct usb_composite_driver *driver;
u8 next_string_id;
u8 manufacturer_override;
u8 product_override;
u8 serial_override;
unsigned int deactivations;
int delayed_status;
spinlock_t lock;
}
usb_configuration使用struct list_head functions管理所有的usb_function,注意其中的
struct list_head list是为了接收usb_configuration所在链表的管理。
crash> usb_configuration
struct usb_configuration {
const char *label;
struct usb_gadget_strings **strings;
const struct usb_descriptor_header **descriptors;
void (*unbind)(struct usb_configuration *);
int (*setup)(struct usb_configuration *, const struct usb_ctrlrequest *);
u8 bConfigurationValue;
u8 iConfiguration;
u8 bmAttributes;
u8 bMaxPower;
struct usb_composite_dev *cdev;
struct list_head list;
struct list_head functions;
u8 next_interface_id;
unsigned int superspeed : 1;
unsigned int highspeed : 1;
unsigned int fullspeed : 1;
struct usb_function *interface[16];
}
struct list_head list是为了接收usb_function所在链表的管理。
crash> usb_function
struct usb_function {
const char *name;struct list_head list;
struct usb_gadget_strings **strings;
struct usb_descriptor_header **descriptors;
struct usb_descriptor_header **hs_descriptors;
struct usb_descriptor_header **ss_descriptors;
struct usb_configuration *config;
int (*bind)(struct usb_configuration *, struct usb_function *);
void (*unbind)(struct usb_configuration *, struct usb_function *);
int (*set_alt)(struct usb_function *, unsigned int, unsigned int);
int (*get_alt)(struct usb_function *, unsigned int);
void (*disable)(struct usb_function *);
int (*setup)(struct usb_function *, const struct usb_ctrlrequest *);
void (*suspend)(struct usb_function *);
void (*resume)(struct usb_function *);
int (*get_status)(struct usb_function *);
int (*func_suspend)(struct usb_function *, u8);
struct list_head list;
unsigned long endpoints[1];
}
3. composite.c
Composite框架要向外提供两类接口:
或者说提供这两点的通用性.
1]用户定义具体的功能;
2]具体的USBdevice controller

从数据结构上看:usb_composite_dev包含在上层提供具体功能的数据结构
android_dev中,usb_composite_dev包含了controller具体的usb_gadget
的成员;
usb_composite_dev中包含了指向所有usb_configuration的linkhead,而
usb_configuration中包含了指向说有usb_function的linkhead.
这里的数据结构的层次,体现了USB的描述的层次关系,注意usb_function中
并没有指向usb_ep的指针。
4.以android.c文件中init函数为线索,看usbgadget driver的初始化过程:
1.所有的usbdevice都会处理setuppacket。函数composite.c提供了一个common的
usb_gadget_driver: composite_driver,用户定义的function可能增加一些处理;
2.android.c文件中提供全局变量
提供了usb_composite_driver , usb_gadget_driver and usb_configure类型的全局变量
drivers/usb/gadget/android.c
struct usb_composite_driver
android_usb_driver = {
.name = "android_usb",
.dev = &device_desc,
.strings = dev_strings,
.unbind = android_usb_unbind,
.max_speed = USB_SPEED_HIGH,
};
static struct usb_configuration
android_config_driver = {
.label = "android",
.unbind = android_unbind_config,
.bConfigurationValue = 1,
.bmAttributes = USB_CONFIG_ATT_ONE | USB_CONFIG_ATT_SELFPOWER,
.bMaxPower = 0xFA, /* 500ma */
};
drivers/usb/gadget/composite.c
static struct usb_gadget_driver
composite_driver = {
.unbind = composite_unbind,
.setup = composite_setup,
.disconnect = composite_disconnect,
.suspend = composite_suspend,
.resume = composite_resume,
.driver = {
.owner = THIS_MODULE,
},
};
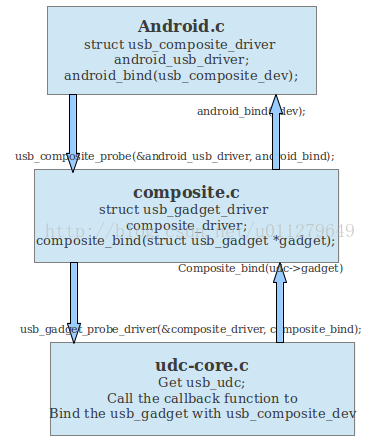
3.调用函数usb_composite_probe(&android_usb_driver,android_bind);把上层android.c
的信息usb_composite_driver类型的android_usb_driver和如何绑定 usb_composite_dev
的函数android_bind 传递到composite.c.
4.usb_composite_probe ->
usb_gadget_probe_driver(&composite_driver,composite_bind);
调用定义在udc-core.c中的函数usb_gadget_probe_driver,把定义在composite.c中的
usb_gadget_driver类型的composite_driver 和如何绑定usb_gadget的函数composite_bind传递到udc-core.c;
5.usb_gadget_probe_driver从udc_list中得到通过usb_add_gadget_udc注册的usb_udc,从
而usb_udc得到usb_gadget,进而调用composite_bind绑定 usb_gadget;
6.composite_bind(usb_gadget)
a.创建了核心usb_composite_dev;
b.调用USBgadget API (就是Endpointops and gadget ops的函数指针封装)处理EP0;
c.调用函数android_bind绑定创建并适当初始化的usb_composite_dev和上层功能配置;
7.android_bind主要调用了函数android_init_functions(android_usb_function,usb_composite_dev);
android_init_functions调用所有支持的android_usb_function的init函数,该函数处理和function具
体相关的初始化;
8.init函数到此就执行完了.
1]
android.c 提供输入参数android_usb_driver and android_bind
struct usb_composite_driver
android_usb_driver = {
.name = "android_usb",
.dev = &device_desc,
.strings = dev_strings,
.unbind = android_usb_unbind,
.max_speed = USB_SPEED_HIGH,
};
int android_bind(struct usb_composite_dev *cdev);
1.1] android.c 然后调用定义在文件 composite.c中的函数
usb_composite_probe(&android_usb_driver, android_bind);
2] composite.c会提供输入参数struct usb_gadget_driver composite_driver 和如何绑定 usb_gadget到usb_composite_dev的方法
composite_bind(struct usb_gadget *gadget)。
2.1] composite.c然后调用定义在udc-core.c文件中的函数usb_gadget_probe_driver。
3] 函数usg_gadget_probe_driver从已经注册的udc中得到对应的udc,对udc赋值,并
3.1] 调用composite.c传入的参数composite_bind绑定usb_gadget[udc->usb_gadget]到composite_dev.
4] composite.c实现了函数composite_bind,composite创建了usb_composite_dev, 然后调用了实现在 android.c文件中的函数android_bind。
这个init过程包含两部分:
上层提过输出参数和回调函数先下调用: android.c/ composite.c/ udc-core.c
然后根据回调函数从udc-core.c/composite.c/android.c向上回调。
5.到现在为止,当USBhost发送setuppacket:getconfigure descriptor,怎么上报端点描述符?
端点和接口是怎样绑定的?
我们先来看,USBfunction是怎样设置的?
上层调用sys属性文件function_store->android_enable_function添加android_usb_function
到android_dev:enable_list指向的linklist;
又是如何enableUSB function的那?
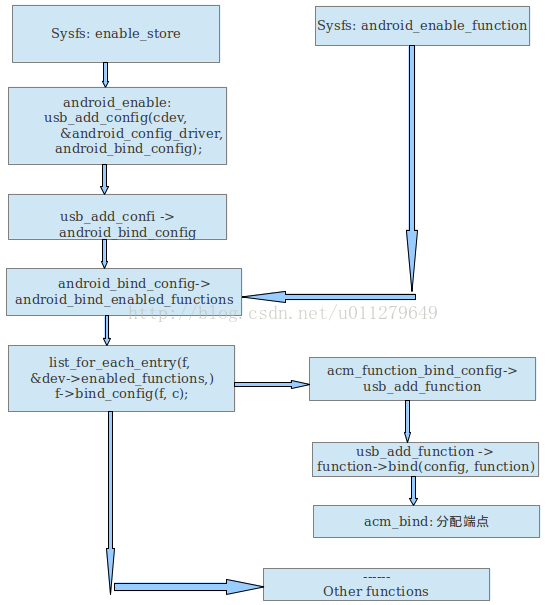
enable_store->android_enable(android_dev) ->
usb_add_config(cdev,&android_config_driver,android_bind_config);
把usb_configre加入到usb_composite_dev成员configure_listhead指向的list中,
调用函数android_bind_config绑定enabled的android_usb_function到usb_configure,
其中会调用具体android_usb_function相关的bind_config.
到此,usb_endpoint绑定到usb_interface.
/*调用函数usb_add_config,add了定义在android.c文件中的usb_configuration。又是如何创建usb_function的那?*/
/*usb_add_config调用了来自android.c的函数android_bind_config得到使用android_usb_function
*描述的功能,调用定义在具体功能的函数如acm_bind_config(struct usb_configuration *c, u8 port_num)
*最后调用函数int usb_add_function(struct usb_configuration *config,struct usb_function *function)
*关联usb_function 到usb_configuration.
*又是哪里关联usb_endpoint到usb_function的哪?
**/
/*在函数usb_add_function中关联了usb_function和usb_endpoint;
*调用了具体功能的bind函数如acm_bind
**/
一个具体的过程:
usb_add_config(cdev,&android_config_driver,android_bind_config);
->android_bind_config
->android_bind_enabled_functions
->android_usb_function: bind_config(android_usb_function,usb_configuration);
->usb_add_function(struct usb_configuration *config,struct usb_function*function)
->usb_function:(*bind)(struct usb_configuration *,structusb_function *);