2019-11-19
13:09:52
参考:https://github.com/riba2534/TCP-IP-NetworkNote/tree/master/ch18

18.1 理解线程的概念
18.1.1 引入线程背景
第 10 章介绍了多进程服务端的实现方法。多进程模型与 select 和 epoll 相比的确有自身的优点,但同时也有问题。如前所述,创建(复制)进程的工作本身会给操作系统带来相当沉重的负担。而且,每个进程都具有独立的内存空间,所以进程间通信的实现难度也会随之提高。换言之,多进程的缺点可概括为:
- 创建进程的过程会带来一定的开销
- 为了完成进程间数据交换,需要特殊的 IPC 技术。
但是更大的缺点是下面的:
- 每秒少则 10 次,多则千次的「上下文切换」是创建进程的最大开销
只有一个 CPU 的系统是将时间分成多个微小的块后分配给了多个进程。为了分时使用 CPU ,需要「上下文切换」的过程。「上下文切换」是指运行程序前需要将相应进程信息读入内存,如果运行进程 A 后紧接着需要运行进程 B ,就应该将进程 A 相关信息移出内存,并读入进程 B 相关信息。这就是上下文切换。但是此时进程 A 的数据将被移动到硬盘,所以上下文切换要很长时间,即使通过优化加快速度,也会存在一定的局限。

为了保持多进程的优点,同时在一定程度上克服其缺点,人们引入的线程(Thread)的概念。这是为了将进程的各种劣势降至最低程度(不是直接消除)而设立的一种「轻量级进程」。线程比进程具有如下优点:
- 线程的创建和上下文切换比进程的创建和上下文切换更快
- 线程间交换数据无需特殊技术
18.1.2 线程和进程的差异
线程是为了解决:为了得到多条代码执行流而复制整个内存区域的负担太重。
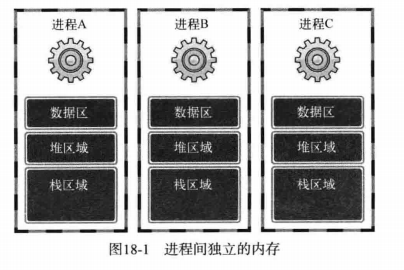
每个进程的内存空间都由保存全局变量的「数据区」、向 malloc 等函数动态分配提供空间的堆(Heap)、函数运行时间使用的栈(Stack)构成。每个进程都有独立的这种空间,多个进程的内存结构如图所示:
但如果以获得多个代码执行流为目的,则不应该像上图那样完全分离内存结构,而只需分离栈区域。通过这种方式可以获得如下优势
- 上下文切换时不需要切换数据区和堆
- 可以利用数据区和堆交换数据
实际上这就是线程。线程为了保持多条代码执行流而隔开了栈区域,因此具有如下图所示的内存结构:
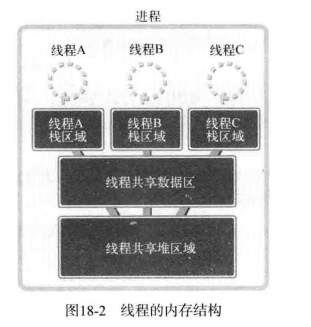
如图所示,多个线程共享数据区和堆。为了保持这种结构,线程将在进程内创建并运行。也就是说,进程和线程可以定义为如下形式:
- 进程:在操作系统构成单独执行流的单位
- 线程:在进程构成单独执行流的单位
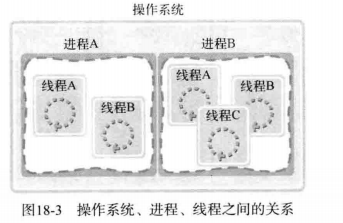
如果说进程在操作系统内部生成多个执行流,那么线程就在同一进程内部创建多条执行流。因此,操作系统、进程、线程之间的关系可以表示为下图:

18.2 线程创建及运行
可移植操作系统接口(英语:Portable Operating System Interface,缩写为POSIX)是IEEE为要在各种UNIX操作系统上运行软件,而定义API的一系列互相关联的标准的总称,其正式称呼为IEEE Std 1003,而国际标准名称为ISO/IEC 9945。此标准源于一个大约开始于1985年的项目。POSIX这个名称是由理查德·斯托曼(RMS)应IEEE的要求而提议的一个易于记忆的名称。它基本上是Portable Operating System Interface(可移植操作系统接口)的缩写,而X则表明其对Unix API的传承。
Linux基本上逐步实现了POSIX兼容,但并没有参加正式的POSIX认证。
微软的Windows NT声称部分实现了POSIX标准。
当前的POSIX主要分为四个部分:Base Definitions、System Interfaces、Shell and Utilities和Rationale。
18.2.1 线程的创建和执行流程
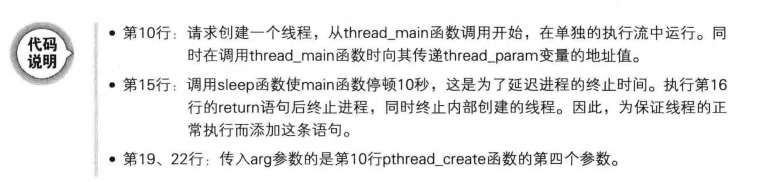
线程具有单独的执行流,因此需要单独定义线程的 main 函数,还需要请求操作系统在单独的执行流中执行该函数,完成函数功能的函数如下:
#include <pthread.h>
int pthread_create(pthread_t *restrict thread,
const pthread_attr_t *restrict attr,
void *(*start_routine)(void *),
void *restrict arg);
/*
成功时返回 0 ,失败时返回 -1
thread : 保存新创建线程 ID 的变量地址值。线程与进程相同,也需要用于区分不同线程的 ID
attr : 用于传递线程属性的参数,传递 NULL 时,创建默认属性的线程
start_routine : 相当于线程 main 函数的、在单独执行流中执行的函数地址值(函数指针)
arg : 通过第三个参数传递的调用函数时包含传递参数信息的变量地址值
*/
下面通过简单示例了解该函数功能:
thread1.c
1 #include <stdio.h> 2 #include <pthread.h> 3 void* thread_main(void *arg); 4 5 int main(int argc, char *argv[]) 6 { 7 pthread_t t_id; 8 int thread_param=5; 9 10 if(pthread_create(&t_id, NULL, thread_main, (void*)&thread_param)!=0) 11 { 12 puts("pthread_create() error"); 13 return -1; 14 }; 15 sleep(10); puts("end of main"); 16 return 0; 17 } 18 19 void* thread_main(void *arg) 20 { 21 int i; 22 int cnt=*((int*)arg); 23 for(i=0; i<cnt; i++) 24 { 25 sleep(1); puts("running thread"); 26 } 27 return NULL; 28 }


上述程序的执行如图所示:
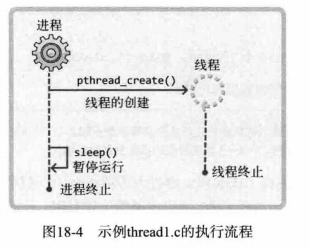
可以看出,程序在主进程没有结束时,生成的线程每隔一秒输出一次 running thread ,但是如果主进程没有等待十秒,而是直接结束,这样也会强制结束线程,不论线程有没有运行完毕。

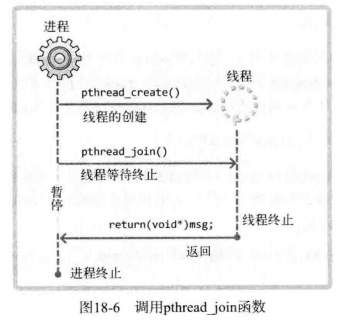
那是否意味着主进程必须每次都 sleep 来等待线程执行完毕?并不需要,可以通过以下函数解决。
#include <pthread.h>
int pthread_join(pthread_t thread, void **status);
/*
成功时返回 0 ,失败时返回 -1
thread : 该参数值 ID 的线程终止后才会从该函数返回
status : 保存线程的 main 函数返回值的指针的变量地址值
*/
作用就是调用该函数的进程(或线程)将进入等待状态,知道第一个参数为 ID 的线程终止为止。而且可以得到线程的 main 函数的返回值。下面是该函数的用法代码:
thread2.c
1 #include <stdio.h> 2 #include <stdlib.h> 3 #include <string.h> 4 #include <pthread.h> 5 void* thread_main(void *arg); 6 7 int main(int argc, char *argv[]) 8 { 9 pthread_t t_id; 10 int thread_param=5; 11 void * thr_ret; 12 13 if(pthread_create(&t_id, NULL, thread_main, (void*)&thread_param)!=0) 14 { 15 puts("pthread_create() error"); 16 return -1; 17 }; 18 19 if(pthread_join(t_id, &thr_ret)!=0) 20 { 21 puts("pthread_join() error"); 22 return -1; 23 }; 24 25 printf("Thread return message: %s ", (char*)thr_ret); 26 free(thr_ret); 27 return 0; 28 } 29 30 void* thread_main(void *arg) 31 { 32 int i; 33 int cnt=*((int*)arg); 34 char * msg=(char *)malloc(sizeof(char)*50); 35 strcpy(msg, "Hello, I'am thread~ "); 36 37 for(i=0; i<cnt; i++) 38 { 39 sleep(1); puts("running thread"); 40 } 41 return (void*)msg; 42 }

下面是该函数的执行流程图:
18.2.2 可在临界区内调用的函数
在同步的程序设计中,临界区块(Critical section)指的是一个访问共享资源(例如:共享设备或是共享存储器)的程序片段,而这些共享资源有无法同时被多个线程访问的特性。
当有线程进入临界区块时,其他线程或是进程必须等待(例如:bounded waiting 等待法),有一些同步的机制必须在临界区块的进入点与离开点实现,以确保这些共享资源是被异或的使用,例如:semaphore。
只能被单一线程访问的设备,例如:打印机。
一个最简单的实现方法就是当线程(Thread)进入临界区块时,禁止改变处理器;在uni-processor系统上,可以用“禁止中断(CLI)”来完成,避免发生系统调用(System Call)导致的上下文交换(Context switching);当离开临界区块时,处理器恢复原先的状态。
根据临界区是否引起问题,函数可以分为以下 2 类:
- 线程安全函数(Thread-safe function)
- 非线程安全函数(Thread-unsafe function)
线程安全函数被多个线程同时调用也不会发生问题。反之,非线程安全函数被同时调用时会引发问题。但这并非有关于临界区的讨论,线程安全的函数中同样可能存在临界区。只是在线程安全的函数中,同时被多个线程调用时可通过一些措施避免问题。
幸运的是,大多数标准函数都是线程安全函数。操作系统在定义非线程安全函数的同时,提供了具有相同功能的线程安全的函数。比如,第 8 章的:
struct hostent *gethostbyname(const char *hostname);
同时,也提供了同一功能的安全函数:
struct hostent *gethostbyname_r(const char *name,
struct hostent *result,
char *buffer,
int intbuflen,
int *h_errnop);
线程安全函数结尾通常是 _r 。但是使用线程安全函数会给程序员带来额外的负担,可以通过以下方法自动将 gethostbyname 函数调用改为 gethostbyname_r 函数调用。
声明头文件前定义
_REENTRANT宏。
无需特意更改源代码加,可以在编译的时候指定编译参数定义宏。
gcc -D_REENTRANT mythread.c -o mthread -lpthread
18.2.3 工作(Worker)线程模型
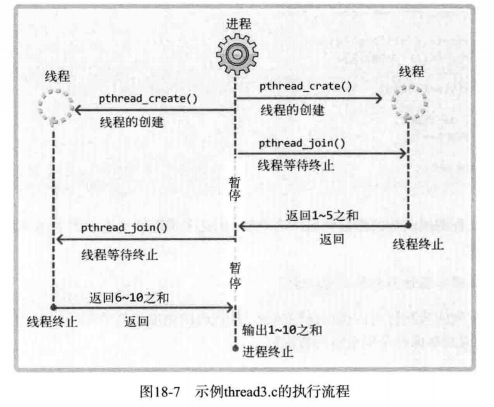
下面的示例是计算从 1 到 10 的和,但并不是通过 main 函数进行运算,而是创建两个线程,其中一个线程计算 1 到 5 的和,另一个线程计算 6 到 10 的和,main 函数只负责输出运算结果。这种方式的线程模型称为「工作线程」。显示该程序的执行流程图:
下面是代码:
thread3.c
1 #include <stdio.h> 2 #include <pthread.h> 3 void * thread_summation(void * arg); 4 5 int sum=0; 6 7 int main(int argc, char *argv[]) 8 { 9 pthread_t id_t1, id_t2; 10 int range1[]={1, 5}; 11 int range2[]={6, 10}; 12 13 pthread_create(&id_t1, NULL, thread_summation, (void *)range1); 14 pthread_create(&id_t2, NULL, thread_summation, (void *)range2); 15 16 pthread_join(id_t1, NULL); 17 pthread_join(id_t2, NULL); 18 printf("result: %d ", sum); 19 return 0; 20 } 21 22 void * thread_summation(void * arg) 23 { 24 int start=((int*)arg)[0]; 25 int end=((int*)arg)[1]; 26 27 while(start<=end) 28 { 29 sum+=start; 30 start++; 31 } 32 return NULL; 33 }

可以看出计算结果正确,两个线程都用了全局变量 sum ,证明了 2 个线程共享保存全局变量的数据区。
但是本例子本身存在问题。存在临界区相关问题,可以从下面的代码看出,下面的代码和上面的代码相似,只是增加了发生临界区错误的可能性,即使在高配置系统环境下也容易产生的错误:
thread4.c
1 #include <stdio.h> 2 #include <windows.h> 3 #include <process.h> 4 #define NUM_THREAD 100 5 6 void * thread_inc(void * arg); 7 void * thread_des(void * arg); 8 long long num=0; 9 10 int main(int argc, char *argv[]) 11 { 12 HANDLE thread_id[NUM_THREAD]; 13 int i; 14 15 printf("sizeof long long: %d ", sizeof(long long)); 16 for(i=0; i<NUM_THREAD; i++) 17 { 18 if(i%2) 19 pthread_create(&(thread_id[i]), NULL, thread_inc, NULL); 20 else 21 pthread_create(&(thread_id[i]), NULL, thread_des, NULL); 22 } 23 24 for(i=0; i<NUM_THREAD; i++) 25 pthread_join(thread_id[i], NULL); 26 27 printf("result: %lld ", num); 28 return 0; 29 } 30 31 void * thread_inc(void * arg) 32 { 33 int i; 34 for(i=0; i<50000000; i++) 35 num+=1; 36 return NULL; 37 } 38 void * thread_des(void * arg) 39 { 40 int i; 41 for(i=0; i<50000000; i++) 42 num-=1; 43 return NULL; 44 }
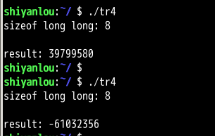
从图上可以看出,每次运行的结果竟然不一样。理论上来说,上面代码的最后结果应该是 0 。原因暂时不得而知,但是可以肯定的是,这对于线程的应用是个大问题。
18.3 线程存在的问题和临界区
下面分析 thread4.c 中产生问题的原因,并给出解决方案。
18.3.1 多个线程访问同一变量是问题
thread4.c 的问题如下:
2 个线程正在同时访问全局变量 num
任何内存空间,只要被同时访问,都有可能发生问题。
因此,线程访问变量 num 时应该阻止其他线程访问,直到线程 1 运算完成。这就是同步(Synchronization)
18.3.2 临界区位置
那么在刚才代码中的临界区位置是:
函数内同时运行多个线程时引发问题的多条语句构成的代码块
全局变量 num 不能视为临界区,因为他不是引起问题的语句,只是一个内存区域的声明。下面是刚才代码的两个 main 函数
void *thread_inc(void *arg)
{
int i;
for (i = 0; i < 50000000; i++)
num += 1;//临界区
return NULL;
}
void *thread_des(void *arg)
{
int i;
for (i = 0; i < 50000000; i++)
num -= 1;//临界区
return NULL;
}
由上述代码可知,临界区并非 num 本身,而是访问 num 的两条语句,这两条语句可能由多个线程同时运行,也是引起这个问题的直接原因。产生问题的原因可以分为以下三种情况:
- 2 个线程同时执行 thread_inc 函数
- 2 个线程同时执行 thread_des 函数
- 2 个线程分别执行 thread_inc 和 thread_des 函数
比如发生以下情况:
线程 1 执行 thread_inc 的 num+=1 语句的同时,线程 2 执行 thread_des 函数的 num-=1 语句
也就是说,两条不同的语句由不同的线程执行时,也有可能构成临界区。前提是这 2 条语句访问同一内存空间。
18.4 线程同步
前面讨论了线程中存在的问题,下面就是解决方法,线程同步。
18.4.1 同步的两面性
线程同步用于解决线程访问顺序引发的问题。需要同步的情况可以从如下两方面考虑。
- 同时访问同一内存空间时发生的情况
- 需要指定访问同一内存空间的线程顺序的情况
情况一之前已经解释过,下面讨论情况二。这是「控制线程执行的顺序」的相关内容。假设有 A B 两个线程,线程 A 负责向指定的内存空间内写入数据,线程 B 负责取走该数据。所以这是有顺序的,不按照顺序就可能发生问题。所以这种也需要进行同步。
18.4.2 互斥量
互斥锁(英语:英语:Mutual exclusion,缩写 Mutex)是一种用于多线程编程中,防止两条线程同时对同一公共资源(比如全域变量)进行读写的机制。该目的通过将代码切片成一个一个的临界区域(critical section)达成。临界区域指的是一块对公共资源进行访问的代码,并非一种机制或是算法。一个程序、进程、线程可以拥有多个临界区域,但是并不一定会应用互斥锁。
通俗的说就互斥量就是一把优秀的锁,当临界区被占据的时候就上锁,等占用完毕然后再放开。
下面是互斥量的创建及销毁函数。
#include <pthread.h>
int pthread_mutex_init(pthread_mutex_t *mutex,
const pthread_mutexattr_t *attr);
int pthread_mutex_destroy(pthread_mutex_t *mutex);
/*
成功时返回 0,失败时返回其他值
mutex : 创建互斥量时传递保存互斥量的变量地址值,销毁时传递需要销毁的互斥量地址
attr : 传递即将创建的互斥量属性,没有特别需要指定的属性时传递 NULL
*/
从上述函数声明中可以看出,为了创建相当于锁系统的互斥量,需要声明如下 pthread_mutex_t 型变量:
pthread_mutex_t mutex
该变量的地址值传递给 pthread_mutex_init 函数,用来保存操作系统创建的互斥量(锁系统)。调用 pthread_mutex_destroy 函数时同样需要该信息。如果不需要配置特殊的互斥量属性,则向第二个参数传递 NULL 时,可以利用 PTHREAD_MUTEX_INITIALIZER 进行如下声明:
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
推荐尽可能的使用 pthread_mutex_init 函数进行初始化,因为通过宏进行初始化时很难发现发生的错误。
下面是利用互斥量锁住或释放临界区时使用的函数。
#include <pthread.h>
int pthread_mutex_lock(pthread_mutex_t *mutex);
int pthread_mutex_unlock(pthread_mutex_t *mutex);
/*
成功时返回 0 ,失败时返回其他值
*/
函数本身含有 lock unlock 等词汇,很容易理解其含义。进入临界区前调用的函数就是 pthread_mutex_lock 。调用该函数时,发现有其他线程已经进入临界区,则 pthread_mutex_lock 函数不会返回,直到里面的线程调用 pthread_mutex_unlock 函数退出临界区位置。也就是说,其他线程让出临界区之前,当前线程一直处于阻塞状态。接下来整理一下代码的编写方式:
pthread_mutex_lock(&mutex);
//临界区开始
//...
//临界区结束
pthread_mutex_unlock(&mutex);
简言之,就是利用 lock 和 unlock 函数围住临界区的两端。此时互斥量相当于一把锁,阻止多个线程同时访问,还有一点要注意,线程退出临界区时,如果忘了调用 pthread_mutex_unlock 函数,那么其他为了进入临界区而调用 pthread_mutex_lock 的函数无法摆脱阻塞状态。这种情况称为「死锁」。需要格外注意,下面是利用互斥量解决示例 thread4.c 中遇到的问题代码:
mutex.c
1 #include <stdio.h> 2 #include <unistd.h> 3 #include <stdlib.h> 4 #include <pthread.h> 5 #define NUM_THREAD 100 6 7 void * thread_inc(void * arg); 8 void * thread_des(void * arg); 9 10 long long num=0; 11 pthread_mutex_t mutex; 12 13 int main(int argc, char *argv[]) 14 { 15 pthread_t thread_id[NUM_THREAD]; 16 int i; 17 18 pthread_mutex_init(&mutex, NULL); 19 20 for(i=0; i<NUM_THREAD; i++) 21 { 22 if(i%2) 23 pthread_create(&(thread_id[i]), NULL, thread_inc, NULL); 24 else 25 pthread_create(&(thread_id[i]), NULL, thread_des, NULL); 26 } 27 28 for(i=0; i<NUM_THREAD; i++) 29 pthread_join(thread_id[i], NULL); 30 31 printf("result: %lld ", num); 32 pthread_mutex_destroy(&mutex); 33 return 0; 34 } 35 36 void * thread_inc(void * arg) 37 { 38 int i; 39 pthread_mutex_lock(&mutex); 40 for(i=0; i<50000000; i++) 41 num+=1; 42 pthread_mutex_unlock(&mutex); 43 return NULL; 44 } 45 void * thread_des(void * arg) 46 { 47 int i; 48 for(i=0; i<50000000; i++) 49 { 50 pthread_mutex_lock(&mutex); 51 num-=1; 52 pthread_mutex_unlock(&mutex); 53 } 54 return NULL; 55 } 56 57 /* 58 swyoon@com:~/tcpip$ gcc mutex.c -D_REENTRANT -o mutex -lpthread 59 swyoon@com:~/tcpip$ ./mutex 60 result: 0 61 62 */

得出结果花的时间很长!
从运行结果可以看出,通过互斥量机制得出了正确的运行结果。

在代码中:
void *thread_inc(void *arg)
{
int i;
pthread_mutex_lock(&mutex); //上锁
for (i = 0; i < 50000000; i++)
num += 1;
pthread_mutex_unlock(&mutex); //解锁
return NULL;
}
以上代码的临界区划分范围较大,但这是考虑如下优点所做的决定:
最大限度减少互斥量 lock unlock 函数的调用次数

18.4.3 信号量
信号量(英语:Semaphore)又称为信号标,是一个同步对象,用于保持在0至指定最大值之间的一个计数值。当线程完成一次对该semaphore对象的等待(wait)时,该计数值减一;当线程完成一次对semaphore对象的释放(release)时,计数值加一。当计数值为0,则线程等待该semaphore对象不再能成功直至该semaphore对象变成signaled状态。semaphore对象的计数值大于0,为signaled状态;计数值等于0,为nonsignaled状态.
semaphore对象适用于控制一个仅支持有限个用户的共享资源,是一种不需要使用忙碌等待(busy waiting)的方法。
信号量的概念是由荷兰计算机科学家艾兹赫尔·戴克斯特拉(Edsger W. Dijkstra)发明的,广泛的应用于不同的操作系统中。在系统中,给予每一个进程一个信号量,代表每个进程当前的状态,未得到控制权的进程会在特定地方被强迫停下来,等待可以继续进行的信号到来。如果信号量是一个任意的整数,通常被称为计数信号量(Counting semaphore),或一般信号量(general semaphore);如果信号量只有二进制的0或1,称为二进制信号量(binary semaphore)。在linux系统中,二进制信号量(binary semaphore)又称互斥锁(Mutex)。
下面介绍信号量,在互斥量的基础上,很容易理解信号量。此处只涉及利用「二进制信号量」(只用 0 和 1)完成「控制线程顺序」为中心的同步方法。下面是信号量的创建及销毁方法:
#include <semaphore.h>
int sem_init(sem_t *sem, int pshared, unsigned int value);
int sem_destroy(sem_t *sem);
/*
成功时返回 0 ,失败时返回其他值
sem : 创建信号量时保存信号量的变量地址值,销毁时传递需要销毁的信号量变量地址值
pshared : 传递其他值时,创建可由多个继承共享的信号量;传递 0 时,创建只允许 1 个进程内部使用的信号量。需要完成同一进程的线程同步,故为0
value : 指定创建信号量的初始值
*/
上述的 shared 参数超出了我们的关注范围,故默认向其传递为 0 。下面是信号量中相当于互斥量 lock unlock 的函数。
#include <semaphore.h>
int sem_post(sem_t *sem);
int sem_wait(sem_t *sem);
/*
成功时返回 0 ,失败时返回其他值
sem : 传递保存信号量读取值的变量地址值,传递给 sem_post 的信号量增1,传递给 sem_wait 时信号量减一
*/
调用 sem_init 函数时,操作系统将创建信号量对象,此对象中记录这「信号量值」(Semaphore Value)整数。该值在调用 sem_post 函数时增加 1 ,调用 wait_wait 函数时减一。但信号量的值不能小于 0 ,因此,在信号量为 0 的情况下调用 sem_wait 函数时,调用的线程将进入阻塞状态(因为函数未返回)。当然,此时如果有其他线程调用 sem_post 函数,信号量的值将变为 1 ,而原本阻塞的线程可以将该信号重新减为 0 并跳出阻塞状态。实际上就是通过这种特性完成临界区的同步操作,可以通过如下形式同步临界区(假设信号量的初始值为 1)
sem_wait(&sem);//信号量变为0...
// 临界区的开始
//...
//临界区的结束
sem_post(&sem);//信号量变为1...
上述代码结构中,调用 sem_wait 函数进入临界区的线程在调用 sem_post 函数前不允许其他线程进入临界区。信号量的值在 0 和 1 之间跳转,因此,具有这种特性的机制称为「二进制信号量」。接下来的代码是信号量机制的代码。下面代码并非是同时访问的同步,而是关于控制访问顺序的同步,该场景为:
线程 A 从用户输入得到值后存入全局变量 num ,此时线程 B 将取走该值并累加。该过程一共进行 5 次,完成后输出总和并退出程序。
下面是代码:
semaphore.c
1 #include <stdio.h> 2 #include <pthread.h> 3 #include <semaphore.h> 4 5 void * read(void * arg); 6 void * accu(void * arg); 7 static sem_t sem_one; 8 static sem_t sem_two; 9 static int num; 10 11 int main(int argc, char *argv[]) 12 { 13 pthread_t id_t1, id_t2; 14 sem_init(&sem_one, 0, 0); 15 sem_init(&sem_two, 0, 1); 16 17 pthread_create(&id_t1, NULL, read, NULL); 18 pthread_create(&id_t2, NULL, accu, NULL); 19 20 pthread_join(id_t1, NULL); 21 pthread_join(id_t2, NULL); 22 23 sem_destroy(&sem_one); 24 sem_destroy(&sem_two); 25 return 0; 26 } 27 28 void * read(void * arg) 29 { 30 int i; 31 for(i=0; i<5; i++) 32 { 33 fputs("Input num: ", stdout); 34 35 sem_wait(&sem_two); 36 scanf("%d", &num); 37 sem_post(&sem_one); 38 } 39 return NULL; 40 } 41 void * accu(void * arg) 42 { 43 int sum=0, i; 44 for(i=0; i<5; i++) 45 { 46 sem_wait(&sem_one); 47 sum+=num; 48 sem_post(&sem_two); 49 } 50 printf("Result: %d ", sum); 51 return NULL; 52 }
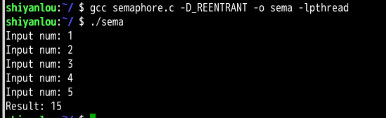
从上述代码可以看出,设置了两个信号量 one 的初始值为 0 ,two 的初始值为 1,然后在调用函数的时候,「读」的前提是 two 可以减一,如果不能减一就会阻塞在这里,一直等到「计算」操作完毕后,给 two 加一,然后就可以继续执行下一句输入。对于「计算」函数,也一样。
18.5 线程的销毁和多线程并发服务器端的实现
先介绍线程的销毁,然后再介绍多线程服务端
18.5.1 销毁线程的 3 种方法
Linux 的线程并不是在首次调用的线程 main 函数返回时自动销毁,所以利用如下方法之一加以明确。否则由线程创建的内存空间将一直存在。
- 调用 pthread_join 函数
- 调用 pthread_detach 函数
之前调用过 pthread_join 函数。调用该函数时,不仅会等待线程终止,还会引导线程销毁。但该函数的问题是,线程终止前,调用该函数的线程将进入阻塞状态。因此,通过如下函数调用引导线程销毁。
#include <pthread.h>
int pthread_detach(pthread_t th);
/*
成功时返回 0 ,失败时返回其他值
thread : 终止的同时需要销毁的线程 ID
*/
调用上述函数不会引起线程终止或进入阻塞状态,可以通过该函数引导销毁线程创建的内存空间。调用该函数后不能再针对相应线程调用 pthread_join 函数。
18.5.2 多线程并发服务器端的实现
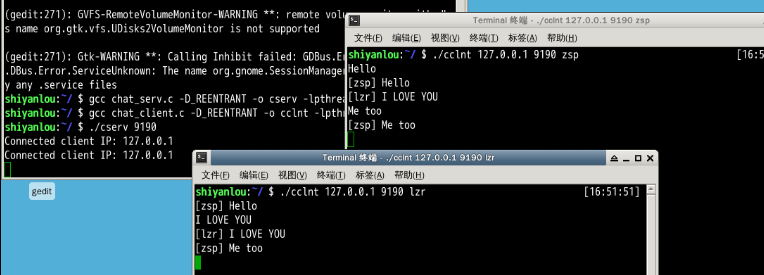
下面是多个客户端之间可以交换信息的简单聊天程序。
chat_server.c
1 #include <stdio.h> 2 #include <stdlib.h> 3 #include <unistd.h> 4 #include <string.h> 5 #include <arpa/inet.h> 6 #include <sys/socket.h> 7 #include <netinet/in.h> 8 #include <pthread.h> 9 10 #define BUF_SIZE 100 11 #define MAX_CLNT 256 12 13 void * handle_clnt(void * arg); 14 void send_msg(char * msg, int len); 15 void error_handling(char * msg); 16 17 int clnt_cnt=0; 18 int clnt_socks[MAX_CLNT]; 19 pthread_mutex_t mutx; 20 21 int main(int argc, char *argv[]) 22 { 23 int serv_sock, clnt_sock; 24 struct sockaddr_in serv_adr, clnt_adr; 25 int clnt_adr_sz; 26 pthread_t t_id; 27 if(argc!=2) { 28 printf("Usage : %s <port> ", argv[0]); 29 exit(1); 30 } 31 32 pthread_mutex_init(&mutx, NULL); 33 serv_sock=socket(PF_INET, SOCK_STREAM, 0); 34 35 memset(&serv_adr, 0, sizeof(serv_adr)); 36 serv_adr.sin_family=AF_INET; 37 serv_adr.sin_addr.s_addr=htonl(INADDR_ANY); 38 serv_adr.sin_port=htons(atoi(argv[1])); 39 40 if(bind(serv_sock, (struct sockaddr*) &serv_adr, sizeof(serv_adr))==-1) 41 error_handling("bind() error"); 42 if(listen(serv_sock, 5)==-1) 43 error_handling("listen() error"); 44 45 while(1) 46 { 47 clnt_adr_sz=sizeof(clnt_adr); 48 clnt_sock=accept(serv_sock, (struct sockaddr*)&clnt_adr,&clnt_adr_sz); 49 50 pthread_mutex_lock(&mutx); 51 clnt_socks[clnt_cnt++]=clnt_sock; 52 pthread_mutex_unlock(&mutx); 53 54 pthread_create(&t_id, NULL, handle_clnt, (void*)&clnt_sock); 55 pthread_detach(t_id); 56 printf("Connected client IP: %s ", inet_ntoa(clnt_adr.sin_addr)); 57 } 58 close(serv_sock); 59 return 0; 60 } 61 62 void * handle_clnt(void * arg) 63 { 64 int clnt_sock=*((int*)arg); 65 int str_len=0, i; 66 char msg[BUF_SIZE]; 67 68 while((str_len=read(clnt_sock, msg, sizeof(msg)))!=0) 69 send_msg(msg, str_len); 70 71 pthread_mutex_lock(&mutx); 72 for(i=0; i<clnt_cnt; i++) // remove disconnected client 73 { 74 if(clnt_sock==clnt_socks[i]) 75 { 76 while(i++<clnt_cnt-1) 77 clnt_socks[i]=clnt_socks[i+1]; 78 break; 79 } 80 } 81 clnt_cnt--; 82 pthread_mutex_unlock(&mutx); 83 close(clnt_sock); 84 return NULL; 85 } 86 void send_msg(char * msg, int len) // send to all 87 { 88 int i; 89 pthread_mutex_lock(&mutx); 90 for(i=0; i<clnt_cnt; i++) 91 write(clnt_socks[i], msg, len); 92 pthread_mutex_unlock(&mutx); 93 } 94 void error_handling(char * msg) 95 { 96 fputs(msg, stderr); 97 fputc(' ', stderr); 98 exit(1); 99 }
上面的服务端示例中,需要掌握临界区的构成,访问全局变量 clnt_cnt 和数组 clnt_socks 的代码将构成临界区,添加和删除客户端时,变量 clnt_cnt 和数组 clnt_socks 将同时发生变化。因此下列情形会导致数据不一致,从而引发错误:
- 线程 A 从数组 clnt_socks 中删除套接字信息,同时线程 B 读取 clnt_cnt 变量
- 线程 A 读取变量 clnt_cnt ,同时线程 B 将套接字信息添加到 clnt_socks 数组
chat_clnt.c
1 #include <stdio.h> 2 #include <stdlib.h> 3 #include <unistd.h> 4 #include <string.h> 5 #include <arpa/inet.h> 6 #include <sys/socket.h> 7 #include <pthread.h> 8 9 #define BUF_SIZE 100 10 #define NAME_SIZE 20 11 12 void * send_msg(void * arg); 13 void * recv_msg(void * arg); 14 void error_handling(char * msg); 15 16 char name[NAME_SIZE]="[DEFAULT]"; 17 char msg[BUF_SIZE]; 18 19 int main(int argc, char *argv[]) 20 { 21 int sock; 22 struct sockaddr_in serv_addr; 23 pthread_t snd_thread, rcv_thread; 24 void * thread_return; 25 if(argc!=4) { 26 printf("Usage : %s <IP> <port> <name> ", argv[0]); 27 exit(1); 28 } 29 30 sprintf(name, "[%s]", argv[3]); 31 sock=socket(PF_INET, SOCK_STREAM, 0); 32 33 memset(&serv_addr, 0, sizeof(serv_addr)); 34 serv_addr.sin_family=AF_INET; 35 serv_addr.sin_addr.s_addr=inet_addr(argv[1]); 36 serv_addr.sin_port=htons(atoi(argv[2])); 37 38 if(connect(sock, (struct sockaddr*)&serv_addr, sizeof(serv_addr))==-1) 39 error_handling("connect() error"); 40 41 pthread_create(&snd_thread, NULL, send_msg, (void*)&sock); 42 pthread_create(&rcv_thread, NULL, recv_msg, (void*)&sock); 43 pthread_join(snd_thread, &thread_return); 44 pthread_join(rcv_thread, &thread_return); 45 close(sock); 46 return 0; 47 } 48 49 void * send_msg(void * arg) // send thread main 50 { 51 int sock=*((int*)arg); 52 char name_msg[NAME_SIZE+BUF_SIZE]; 53 while(1) 54 { 55 fgets(msg, BUF_SIZE, stdin); 56 if(!strcmp(msg,"q ")||!strcmp(msg,"Q ")) 57 { 58 close(sock); 59 exit(0); 60 } 61 sprintf(name_msg,"%s %s", name, msg); 62 write(sock, name_msg, strlen(name_msg)); 63 } 64 return NULL; 65 } 66 67 void * recv_msg(void * arg) // read thread main 68 { 69 int sock=*((int*)arg); 70 char name_msg[NAME_SIZE+BUF_SIZE]; 71 int str_len; 72 while(1) 73 { 74 str_len=read(sock, name_msg, NAME_SIZE+BUF_SIZE-1); 75 if(str_len==-1) 76 return (void*)-1; 77 name_msg[str_len]=0; 78 fputs(name_msg, stdout); 79 } 80 return NULL; 81 } 82 83 void error_handling(char *msg) 84 { 85 fputs(msg, stderr); 86 fputc(' ', stderr); 87 exit(1); 88 }
18.6 习题
以下答案仅代表本人个人观点,可能不是正确答案。
-
单 CPU 系统中如何同时执行多个进程?请解释该过程中发生的上下文切换。
答:系统将 CPU 时间分成多个微笑的块后分配给了多个进程。为了分时使用 CPU ,需要「上下文切换」过程。运行程序前需要将相应进程信息读入内存,如果运行进程 A 后需要紧接着运行进程 B ,就应该将进程 A 相关今夕移出内存,并读入进程 B 的信息。这就是上下文切换
-
为何线程的上下文切换速度相对更快?线程间数据交换为何不需要类似 IPC 特别技术。
答:线程上下文切换过程不需要切换数据区和堆。可以利用数据区和堆交换数据。
-
请从执行流角度说明进程和线程的区别。
答:进程:在操作系统构成单独执行流的单位。线程:在进程内部构成单独执行流的单位。线程为了保持多条代码执行流而隔开了栈区域。
-
下面关于临界区的说法错误的是?
答:下面加粗的选项为说法正确。(全错)
- 临界区是多个线程同时访问时发生问题的区域
- 线程安全的函数中不存在临界区,即便多个线程同时调用也不会发生问题
- 1 个临界区只能由 1 个代码块,而非多个代码块构成。换言之,线程 A 执行的代码块 A 和线程 B 执行的代码块 B 之间绝对不会构成临界区。
- 临界区由访问全局变量的代码构成。其他变量中不会发生问题。
-
下列关于线程同步的说法错误的是?
答:下面加粗的选项为说法正确。
- 线程同步就是限制访问临界区
- 线程同步也具有控制线程执行顺序的含义
- 互斥量和信号量是典型的同步技术
- 线程同步是代替进程 IPC 的技术。
-
请说明完全销毁 Linux 线程的 2 种办法
答:①调用 pthread_join 函数②调用 pthread_detach 函数。第一个会阻塞调用的线程,而第二个不阻塞。都可以引导线程销毁。