线程同步
同步即协同步调,按预定的先后次序运行。
线程同步,指一个线程发出某一功能调用时,在没有得到结果之前,该调用不返回。同时其它线程为保证数据一致性,不能调用该功能。
“同步”的目的,是为了避免数据混乱,解决与时间有关的错误。实际上,不仅线程间需要同步,进程间、信号间等等都需要同步机制。
因此,所有“多个控制流,共同操作一个共享资源”的情况,都需要同步。
数据混乱原因:
1. 资源共享(独享资源则不会)
2. 调度随机(意味着数据访问会出现竞争)
3. 线程间缺乏必要的同步机制。
一、互斥量mutex
Linux中提供一把互斥锁mutex(也称之为互斥量)。
每个线程在对资源操作前都尝试先加锁,成功加锁才能操作,操作结束解锁。
资源还是共享的,线程间也还是竞争的,
但通过“锁”就将资源的访问变成互斥操作,而后与时间有关的错误也不会再产生了。
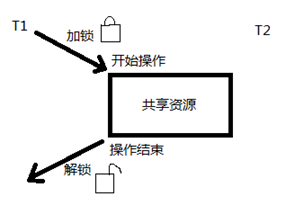
注意:同一时刻,只能有一个线程持有该锁。
主要应用函数:
pthread_mutex_init函数
pthread_mutex_destroy函数
pthread_mutex_lock函数
pthread_mutex_trylock函数
pthread_mutex_unlock函数
以上5个函数的返回值都是:成功返回0, 失败返回错误号。
pthread_mutex_t 类型,其本质是一个结构体。为简化理解,应用时可忽略其实现细节,简单当成整数看待。
pthread_mutex_t mutex; 变量mutex只有两种取值1、0。
pthread_mutex_init函数
初始化一个互斥锁(互斥量) ---> 初值可看作1
int pthread_mutex_init(pthread_mutex_t *restrict mutex, const pthread_mutexattr_t *restrict attr);
参1:传出参数,调用时应传 &mutex
参2:互斥量属性。是一个传入参数,通常传NULL,选用默认属性(线程间共享)。
- 静态初始化:如果互斥锁 mutex 是静态分配的(定义在全局,或加了static关键字修饰),可以直接使用宏进行初始化。e.g. pthead_mutex_t muetx = PTHREAD_MUTEX_INITIALIZER;
- 动态初始化:局部变量应采用动态初始化。e.g. pthread_mutex_init(&mutex, NULL)
pthread_mutex_destroy函数
销毁一个互斥锁
int pthread_mutex_destroy(pthread_mutex_t *mutex);
pthread_mutex_lock函数
加锁。可理解为将mutex--(或-1)
int pthread_mutex_lock(pthread_mutex_t *mutex);
pthread_mutex_unlock函数
解锁。可理解为将mutex ++(或+1)
int pthread_mutex_unlock(pthread_mutex_t *mutex);
pthread_mutex_trylock函数
尝试加锁
int pthread_mutex_trylock(pthread_mutex_t *mutex);
lock与unlock:
lock尝试加锁,如果加锁不成功,线程阻塞,阻塞到持有该互斥量的其他线程解锁为止。
unlock主动解锁函数,同时将阻塞在该锁上的所有线程全部唤醒,至于哪个线程先被唤醒,取决于优先级、调度。默认:先阻塞、先唤醒。
lock与trylock:
lock加锁失败会阻塞,等待锁释放。
trylock加锁失败直接返回错误号(如:EBUSY),不阻塞。
二、死锁
产生原因
1. 线程试图对同一个互斥量A加锁两次。
2. 线程1拥有A锁,请求获得B锁;线程2拥有B锁,请求获得A锁
3、振荡
避免方法
1、保证资源的获取顺序,要求每个线程获取资源的顺序一致
2、当得不到所有所需资源时,放弃已经获得的资源,等待
三、读写锁
与互斥量类似,但读写锁允许更高的并行性。其特性为:写独占,读共享,写锁优先级高。
主要应用函数:
pthread_rwlock_init函数
pthread_rwlock_destroy函数
pthread_rwlock_rdlock函数
pthread_rwlock_wrlock函数
pthread_rwlock_tryrdlock函数
pthread_rwlock_trywrlock函数
pthread_rwlock_unlock函数
以上7 个函数的返回值都是:成功返回0, 失败直接返回错误号。
pthread_rwlock_t类型 用于定义一个读写锁变量。
pthread_rwlock_t rwlock;
使用场景:适用于对数据结构读的次数远大于写
四、条件变量:
条件变量本身不是锁!但它也可以造成线程阻塞。通常与互斥锁配合使用。给多线程提供一个会合的场所。
优点:相对mutex而言,减少不必要的竞争
如果直接使用mutex,除了生产者、消费者之间需要竞争互斥量以外,消费者之间也需要竞争互斥量,但是如果汇聚(链表)中没有数据,消费者之间惊蛰互斥锁是没有意义的。有了条件变量机制以后,只有生产者完成生产,才回引起消费者之间的竞争。提高程序效率
主要应用函数:
pthread_cond_init函数
pthread_cond_destroy函数
pthread_cond_wait函数
pthread_cond_timedwait函数
pthread_cond_signal函数 唤醒(至少)一个阻塞在条件变量上的线程
pthread_cond_broadcast函数 唤醒全部阻塞在条件变量上的线程
以上6 个函数的返回值都是:成功返回0, 失败直接返回错误号。
pthread_cond_t类型 用于定义条件变量
pthread_cond_t cond;
pthread_cond_wait函数 作用:阻塞等待一个条件变量 int pthread_cond_wait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex); 函数作用: 1、阻塞等待条件变量cond(参1)满足 2、释放已掌握的互斥锁(解锁互斥量)相当于pthread_mutex_unlock(&mutex); //1.2.两步为一个原子操作。 3、当被唤醒,pthread_cond_wait函数返回时,解除阻塞并重新申请获取互斥锁pthread_mutex_lock(&mutex);
生产者消费者模型,见下一节
pthread_cond_timedwait函数 限时等待一个条件变量 int pthread_cond_timedwait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex, const struct timespec *restrict abstime); 参3:参看man sem_timedwait函数,查看struct timespec结构体。 struct timespec { time_t tv_sec; /* seconds */ 秒 long tv_nsec; /* nanosecondes*/ 纳秒 } 形参abstime:绝对时间。 如:time(NULL)返回的就是绝对时间。而alarm(1)是相对时间,相对当前时间定时1秒钟。 struct timespec t = {1, 0}; pthread_cond_timedwait (&cond, &mutex, &t); 只能定时到 1970年1月1日 00:00:01秒(早已经过去) 正确用法: time_t cur = time(NULL); 获取当前时间。 struct timespec t; 定义timespec 结构体变量t t.tv_sec = cur+1; 定时1秒 pthread_cond_timedwait (&cond, &mutex, &t); 传参 参APUE.11.6线程同步条件变量小节 在讲解setitimer函数时我们还提到另外一种时间类型: struct timeval { time_t tv_sec; /* seconds */ 秒 suseconds_t tv_usec; /* microseconds */ 微秒 };
五、信号量
可以理解为进化版的互斥锁(1-->N)
由于互斥锁的粒度比较大,若我们希望在多个线程间对某一对象的部分数据进行共享,使用互斥锁是没有办法实现的,只能将整个数据对象锁住。这样虽然达到了多线程操作共享数据时保证数据正确性的目的,但无形中导致线程的并发性下降。线程从并行执行,变成了串行执行。与直接使用单进程无异
信号量,是相对这种的一种处理方式,既能保证同步,数据不混乱,又能提高线程并发。
主要应用函数:
sem_init函数
sem_destroy函数
sem_wait函数
sem_trywait函数
sem_timedwait函数
sem_post函数
以上6 个函数的返回值都是:成功返回0, 失败返回-1,同时设置errno。(注意,它们没有pthread前缀)
sem_t类型,本质仍是结构体。但应用期间可简单看作为整数,忽略实现细节(类似于使用文件描述符)。
sem_t sem; 规定信号量sem不能 < 0。头文件 <semaphore.h>
信号量基本操作:
sem_wait: 1. 信号量大于0,则信号量-- (类比pthread_mutex_lock)
| 2. 信号量等于0,造成线程阻塞
对应
|
sem_post: 将信号量++,同时唤醒阻塞在信号量上的线程 (类比pthread_mutex_unlock)
但,由于sem_t的实现对用户隐藏,所以所谓的++、--操作只能通过函数来实现,而不能直接++、--符号。
信号量的初值,决定了占用信号量的线程的个数。
-------------------------------------------------------------------------------------------------------------------------
生产者消费者信号量模型(见下章)
-------------------------------------------------------------------------------------------------------------------------