1.1 802.11n标准发展历程
IEEE 802.11工作组意识到支持高吞吐将是WLAN技术发展历程的关键点,基于IEEE HTSG (High Throughput Study Group)前期的技术工作,于2003年成立了Task Group n (TGn)。n表示Next Generation,核心内容就是通过物理层和MAC层的优化来充分提高WLAN技术的吞吐。由于802.11n涉及了大量的复杂技术,标准过程中又涉及了大量的设备厂家,所以整个标准制定过程历时漫长,预计2010年末才可能会成为标准。相关设备厂家早已无法耐心等待这么漫长的标准化周期,纷纷提前发布了各自的11n产品(pre-11n)。为了确保这些产品的互通性,WiFi联盟基于IEEE 2007年发布的802.11n草案的2.0版本制定了11n产品认证规范,以帮助11n技术能够快速产业化。
1.2 技术概述
802.11n主要是结合物理层和MAC层的优化来充分提高WLAN技术的吞吐。主要的物理层技术涉及了MIMO、MIMO-OFDM、40MHz、Short GI等技术,从而将物理层吞吐提高到600Mbps。如果仅仅提高物理层的速率,而没有对空口访问等MAC协议层的优化,802.11n的物理层优化将无从发挥。就好比即使建了很宽的马路,但是车流的调度管理如果跟不上,仍然会出现拥堵和低效。所以802.11n对MAC采用了Block确认、帧聚合等技术,大大提高MAC层的效率。
802.11n对用户应用的另一个重要收益是无线覆盖的改善。由于采用了多天线技术,无线信号(对应同一条空间流)将通过多条路径从发射端到接收端,从而提供了分集效应。在接收端采用一定方法对多个天线收到信号进行处理,就可以明显改善接收端的SNR,即使在接受端较远时,也能获得较好的信号质量,从而间接提高了信号的覆盖范围。其典型的技术包括了MRC等。

除了吞吐和覆盖的改善,11n技术还有一个重要的功能就是要兼容传统的802.11 a/b/g,以保护用户已有的投资。
接下来对这些相关的关键技术进行逐一介绍。
2. 物理层关键技术
2.1 MIMO
MIMO是802.11n物理层的核心,指的是一个系统采用多个天线进行无线信号的收发。它是当今无线最热门的技术,无论是3G、IEEE 802.16e WIMAX,还是802.11n,都把MIMO列入射频的关键技术。

图1 MIMO架构
MIMO主要有如下的典型应用,包括:
1) 提高吞吐
通过多条通道,并发传递多条空间流,可以成倍提高系统吞吐。
2) 提高无线链路的健壮性和改善SNR
通过多条通道,无线信号通过多条路径从发射端到达接收端多个接收天线。由于经过多条路径传播,每条路径一般不会同时衰减严重,采用某种算法把这些多个信号进行综合计算,可以改善接收端的SNR。需要注意的是,这里是同一条流在多个路径上传递了多份,并不能够提高吞吐。在MRC部分将有更多说明。
2.2 SDM
当基于MIMO同时传递多条独立空间流(spatial streams),如下图中的空间流X1,X2,时,将成倍地提高系统的吞吐。

图2 通过MIMO传递多条空间流
MIMO系统支持空间流的数量取决于发送天线和接收天线的最小值。如发送天线数量为3,而接收天线数量为2,则支持的空间流为2。MIMO/SDM系统一般用“发射天线数量×接收天线数量”表示。如上图为2*2 MIMO/SDM系统。显然,增加天线可以提高MIMO支持的空间流数。但是综合成本、实效等多方面因素,目前业界的WLAN AP都普遍采用3×3的模式。
MIMO/SDM是在发射端和接收端之间,通过存在的多条路径(通道)来同时传播多条流。有意思的事情出现了:一直以来,无线技术(如OFMD)总是企图克服多径效应的影响,而MIMO恰恰是在利用多径来传输数据。

图3 MIMO利用多径传输数据
2.3 MIMO-OFDM
在室内等典型应用环境下,由于多径效应的影响,信号在接收侧很容易发生(ISI),从而导致高误码率。OFDM调制技术是将一个物理信道划分为多个子载体(sub-carrier),将高速率的数据流调制成多个较低速率的子数据流,通过这些子载体进行通讯,从而减少ISI机会,提高物理层吞吐。
OFDM在802.11a/g时代已经成熟使用,到了802.11n时代,它将MIMO支持的子载体从52个提高到56个。需要注意的是,无论802.11a/g,还是802.11n,它们都使用了4个子载体作为pilot子载体,而这些子载体并不用于数据的传递。所以802.11n MIMO将物理速率从传统的54Mbps提高到了58.5 Mbps(即54*52/48)。
2.4 FEC (Forward Error Correction)
按照无线通信的基本原理,为了使信息适合在无线信道这样不可靠的媒介中传递,发射端将把信息进行编码并携带冗余信息,以提高系统的纠错能力,使接收端能够恢复原始信息。802.11n所采用的QAM-64的编码机制可以将编码率(有效信息和整个编码的比率)从3/4 提高到5/6。所以,对于一条空间流,在MIMO-OFDM基础之上,物理速率从58.5提高到了65Mbps(即58.5乘5/6除以3/4)。
2.5 Short Guard Interval (GI)
由于多径效应的影响,信息符号(Information Symbol)将通过多条路径传递,可能会发生彼此碰撞,导致ISI干扰。为此,802.11a/g标准要求在发送信息符号时,必须保证在信息符号之间存在800 ns的时间间隔,这个间隔被称为Guard Interval (GI)。802.11n仍然使用缺省使用800 ns GI。当多径效应不是很严重时,用户可以将该间隔配置为400,对于一条空间流,可以将吞吐提高近10%,即从65Mbps提高到72.2 Mbps。对于多径效应较明显的环境,不建议使用Short Guard Interval (GI)。

2.6 40MHz绑定技术
这个技术最为直观:对于无线技术,提高所用频谱的宽度,可以最为直接地提高吞吐。就好比是马路变宽了,车辆的通行能力自然提高。传统802.11a/g使用的频宽是20MHz,而802.11n支持将相邻两个频宽绑定为40MHz来使用,所以可以最直接地提高吞吐。

需要注意的是:对于一条空间流,并不是仅仅将吞吐从72.2 Mbps提高到144.4(即72.2×2 )Mbps。对于20MHz频宽,为了减少相邻信道的干扰,在其两侧预留了一小部分的带宽边界。而通过40MHz绑定技术,这些预留的带宽也可以用来通讯,可以将子载体从104(52×2)提高到108。按照72.2*2*108/104进行计算,所得到的吞吐能力达到了150Mbps。
2.7 MCS (Modulation Coding Scheme)
在802.11a/b/g时代,配置AP工作的速率非常简单,只要指定特定radio类型(802.11a/b/g)所使用的速率集,速率范围从1Mbps到54Mbps,一共有12种可能的物理速率。
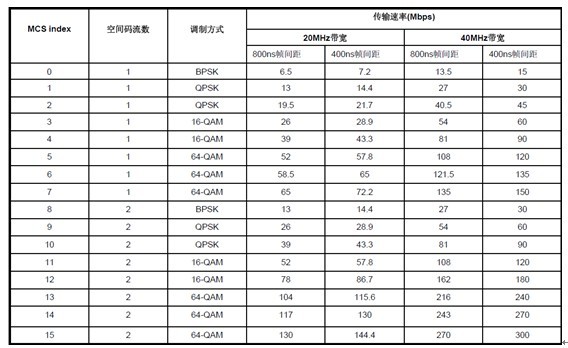
到了802.11n时代,由于物理速率依赖于调制方法、编码率、空间流数量、是否40MHz绑定等多个因素。这些影响吞吐的因素组合在一起,将产生非常多的物理速率供选择使用。比如基于Short GI,40MHz绑定等技术,在4条空间流的条件下,物理速率可以达到600Mbps(即4*150)。为此,802.11n提出了MCS的概念。MCS可以理解为这些影响速率因素的完整组合,每种组合用整数来唯一标示。对于AP,MCS普遍支持的范围为0-15。
2.8 MRC (Maximal-Ratio Combining)
MRC和吞吐提高没有任何关系,它的目的是改善接收端的信号质量。基本原理是:对于来自发射端的同一个信号,由于在接收端使用多天线接收,那么这个信号将经过多条路径(多个天线)被接收端所接收。多个路径质量同时差的几率非常小,一般地,总有一条路径的信号较好。那么在接收端可以使用某种算法,对这些各接收路径上的信号进行加权汇总(显然,信号最好的路径分配最高的权重),实现接收端的信号改善。当多条路径上信号都不太好时,仍然通过MRC技术获得较好的接收信号。